−
221
−다이폴 모델링 기법을 이용한 수중 전기장 신호 특성 예측 기법 연구
양창섭*·정현주·이종주·전재진
국방과학연구소 제6기술연구본부 무장발사/수중스텔스 그룹, 경남 진해시 현동 19번지, 645-600 (2008년 10월 21일 받음, 2008년 12월 3일 최종수정본 받음, 2008년 12월 15일 게재확정)
본논문에서는함정선체의갈바닉부식전류에 의해발생되는수중전기장신호를경계요소해석 도구인
FNREMUS
소프트 웨어를이용하여예측하고,
예측된신호로부터함정전기장신호 특성을특이치분해(singular value decomposition)
방법을이용하여 등가적으로다이폴모델링하는방법에 대해기술하고 있다
.
제안된다이폴 모델링기법은30 m
심도에서예측된경계요소해석결과와의평균 차이비교방법을통해타당함이확인되었다
.
본논문에서제안된모델링기법을이용하면함정에서의다양 한심도 변화에따른수중정전기장신호분포 특성예측및분석이 가능하다.
주제어
:
정전기장신호,
전기다이폴모델링기법,
특이치분해방법,
경계요소법I. 서 론
제
2
차 세계대전 이후부터 함정에 의해 수중에서 발생되 는다양한 전자기장 신호들은수중 방사소음 신호와 더불어 기뢰,
어뢰 및 감시체계들에 쉽게 탐지됨으로 인해 함정의안전에 큰위협이 되어 왔다
[1-3].
최근 세계 각국에서는 기존 위협 무기체계들에 대한 함정 대항 능력
(
소자,
탈자,
저 소음화 등)
의 발전에 대응하기 위한 방법으로 함정 선체의갈바닉 부식
(galvanic corrosion)
및외부전원법에 의한 음극방식시스템
(impressed current cathodic protection system)
으 로부터 해수를 통해 발생되는전류에 의한 수중정 전기장 신호를 탐지할 수 있는 신형 기뢰 및 감시체계를 개발하여 운용 중에 있으며,
아울러 이러한 위협으로 부터 함정을 보 호하기 위한 대책 연구들을 활발히 진행하고 있다.
그러나 지금까지국내에서는선체부식 현상규명과부식감소대책 에관련된연구들은다수진행되었으나 선체부식에의한수 중전기장신호 발생을최소화하기위한노력들은극히미흡 한실정이다.
따라서 본논문에서는함정에서발생되는수중 전기장신호감소대책 연구의일환으로경계요소해석도구 를이용한 함정 선체부식 전류에 의해 발생되는수중 전기 장신호 분포 특성을 예측하고,
예측된 신호로 부터 특이치 분해방법을이용하여대상함정을소수의등가전기 다이폴 배열로간략히모델링하는방안을제시하고자한다.
II. 선체의 갈바닉 부식 특성
선체의 부식은 부식의 여러 현상 중에서 갈바닉 부식에
해당된다
.
갈바닉 부식은 두개의 서로 다른 금속이 쌍을 이 룬상태로 전해질 용액 내에놓이게 되면 두금속의 갈바닉전위
(galvanic potential)
차에 의하여 상대적으로 낮은 전위(
이온화 경향이 큼)
를 가지는 금속이 우선적으로 부식되고 높은 전위(
이온화 경향이 작음)
를 가지는 다른 한 금속은 부식으로부터보호받게 되는현상을 의미한다.
Fig. 1
은 은-
염화은(Ag/AgCl)
전극을 기준전극으로 하여측정된 주요 금속들에 대한 해수 환경에서의 갈바닉 전위 특성을 나타낸다
.
여기서 부식되기 쉬운금속(
상대적인전위 가 낮은 금속)
을양극이라 표현하고 부식으로부터 보호되는 금속(
상대적인전위가높은 금속)
을음극이라한다.
일반적으로 함정 프로펠러의 재질로는 청동합금
(NAB,
Nickel Aluminum Bronze)
이 사용되고 있으며,
선체는 철로제작된다
. Fig. 1
에서 알 수 있듯이 은-
염화은 전극을 기준으로 한해수에서의 청동합금의 갈바닉 전위는 −
0.24 V
이고철의 갈바닉 전위는 −
0.59 V
이다.
따라서 철의 갈바닉 전위가청동합금에 비해 상대적으로 낮은 전위를 가지므로철은 산화되어 부식이 일어나는 양극이 되며
,
청동합금은 부식으로부터 보호되는 음극이된다
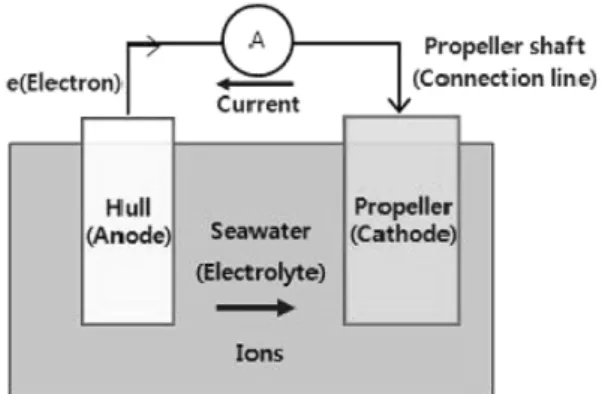
. Fig. 2
는선체 갈바닉 부식의원리를 나타내는 그림이다
.
프로펠러에 비해 상대적으로 낮*Tel: (055) 540-6341, E-mail: [email protected]
Fig. 1.Galvanic potential related to Ag/AgCl Electrode.
은 전위를 가지는 선체는 이온화
(Fe
→Fe
2++ 2e
−)
되어 전자는 프로펠러 축을 거쳐 프로펠러로 이동하고 철 이온은 해 수를 통해 프로펠러로 이동한다
.
이러한 원리로 선체-
해수-
프로펠러
-
프로펠러 축-
선체로 연결되는 폐 루프를 형성하며 전류가 흐르게 되고 이 전류에 의해 함정으로부터 정 전기장신호가 발생된다
[4, 5].
III. 갈바닉 부식 현상에 의한 정 전기장 지배방정식
갈바닉 부식에서 부식이 진행되는 동안 양극에서 방출되 는전류와 음극에서 흡수되는전류는 시간에 무관하게 항상 일정하다고 가정할 수 있으므로 부식과정에서의 전류는 다 음식
(1)
과같이 연속방정식으로정의될수있다[6].
(1)
여기서
, J
x, J
y, J
z는 각 축별 전류밀도[A/m
2]
를 나타낸다.
그리고 관심대상인 수중에서의 전기장의 세기
(
이하,
전기장)
는식
(2)
로표현될 수있다.
(2)
여기서
,
는 전류밀도[A/m
2], V
는 전위[V],
σ는 해수의전기전도도
[S/m],
는전기장세기[V/m]
를의미한다.
식
(2)
는 식(3)
으로 변환되고,
식(3)
을 식(1)
에 대입하 면식(4)
를구할 수있게 된다.
최종적으로식(4)
는식(5)
의
Laplace
방정식으로정리될수있다.
(3)
(4)
(5)
Laplace
방정식이전기화학적 부식에서지배방정식(governing
equation)
으로 사용될 때다음 식(6)~
식(8)
과 같이 양극과음극 및 도장이 된 선체 표면은 수치해석 모델의 경계조건 이된다
.
(
도장이 된선체표면) (6)
(
양극) (7)
(
음극) (8)
여기서
,
는 도장 손실이 전혀 없는 선체 표면의 전류밀 도이고,
는 양극에서의 전류 밀도이며,
는 음극에서의전류밀도를 내타낸다
.
그리고C
1, C
2, C
3은상수이다.
도장 손실이 전혀 없는 선체 표면은 전류가 흐르지 않으 므로 식
(6)
은다음 식(9)
로표현될수있다.
(9)
여기서
,
은 선체 표면과 수직방향인 법선벡터를 나타낸 다.
식(7)
과 식(8)
의 양극 및 음극에서의 전류밀도는 식(10)
과식(11)
로정리된다.
(10) (11)
식
(10)
과 식(11)
에서f
의 함수로 표시된 전위와 전류밀도 사이의 관계는 각 재질별 분극 곡선
(polarization curve)
∇ J⋅
=
∂J--- +
∂xx ∂J--- +
∂yy ∂J--- = 0
∂zzE
=
− ∇V,
J=
σEJ E
J
=
− σ ax∂V--- +
∂x ay∂V--- +
∂y az∂V---
∂z⎝ ⎠
⎛ ⎞
− σ ∂
∂x
---
⎝ ⎠⎛ ⎞∂V---
∂x+
∂y---
∂⎝ ⎠⎛ ⎞∂V---
∂y+
∂z---
∂⎝ ⎠⎛ ⎞∂V---
∂z⎝ ⎠
⎛ ⎞
=
− σ ∂2V∂x2
--- +
∂2V∂y2
--- +
∂2V∂z2
---
⎝ ⎠
⎜ ⎟
⎛ ⎞
= 0
∇2V
= 0
J
=
C1 Ja=
C2Jc
=
C3J
J
aJ
cJ n⋅
ˆ =
− σ∂V--- = 0
∂nn ˆ
Ja⋅n
ˆ =
− σ∂V--- =
∂n fa( )V=
C2 Jc⋅nˆ =
− σ∂V--- =
∂n fc( )V=
C3 Fig. 2.Galvanic corrosion model for ship’s hull.
Fig. 3.
Polarization curve at sea water for HY80 and NAB.
에따라 비선형적인 특성을 가진다
.
분극 곡선은 부식 과정에서 발생되는 전류밀도와 전위와의 관계로서
Fig. 3
은 해수에서의
HY80
강과NAB
각각에 대한양극 및음극 분극곡선들을 나타낸 그림으로
, HY80
강과NAB
가 동시에 존재하는 함정의 경우에는
HY80
계열의 선체는 부식이 일어나는 양극으로반응하고
, NAB
계열의 프로펠러는부식으로부터보호되는 음극이된다
[7].
IV. 경계요소 해석 도구를 이용한 함정 전기장 신호 해석
본논문에서는 부식에의한수중전기장신호 해석을위하
여 먼저
Fig. 4
와 같이 수면 하 길이180 m,
빔(beam)
폭30 m,
흘수6 m
인 수상함 형태의3
차원 등가 모델을 상용pre-processor
용 도구인PATRAN
을 이용하여 생성하였으며[8],
프로펠러 구조는 원반 모양으로 간략화 하여 구현하였다
.
해수에서 선체의 부식에 의한 수중 전기장 신호를 해석 하기 위해서는 해수와 접촉되어 전기화학 반응을 야기하는 수면 하 함정 형상만이 요구되며,
수중에서 전파되는 전기 장신호는 해수와 공기간의 상이한전도율 특성으로 인하여 해수면에서 반사되는 특성을 가지므로 수상함의 경우 수치 해석시대칭 구조해석을 하게된다.
Fig. 4
는경계요소해석을위해PATRAN
에서수행된3
차원모델 함정의 형상과 분할된 요소를 나타내며
,
제안된 모델 에적용된 요소의 형태는T6(triangular six noded elements)
또는
Q8(quadratic eight noded elements)
형태의 표면 요소 이다.
제안된모델에서 생성된요소 개수는T6
은14
개, Q8
은
1088
개였다.
본논문에서의 수치해석 방법으로는 경계요소법을 근거로 하여 영국
FNC(Frazer Nash Consultancy)
사에의해 개발된 수중 전기장 신호 해석 도구인
FNREMUS
소프트웨어를사용하였다
[9].
또한 해석을 위한 입력 조건으로해수의 전도율
(s)
은4 S/m
로가정하고,
선체 및프로펠러도장 손실은 전형적인 도장 손실 조건을 가정하여 각각
10 %
로설정하였다[10].
V. 다이폴 모델링 기법을 이용한 함정 전기장 신호 예측 기법 1. 전기 다이폴에 의한 정 전기장 신호
자기 다이폴에 의한 임의 위치에서의
3
축( x -, y -, z -
축)
방향의 정 자기장 신호는 비오 사바르의 법칙
(Biot-savart’s
law)
을 이용하면 쉽게 계산될 수 있다[11].
이와 유사한 방법으로 전기 다이폴에 의해 발생되는 수중 정 전기장 신호 의경우에도 하나의전기 다이폴 모멘트 집합 에의한전 기장 신호
사이의 관계는 다음과같이 행렬 형태의방정 식으로 표현될수있다
.
(12)
여기서
, p
x, p
y, p
z는 각축별 전기 다이폴 크기[Am]
이고, E
x, E
y, E
z는각축별 전기장의세기[V/m]
이며x, y, z
는전 기다이폴로부터 계산 위치까지의 각방향별 거리를 나타낸 다.
또한 σ1은 해수에서의 전도율(conductivity)
로서 단위는[S/m]
이다.
함정 강자성 선체에 의해 발생되는 자기장 신호의 경우에는 매질의 경계면
(
해수면,
해저면)
의 조건에 무관 하지만,
전기장 신호의 경우에는 공기 중의 전도율이 해수 와 다르므로,
해수면 아래의 모든 전기 다이폴들은 다음과 같이 해수면 위의 동일한 이격 거리에서의 반사 영상(image)
다이폴p'
을가지게 된다.
(13)
여기서
,
σ0는 공기 중의 전도율을 나타낸다.
또한 해저면 의 경우에도 해수와 다른 전도율을 가지게 되므로,
해저면 위의 모든 전기 다이폴들은 해저면 아래의 동일한 이격 거 리에서의 반사 영상 다이폴p''
을가지게 된다고 가정할 수 있다.
(14)
여기서
,
σ2는 해저면의전도율을 나타낸다.
해수면과해저E p
Ex Ey Ez
= 1 4
πσ1r5--- 3
x2 − r23
xy3
xz3
xy3
y2 − r23
yz3
xz3
yz3
z2 − r2px py pz
px' py' pz'
=
σσ1 − σ01
+
σ0---
ppxypz
px'' py'' pz''
=
σσ1 − σ21
+
σ2---
ppxypz Fig. 4.
BEM model of a surface ship.
면의 두 경계면의 존재는 무한한 연속 반사면을 발생하며
,
해수에서의 부식 전류 자체에 의한 전기장 값에 추가되어 나타나게 된다
.
그러나 본 논문에서는 경계요소 해석 도구인
FNREMUS
소프트웨어가 해저면의 영향을 배제한 상태에 한해 해석 가능하므로 해저면이 충분히 깊은 심도를 가 진다고 가정하여 전도율차이에 의한 해저면의 전기장 신호 의반사 효과는 고려하지않았다
.
한편식
(12)
는식(15)
와같이 간략화한 형태로가정하여다시표현될 수있다
.
[E] = [D][p] (15)
또한식
(15)
는식(16)
에서의경우처럼 다수의계산 위치들에 대해 소수의 다이폴 집합들에 의한 전기장 행렬 계산 으로확장하여 표현될수있다
.
(16)
여기서
, E
i는 계산 위치에서의3
축 방향( x -, y -, z -
축)
전기장 성분들을 의미하며
, D
ij는j
번째 다이폴 집합의 위치 좌표와i
번째 계산 위치 좌표간의 거리 함수로 표현되는
[3 × 3]
행렬로 표현될 수 있다.
단,
계산 지점인
n
의 개수는 다이폴p
의 개수보다 크다고 가정한다.
따라서 식
(16)
은 다시 식(17)
과 같이 간략화한 형태로표현될수있다
.
[
E] = [
F][
p] (17)
2.특이치분해 방법을이용한 등가다이폴 모델링기법 연속된 다수의 위치 좌표들에서의 전기장 신호 값들로 부터 분석대상
(
모델 함정)
에서의 소스 정보(
다이폴)
를 찾 아내는 방법은 미지수(
다이폴)
의개수보다더많은선형 방 정식(
위치 좌표별 전기장 신호 값)
을 가지는 과 결정 시스 템(over-determined system)
에 해당된다.
만일[ E ] = [ F ][ p ]
로표현되는 계수 행렬
F
가[ n × n ]
차수의 선형시스템인경우
,
계수 행렬F
의 역행렬이존재한다면 형태로 변환하여 벡터p
의해를 쉽게구할 수있지만 계수 행렬F
가[ n × m ]
차수의 선형시스템인 경우에는 역행렬이 존재하지 않으
므로 정확한 해를 구할 수 없게 된다
.
이경우에는 식(18)
과 같이 잔차
(residual error)
를 최소화하는 특이해 분해(singular value decomposition)
방법을 이용하여 근사해를 구하게 된다
[12].
[
p] = ([
F]
T[
F])
−1[
F]
T[
E] (18)
여기서
[ F ]
행렬은 전기 다이폴의 각 성분별 세기( p
x, p
y, p
z)
를 각각1[Amp
·meter]
로 가정한 상태에서1
번~ 3
번 계산 라인들에서의 거리별 전기장 값으로 구성하고,
[ E ]
행렬은 경계요소 해석 도구(FNREMUS)
를 통해 계산된 −
200 m
에서+200 m(1 m
간격)
까지의 전기장 신호 값들로 표현한다면
,
구하고자 하는 전기 다이폴 값인[ p ]
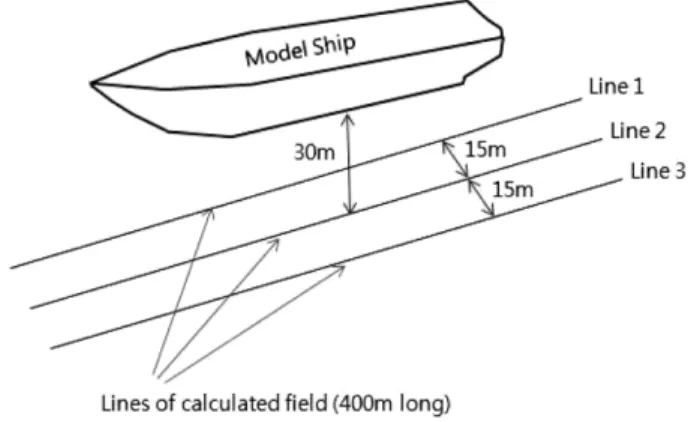
열벡터의 근사 해를 구할 수 있게 된다. Fig. 5
는모델 함정의 빔폭에 해당되는 심도
30 m
에서의 계산라인들을 보여준다
.
아울러
,
전기 다이폴의 최적 해를 찾아내기 위한 방법 으로 최초에는 함정 흘수선 중앙에 하나의 다이폴 집합 을 가정하여 근사 해를 구하고 차례로 다이폴 수를 등 간격으로 하나씩 증가시켜 가면서 각각의 경우에 대해 자기 다이폴의 해를 구하였다.
본 모델 함정의 경우에는최적 전기 다이폴수는
Fig. 6
과같이10
개였으며,
경계요소해석 결과와의 평균 차이는 약
0.7 dB
임을 확인할 수있었다
.
단,
평균차이(average difference)
비교는각각의계산 지 E1...
Ei ...
En =
D11... D1j... D1m ... ... ... ... ...
Di1... Dij... Dim ... ... ... ... ...
Dn1... Dnj... Dnm p1
...
pj ...
pm
Fig. 5.
Calculation lines below a model ship.
Fig. 6.
Optimum number of dipoles for electric field.
점에서 경계요소 해석 결과 값과 다이폴 모델링 결과
값의 차이를 평균하여 비교하는 방법으로 식
(19)
와 같이 정의하였다
.
(19)
여기서
, A
i와B
i는 각각i
번째 지점에서의 경계요소 해석 결과값과 다이폴모델링에 의한계산값을 의미한다.
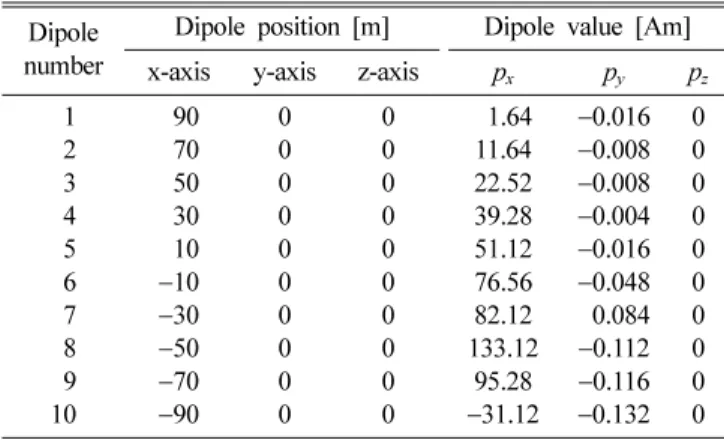
Table I
은30 m
수심에서의 경계요소 해석을 통해 계산된전기장 신호에 대한 다이폴 모델링 결과 값을 정리한 것이 며
, Fig. 7
은30 m
수심에서의3
축 방향( x -, y -, z -
축)
전 기장 신호에 대한 경계요소 해석 결과와 다이폴 모델링 결 과들을비교하여 나타낸것이다.
30 m
심도에서의 모델 함정의 전기장 신호에대한 경계요소해석 결과와다이폴모델링결과를비교하면프로펠러위
치 부근에서의 최대 수평
( x )
축 및 수직( z )
축 전기장 신호의크기는
Table II
와 같이 다이폴 모델링의 결과가 각각 약10 %
와30 %
정도 작게 나타났으나,
전체적인 신호 파형의형태는 거의 유사함을 확인할 수 있었다
.
다이폴 모델링 결 과의 최대 전기장 신호 크기가다소 작게 나타난 원인은 함 정 갈바닉 부식 모델에서 음극 분극으로 반응하는프로펠러 의실제위치가경계요소해석모델의경우수면으로부터 약8 m
정도 아래에 위치하지만 제안된 다이폴 모델링 방법은 함정 흘수선(
수면)
에전기 다이폴들을 차례로배치함에 따른다이폴위치 좌표차이가주요원인인것으로판단되므로향 후추가적인알고리즘보완이필요할것으로판단된다
.
Table I
의30 m
심도에서의 등가 다이폴 모델링 예측 결과를 식
(17)
에 대입하면 함정 수미선 아래 임의 수심에서의
3
축전기장 신호예측이 가능하게 되며, Fig. 8
은수미선아래
60 m
심도에서의3
축 전기장 신호를 예측한 결과를보여준다
.
VI. 결 론
본 논문에서는 함정 선체의 갈바닉 부식 전류에 의해 발 생되는 수중 정전기장 신호 특성을 경계요소 해석 도구를 통해 예측하고
,
예측된 수중 전기장 신호 값들로 부터 특이 치 분해(singular value decomposition)
방법을 이용한 다이폴 모델링 기법을 제안하였다.
함정 전기장 신호에 대한30 m average difference dB
[ ]= 20log
10Ai −20log
10Bii = 1
∑n
---
nTable I.
Optimum electric dipole values.
Dipole
number Dipole position [m] Dipole value [Am]
x-axis y-axis z-axis
px py pz01
−90 0 0 01.64
−0.016 0
02
−70 0 0 11.64
−0.008 0
03
−50 0 0 22.52
−0.008 0
04
−30 0 0 39.28
−0.004 0
05
−10 0 0 51.12
−0.016 0
06
−10 0 0 76.56
−0.048 0
07
−30 0 0 82.12
−0.084 0
08
−50 0 0 133.12
−0.112 0
09
−70 0 0 95.28
−0.116 0
10
−90 0 0
−31.12
−0.132 0
Fig. 7.
The comparison between dipole modelling analysis and BEM analysis at 30 m under the keel line.
Table II.
The comparison of maximum values between dipole modelling result and BEM result at 30 m depth.
Axis Maximum values of electric field [normalized]
FEM result Dipole modelling result Difference [%]
x
−0.50
−0.45 10
y
−0.00
−0.00 00
z
−0.92
−0.71 30
Fig. 8.
The prediction result at 60 m under the keel line.
심도에서의경계요소 해석 결과를 이용하여 등가 다이폴 모 델링을 수행한 결과
,
두 해석 결과들의 평균 차이는 약0.7 dB
로 유사하였으므로 제안된 역문제 해석 알고리즘은 타당한것으로 판단된다
.
따라서 본 논문에서 제안된 다이폴 모 델링 기법을 이용하면 다양한 심도에서 대상 함정에 의해 발생되는수중 전기장 신호 분포 특성을쉽게 예측할 수있 으므로 향후수중 전기장 신호 탐지 위협세력과 함정 상호 간의 실시간 상호 영향 분석 장비 개발 시에도 직접 활용 가능할것으로 판단된다.
참고문헌
[1] S. J. Davidson and G. J. Webb, Ultra Electronics PMES (report) (1998) pp. 1~9.
[2] S. J. Davidson, T. Bailey, A. Parker, R. Twelvetrees, and M.
Turener, Ultra Electronics PMES (report) (2000) pp. 1~5.
[3] J. C. Hubbard, S. H. Brooks, and B. C. Torrance, UDT 96,
1
(1), 480 (1996).
[4] Richard Holt, Warship Cathodic Protection 2001,
1(1), 21
(2001).
[5] Godwin Kakuba, The impressed current cathodic protection system (Master’s Thesis), Technische Universiteit of Eind- hoven (2005) pp. 7~19.
[6] Godwin Kakuba, The impressed Current Cathodic Protection System (Master thesis), Technische Universiteit Eindhoven (2005), pp. 15~19.
[7]
정현주,
양창섭,
전재진,
한국군사과학기술학회지,
11(2), 43 (2008).
[8] Microsoft, MSC. Patran reference manual (FE modeling), Microsoft (2007) pp. 60~446.
[9] A. J. Keddie, FNREMUS detailed modeller user guide, FNC Dorking Surrey (2007) pp. 6~44.
[10] A. F. Wylie and M. D. Pocock, FNREMUS characterisation suite user guide, FNC Dorking Surrey (2007) pp. 8.
[11]
양창섭,
정현주,
한국자기학회지,
17(6), 259 (2007).
[12] P. Neittaanmaki, M. Rudnicki, and A. Savini, Inverse Prob- lems and Optimal Design in Electricity and Magnetism, Clar- endon Press, Oxford (1996) pp. 161~171.
A Study on Prediction Technique for Underwater Electric Field Signature Characteristic using Dipole Modelling Method
Chang-Seob Yang*, Hyun-Ju Chung, Jong-Ju Lee, and Jae-Jin Jeon
Underwater Weapon Launching and Stealth Group, Naval Systems Research Development Center,
Agency for Defense Development, P.O. Box 18 Jinhae, Kyungnam 645-600, Korea (Received 21 October 2008, Received in final form 3 December 2008, Accepted 15 Dcember 2008)
This paper describes the equivalent dipole modeling method utilizing a singular value decomposition technique from analysis data by the FNREMUS Detailled Modeller software based on BEM which can predict the underwater electric field signal due to a galvanic corrosion phenomenon on a naval vessel. The proposed dipole modeling method was successfully verified in good agreement with predicted BEM data at 30 m depths through the comparison of average differences. The proposed dipole modelling method can be effectively used in the prediction and analysis of static electric field signature distributions generated from a naval vessel at any different depths.
Keywords :