75톤 연소기용 연료개폐밸브의 특성에 대한 고찰
이중엽*, 이수용**
A study on the characteristic of fuel shutoff valve for 75 ton f combustion chamber
JoongYoup Lee*, SooYong Lee**
Abstract
Fuel shutoff valve of a combustion chamber controls propellant mass flowrate of a rocket engine, by using pilot pressure and spring force. The developing fuel shutoff valve can be self sustained even though pilot pressure is removed in an actuator.
Therefore, it is necessary to analyze the characteristics of the forces with respect to the opening and closing of the valve in order to evaluate its performance. In light of this, the valve has been designed to adjust the control pressure for the opening of the poppet and to determine the working fluid pressure at which the valve starts to close.
This paper also has been predicted flow coefficient of the valve by Fluent(ver. 12.0) CFD analysis. Various results from the prediction and the analysis have been compared with experiments.
초 록
연소기용 연료개폐밸브는 파일롯 공압으로 포핏을 열고 스프링 힘에 의해 닫음으로써 로켓엔진의 연료 유량을 제어한다. 현재 개발 중인 연소기 연료개폐밸브는 액추에이터에서 압력이 제거되더라도 유로부에 해당 압력이 존재한다면 스스로 열림을 유지하는 방식으로 설계되어 있다. 밸브의 성능을 평가하기 위해 밸브가 열리고 닫히는 특성에 따라 힘 평형 상태를 분석할 필요가 있다. 이를 위하여 밸브의 포핏이 열리기 위한 파일롯 압력과 닫히 기 위한 유로부 압력을 힘 평형에 의해 조절되도록 설계하였다. 또한, 상용 소프트웨어 인 Fluent CFD 해석을 통해 밸브의 고유유량계수를 구해보았다. 예측과 해석을 통해 획득 된 결과들은 실험 결과와 비교하였다.
키워드 : Combustion chamber fuel valve(연소기 연료밸브), Self Sustained(스스로 열림 유지), Force Balance (힘 평형), Inherent flow coefficient (고유유량계수)
접수일(2012년 5월 9일), 수정일(1차 : 2012년 6월 14일, 게재 확정일 : 2012년 7월 1일)
* 발사체미래기술팀 / [email protected] ** 발사체미래기술팀 / [email protected]
Ⅰ. 서 론 액체 추진기관에서 이용하는 발사체용 밸브는
일반적인 산업용 밸브에 비해 작동 조건이 매우
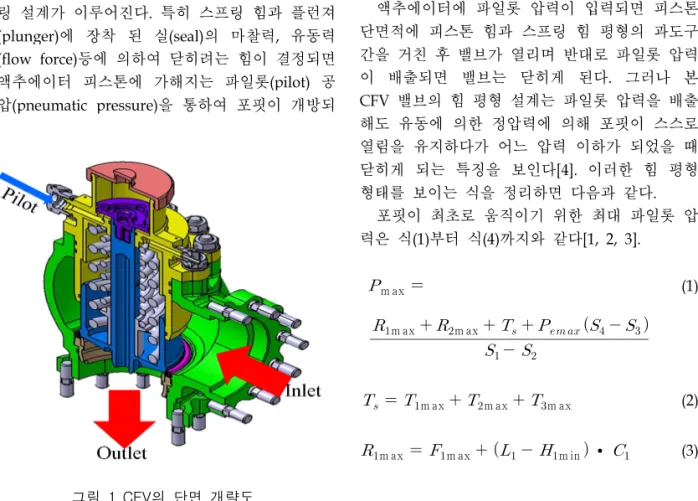
그림 1 CFV의 단면 개략도
극한적이고 제한적이다. 압력손실과 무게를 최소 화해야 할 뿐만 아니라, 동시에 요구되는 기밀성 능을 유지해야 하는 등의 어려움이 있다. 현재 개발 중인 연소기용 연료개폐밸브(CFV, combustion chamber fuel valve)는 파일롯 공압 이 유입되면 액추에이터가 상승되고 포핏 (poppet)이 개방됨과 동시에, 유동이 형성되는 구조로 이루어져 있다. 이 때 시스템의 요구도에 따라 포핏이 개방된 상태에서 액추에이터에 인가 된 공압을 제거하게 된다. 비록 공압이 제거되더 라도 힘 평형(force balance)에 의해 스스로 열림 (self sustained)을 유지하며, 유로부의 정압력의 힘이 스프링에 의한 힘 보다 적을 경우 스스로 닫히게 되는 기계적 특성이 있다[1].
시스템 설계 안에 따라 단품인 CFV의 개폐를 위한 전단과 후단의 압력과 CFV의 개방 시 정격 유량, CFV 응답 특성에 따른 입력 조건은 기 설 정되어 있고, 이를 기반으로 하는 동특성 검증은 정적상태의 힘 평형 관계식을 통해 최초의 스프 링 설계가 이루어진다. 특히 스프링 힘과 플런져 (plunger)에 장착 된 실(seal)의 마찰력, 유동력 (flow force)등에 의하여 닫히려는 힘이 결정되면 액추에이터 피스톤에 가해지는 파일롯(pilot) 공 압(pneumatic pressure)을 통하여 포핏이 개방되
는 시점의 압력을 구할 수 있다. 그리고 포핏이 완전 열린 시점에서 파일롯 압력과 파일롯의 압 력을 제거 후 스스로 열림을 유지하기 위한 CFV 의 유로압력, CFV가 완전 닫힘 상태로 유지되는 시점의 압력을 설계할 수 있다.
본 논문에서는 CFV의 정적 상태에 대한 힘평 형 식을 정리해보았으며 70 bar 파일롯 압력을 입력 시 밸브가 최초로 열리기 시점과 완전히 열 림 상태에서의 당시의 압력을 예측해 보았다. 스 스로 열림을 유지하다가 유로부 전단압력 변화에 따라 닫힘 당시의 압력도 계산했다. 또한 Fluent 를 CFD 해석을 통해 CFV가 정격 유량 대비 작 용하는 차압을 예측하였고, 실제 실험을 통해 요 구도 및 예측값에 대한 그 차이를 확인했다.
Ⅱ. 본 론
2.1 정적 상태의 힘평형
액추에이터에 파일롯 압력이 입력되면 피스톤 단면적에 피스톤 힘과 스프링 힘 평형의 과도구 간을 거친 후 밸브가 열리며 반대로 파일롯 압력 이 배출되면 밸브는 닫히게 된다. 그러나 본 CFV 밸브의 힘 평형 설계는 파일롯 압력을 배출 해도 유동에 의한 정압력에 의해 포핏이 스스로 열림을 유지하다가 어느 압력 이하가 되었을 때 닫히게 되는 특징을 보인다[4]. 이러한 힘 평형 형태를 보이는 식을 정리하면 다음과 같다.
포핏이 최초로 움직이기 위한 최대 파일롯 압 력은 식(1)부터 식(4)까지와 같다[1, 2, 3].
m ax
m ax
m ax
(1)
m ax
m ax
m ax
(2) m ax
m ax
m in
·
(3) m ax
m ax
m in
·
(4)여기서, 는 힘평형에 의해 계산 된 압력, 는 스프링의 압축힘이며, 는 힘이 작용하는 부 분에서의 단면적, 는 마찰힘이다. 은 스프링 압축 길이에서 압축 여유를 포함하는 압축힘이 고, 은 압축길이이며, 는 스프링 제작 후 허 용하는 공차 길이, 는 스프링 상수이다.
포핏이 최초로 움직이기 위한 최소 파일롯 압 력은 식(5)부터 식(7)과 같다.
m in
m in
m in
(5)
m in
m in
m ax
·
(6) m in
m in
m ax
·
(7)여기서, min은 스프링이 초기 압축된 길이에 서 최소 압축 여유를 포함하는 압축힘이며,
min 스프링 장착상태에서 압축힘 이다. min
과 min은 각각 스프링 초기 및 장착 상태의 최 소 압축힘이다.
포핏이 완전 열림 시점에서의 최대 파일롯 압 력은 식(8)부터 식(10)과 같다.
m ax
m ax
m ax
(8)
m ax
m ax
m in
·
(9) m ax
m ax
m in
·
(10)max는 포핏이 최대 스트로크로 열렸을 당시
의 스프링의 최대 압축힘이고, max는 플러스 방향으로의 최대 여유를 포함하는 압축힘이다.
설계 max는 스프링 운용 압축 길이에서 최소 압축 여유를 포함하는 압축힘이고, max는 최대 여유를 포함하는 압축힘이다.
포핏이 완전히 열렸을 당시의 최소 파일롯 압 력은 식(11)부터 식(13)과 같이 나타낼 수 있다.
m in
m in
m in
(11)
m in
m in
m ax
·
(12) m in
m in
m ax
·
(13)포핏이 스스로 열림을 유지하다가 닫히기 시 작하기 위한 과도구간의 유동의 최대 압력은 식 (14)이고, 그 당시 유동의 최소압력은 식 (15)와 같다.
m ax
m ax
m ax
(14) m in
m in
m in
m ax
m ax
m ax
(15)포핏이 스스로 열림을 유지하다가 포핏이 시 트(seat) 완전 닫힌 시점에서 유동의 최대 압력은 식 (16)과 같고 최소압력은 식 (17)으로 나타낼 수 있다.
m ax
m ax
m ax
(16)
Target Friction [bar]
No friction [bar]
Pilot pressure for valve
poppet cracking
10.6 ~ 15 9.3 ~ 11.1Pilot pressure at full
closed status of poppet
16.1 ~ 18 14.8 ~ 16.7Upstream pressure at the
moment of closing
27.6 ~ 38.8 37.3 ~ 42Upstream pressure at full
closed status of poppet
13.8 ~ 24.8 23.5 ~ 28표 1 힘평형식 의한 계산 결과
그림 2 CFV의 Fluent(Ver.12) 유동해석 결과
m in
m in
m in
m ax
m ax
m ax
(17)
앞서 제시한 힘평형 식들을 계산하면 표 1과 같은 결과를 얻을 수 있다. 기밀 유지를 위한 오 링(O-ring) 부위에서 마찰력이 발생되는데 마찰 력이 존재여부에 따라 밸브의 동특성이 바뀜을 알 수 있다. 즉, 마찰력이 존재할 경우 그 저항요 소로 인해서 높은 압력이 밸브가 작동 되는 것을 알 수 있다. 현재 요구도에 의한 파일롯 압력은 70±10 bar 헬륨을 사용한다.
CFV는 개방 후 유동이 스프링 힘보다 크면 스스로 열림을 유지하도록 설계되어 있다. 따라 서 표 1에서 보는 바와 같이 밸브의 전단의 압력 의 감소는 곧 터보펌프의 종료 모드로 진입 했음 을 의미하며, 닫힘 설계 압력에 이르면 자동으로 닫히게 된다. 임무 상 신뢰도를 위해 터보펌프이 정상상태의 토출압력이 형성되면 CFV의 액추에 이터에서 파일롯 압력을 제거하게 된다. 해압이 되더라도 이미 CFV의 전답압력이 스프링의 닫히 려는 힘보다 크기 때문에 CFV는 열림 상태를 유 지하게 된다.
2.2 CFD 해석을 통한 유량계수 예측
CFV 형상에서 발생되는 차압은 그림 2와 같 으며, 그 값을 예측하기 위해 상용 프로그램인 Fluent 12를 이용했다. 유동해석 결과를 통해 고 유유량계수의 를 결정하고 해석을 위한 실험 조건과 근사되도록 배관 길이 및 센서의 위치를 그림 3과 같이 선정했다. 해석 시 CFV 전단과 후단의 초기 압력 경계조건은 요구도에 의한 압 력차와 정격 유량치를 참고했다. 해석과 실험에 서 전단 및 후단압력 계측 부는 CFV 기준으로 배관 내경 대비 5×d 전과 후에 위치토록 했다.이것은 Fluent 12의 해석 결과를 근거로 한다.
즉, 5×d 계측 위치는 밸브 후단부 축류부 (Vena Contracta)의 유동 후류에서 유동이 완전 발달 된 위치에 계측포트가 있고, 밸브 전단부에서는 유속이 크게 작용하여 압력 변화가 크게 발생하 는 부분을 피하여 전단 5×d에 위치시켰다.
CFD 해석 결과 입구 압력이 101 bar이고, 유 량은 71 kg/s로 할 경우 CFV의 출구측 5×d 위 치에서의 압력은 98.2 bar가 발생됨을 알 수 있 고 당시의 유량과 차압을 이용하여 고유유량계수 로 환산하면 약 200이 계산됨(식 18)을 알 수 있 다. 이것은 엔진 개발을 위한 시스템 요구도인
178보다 약 11% 큰 값이므로 차압에 대한 여유
U pstream, D ow nstream,
CFV
dP gage
그림 3 CFV의 밸브특성 및 유량계수 실험을 위한 시스템 설치도
11.80 11.85 11.90 11.95 12.00 12.05 12.10 12.15 46.0
46.5 47.0 47.5 48.0 48.5 49.0 49.5 50.0
-0.01 0.00 0.01 0.02 0.03 0.04 0.05
0 9 18 27 36
Pressure [bar]
Pressure [bar]
dP Gage Upstream pressure
Flow meter
Time [sec]
Flow [L/s]
0.188 s 0.115 s
그림 4 정압센서 대비 차압센서 및 터빈유량계의 동기화
가 충분하다[1, 4].
2.3 유량계수 검증을 위한 실험 및 결과
실제 CFV에 대한 실험은 전단압력을 달리하 여 여러 조건에서 수행했으나 모두 난류임을 감 안하여 전단압력이 약 48 bar가 유지되는 영역에 서만 유량 계수 실험 결과를 본 논문에 제시하였 다. 실험은 과도 구간에서의 각 계측기의 측정 지연시간을 확보하기 위해 샘플링은 1 kHz로 수 행했다. CFV의 유량계수를 측정하기 위해 41 ℓ /s (3 inch) 까지 측정 가능한 유량계를 사용했 다. CFV의 고유유량계수 예측값이 CFD 해석 결 과 약 200 이며, 그 만큼 밸브에 작용하는 차압 은 매우 작을 것으로 판단된다. 따라서 일반적으 로 사용되는 정압 센서(Static pressure transducer) 외에 차압센서(Differential pressure transducer, dP gage)를 적용하여 서로 그 값을 비교 하였다. 실험에서도 CFD 해석과 일치하도록 배관에 5×d 부근에 밸브 전단과 후단의 압력 을 계측할 수 있도록 했다[4].
유량 실험을 위해 그림 3과 같이 배관길이를 적용했다. 밸브 내경이 약 83 mm이므로, 5×d인 약 415 mm에 압력포트가 존재하며 충분히 발달 된 유동이 되도록 후단에도 동일하게 포트 전단 의 배관길이 만큼 위치하도록 했다. CFV의 고유 유량계수가 클 것으로 대비하여 차압센서는 최대 점을 5 bar로 보정했다. 정압센서는 주파수 응답 특성이 5 kHz이고, 0.1%(Full scale)의 정도를 운 용되는 센서를 이용했다. 정압센서의 압력 센서 의 범위는 최대 보정점이 50 bar이다[5].
그림 4에서와 같이 고유유량계수 측정 당시 사용된 센서의 초기 과도 구간에서 동특성을 볼 수 있다. 정압센서가 반응 시간이 가장 신속하므 로 그 값을 기준으로 하여 차압센서 및 터빈 유 량의 기동 점을 파악 할 수 있다. 정압센서에서 계측 된 최초의 압력 변이의 시간을 기준으로 했 을 때 차압센서는 약 0.115 s 후 계측이 시작되 는 것을 알 수 있고, 터빈 유량계는 약 0.188 s 지연되어 계측 값이 업데이트됨을 알 수 있다.
원인으로는 정압센서의 계측 회로 방식과 달리 차압센서나 터빈 유량계는 신호 자체의 업데이트 에 대한 지연이 발생됨과 동시에 변환기 및 증폭 기에 의한 노이즈 제거 후 최종적으로 계측기로 신호를 전달하기 때문에 지연이 발생 될 것으로 판단된다. 따라서 가능한 정상상태의 유량이 지
12 13 14 15 16 17 18 -0.2
0.0 0.2 0.4 0.6 0.8 1.0
Pressure [bar]
Time [sec]
P1-P2 dP Gage P1-P2, Smoothing
그림 5 실험유량 대비 CFV에 작용하는 정압센서 및 차압센서를 이용한 압력차 계측
속적으로 토출 될 수 있도록 고압 및 대유량 소 스가 필요하게 된다.과도 구간에서 각 센서의 업데이트 시간을 확 인해본 결과 각각의 차이를 보이는 것을 확인 할 수 있다. 동기화를 통해 계산된 는 압력차가 급격히 커지는 구간 즉, 전단압력이 급격히 바뀌 는 구간(유량계와 차압센서가 업데이트 시간이 각각의 차이로 동기화 되지 못하는 구간)에서는 측정 값 자체의 큰 섭동으로 계산됨을 알 수 있 고, 이는 곧 신뢰할 수 없게 된다. 따라서 가능한 전단압력이 적절히 유지되는 정상상태 구간에서 고유유량계수 값을 계산하는 것이 옳을 것이다.
차압센서의 경우 변환기 자체가 노이즈를 제 거 후 신호를 발생시키기 때문에 그만큼 데드 밴 드 영역이 발생된다. 그림 5에서와 같이 CFV 전 단과 후단에 작용하는 차압을 측정한 것이다. 점 선은 전용 차압을 측정하는 차압 신호이고, 파선 은 밸브 양단간에 장착하여 차압을 측정할 수 있 는 일반적인 정압 계측 신호이다. 그림 3에서 보 는 바와 같이 같은 포트를 이용하여 차압 및 정 압을 측정할 수 있으므로 각각에 대한 차압 분포 도를 파악할 수 있다.
그림 5에서 같이 차압센서의 경우 신호 변환 기를 통해 노이즈를 제거 후 계측기에 입력되므 로 업데이트 시간이 존재하지만 그만큼 깨끗한
신호를 확보할 수 있다. 따라서 정상상태로 유지 할 수 있다면 실제 측정하려는 밸브의 차압을 정 확히 측정할 수 있다. 차압 센서와 달리 정압 센 서의 경우 센서 자체의 입력 신호를 증폭하여 출 력하기 때문에 일부 노이즈를 포함하고 있지만 전기 회로를 기반으로 하기 때문에 주파수 응답 속도가 빠르게 된다. 그러나 각각의 정압센서로 부터 확보된 데이터는 후처리를 한 후 차압을 계 산하기 때문에 CFV처럼 차압이 작은 밸브일수록 그 만큼 작은 범주 내에서 섭동 폭은 상대적으로 크게 보인다. 그림 5에서와 같이 초기 계산값은 회색 실선과 같이 노이즈를 포함하고 있으나 100 Hz FFT 스무딩(Smoothing)을 수행하면 파선의 형태를 띤다. 정압력 차를 후처리하여 계산한 값 과 차압센서를 통해 획득 한 값을 비교 시 표 2 와 같이 약 5.3%의 오차를 보인다.
∆
(18)
여기서, 는 고유유량계수, 는 체적유량[US gpm], 는 비중,
∆
는 압력차[psi]고유유량계수 계산식은 식 (16)과 같다[6, 7].
실제 시스템을 운용하여 발생되는 정격 유량과 압력은 실험설비에서 일정하게 발생시키기가 까 다로운 관계로 각 사용유체에 대한 압력차 및 유 량, 밀도를 알고 있다면 고유유량계수를 통해 그 크기를 가늠할 수 있다. 그림 5에서 획득 된 압 력차를 이용하여 식 (18)에 실험 당시 발생된 물 유량을 입력하면 을 획득 할 수 있다. 그림 6 과 표 2를 보면 고유유량계수 요구도가 약 179이 며, CFD 예측 값은 약 201 정도 된다. 그러나 실 제 실험에서는 차압센서를 이용할 경우 약 192이 며, 정압센서를 이용한 그 차는 약 202 이다. 차 압센서를 이용할 경우 예측값 대비 약 5% 작고, 정압센서를 이용한 고유유량계수 값은 예측값 대 비 대동소이함을 알 수 있다.
12 13 14 15 16 17 18 100
120 140 160 180 200 220 240 260
Time [sec]
Cv
dP gage P1-P2
그림 6 정압센서 및 차압센서를 이용한 측정 방식에 따른 고유유량계수 비교
CFD
Test results dP gage Static
press.
[s] 14 ~ 17.5 (averaging)
[bar] 2.7 0.498 0.526
200.9 191.6 202.4 표 2 해석 및 실험에 대한 각 물리량 비교
Ⅲ. 결 론
정적상태의 힘 평형 관계식을 통해 스프링 설 계를 수행했다. 최초로 포핏이 움직일 때의 파일 롯 정압력과 포핏이 완전 열린 시점에서 파일롯 압력, 파일롯의 압력을 제거 후 스스로 열림을 유지하기 위한 밸브의 유로압력, 밸브가 완전 닫 힘 상태로 유지되는 당시의 압력을 구해 보았다.
밸브의 초기 입력조건을 이용하여 고유유량계수 를 예측할 수 있었다.
최대 스트로크 상태일 때 밸브 형상을 CFD 해석을 통해 밸브가 형상적으로 내포하고 있는 고유유량계수를 계산할 수 있었다. 또한 요구도
대비 해석결과의 검증을 위한 유량계수 실험을 수행 했다. 차압센서를 이용한 밸브에 작용하는 차압은 정압센서를 통해 측정한 다음 후처리한 차압 대비 평균 약 5 %로 작았다.
이러한 힘평형 해석관련 설계인자의 영향을 예측하고 측정방법을 제시함으로써 향후 개발하 는 CFV는 물론, 관련 밸브류의 설계 및 제작에 활용할 수 있을 것으로 기대한다.
참 고 문 헌