콘크리트工學 大 韓 土 木 學 會 論 文 集
第28卷 第6A 號·2008年 11月 pp. 873 ~ 880
콘크리트 터널 라이닝의 외관조사를 위한 자동화 결함인식 시스템 개발
Automatic Defects Recognition System for Visual Inspection on Concrete Tunnel Lining
박석균*·이강문**
Park, Seok-Kyun·Lee, Kang-Moon
···
Abstract
When checking the state of deterioration or damage structures, regular visual inspection has very important role. At this point, a visual inspection is performed mainly by sketch or photography with a camera of inspectors. If that happens, it takes a lot of effort and time to inspect appearance damages. The purpose of this study is to develop the automatic recognition system for a more efficient and effective inspection of appearance damages. In the process, the image processing technology and the data management & analysis system for damage recognition are mainly developed and applied. This automatic recognition sys- tem enables inspectors or clients to obtain correct data that can recognize a damage, such as, crack, water leakage, efflores- cence, delamination (peeling), spalling, etc. In addition, this study takes aim at the effect of secure safety, functional maintenance and extension of design lifetime according to build up continuous and systematic data management system.
Keywords : concrete tunnel lining, defects, visual inspection, image processing, automatic recognition system
···
요 지
구조물의 열화 또는 손상상태 점검 시 정기적인 외관조사는 매우 중요한 역할을 담당한다. 이때 실시되는 외관조사는 주 로 조사자의 스케치나 일반 카메라를 이용한 사진촬영에 의해 이루어지고 있다. 이럴 경우, 조사에 많은 노력과 시간이 소 요된다. 따라서 본 연구에서는 보다 효율적이고 효과적인 조사를 위하여, 터널 외관상의 결함을 자동인식 할 수 있는 시스 템을 개발하고자 한다. 이 과정에서 결함 손상인식을 위한 화상처리기술과 데이터 관리 및 분석 시스템이 중점적으로 개발 응용되었다. 이를 통해 콘크리트의 균열, 누수, 백화, 박리, 박락, 손상 등의 결함을 인식하여 데이터를 획득하고, 지속적이고 체계적인 데이터 관리시스템을 구축하여, 터널의 안전성 확보, 기능성 유지, 수명연장 등의 효과를 얻고자 한다.
핵심용어 : 콘크리트 터널 라이닝, 결함, 외관조사, 화상처리, 자동화 인식 시스템
···
1. 서 론
구조물의 이상 또는 열화상태 점검 시 정기적인 외관조사 는 매우 중요하고 큰 비중을 차지하고 있다. 이에 대해서는 지금까지 이상 또는 열화가 발견된 곳에 대해서는 주로 육 안조사를 통한 스케치나 일반 카메라를 이용한 사진촬영에 의존해오고 있다. 이럴 경우, 조사에 많은 노력과 시간이 소 요되고 조사결과는 각 조사자 개인의 판단능력에 주로 좌우 되어 조사자가 바뀌면 일관성 있는 조사결과 수집에 한계가 있게 된다. 또한, 조사 정밀도 향상과 방대한 량의 데이터 보존·관리 어려움이 예상된다. 이와 같은 문제를 해결하기 위해 선진국에서는 육안조사를 자동화/영상화 하기위해 많은 연구노력을 기울여 왔고, 그 결과, 최근에는 많은 기술적 성
과를 내놓고 있다. 특히, 일본의 경우는 터널라이닝변상추적 장치(筑摩榮 등 1997)와 자동균열해석시스템(寺田啓治 등
1998) 등을 개발하여, 이미 현장에서 활용하고 있다.
국내에서도 각종 기관(한국건설기술연구원 1998, 한국철도 기술연구원 1998, 1999, 한국철도기술공사 1999)과 기업 (대우건설기술연구소 1998)에서 이와 관련한 다양한 연구가 수행된 바 있다. 학계에서도 화상처리기술을 이용하여 균열 등의 결함을 자동화 검출하려는 연구가 수행되어지고 있다 (국내 : 강준묵 등 2002, 김정용 등 2002, 이방연 등 2003,
2005, 국외 : Otsu 1979, Ito 등 2002, Liu 등 2002, Schutter
2002 등 다수).
이와 같이 국내에서도 각 기관이나 업체별로 최근 들어 점검분야의 기계화는 부분적으로 이루어지고 있으나, 외관조
*정회원·교신저자·대전대학교 공과대학 토목공학과 부교수 (E-mail : [email protected])
**(주)서영엔지니어링연구소장 (E-mail : [email protected])
사의 경우, 검사결과의 객관성 결여와 데이터 관리 면에서 아직은 많이 부족한 실정이다. 학계의 연구는 주로 균열 등 의 형상 정량화 추정을 위한 자동화 알고리즘개발에 좋은 성과를 얻고 있으나, 아직 현장 구조물에 직접 개발 장비를 시스템화 및 자동화하여 적용한 사례는 보고되고 있지 않다.
따라서 실제 터널 구조물의 육안조사를 대체할 수 있고, 객 관적인 정보를 얻을 수 있으며, 장대 터널, 대 단면 터널 등과 같이 시간적, 공간적 제약에서도 벗어나 적용이 가능한 각종 결함의 자동화 인식 시스템의 개발이 절실히 요구되고 있다.
본 연구에서는 이와 같이 터널 외관상의 결함을 자동인식 할 수 있는 장비 및 시스템을 개발하는데 목적이 있으며, 개발 대상 자동화 시스템은 Fig. 1에 나타낸 바와 같이 데 이터 획득장치, 손상인식 시스템, 데이터 관리·분석 시스템 으로 구성되어 있다. 이들 중, 핵심기술 S/W인 균열 등에 대한 손상인식 시스템과 데이터 관리·분석 시스템을 중심 으로 주요 연구개발 내용을 소개하고자 한다.
2. 측정 및 해석 방법
2.1 손상인식시스템
본 연구에서 개발하고자 하는 손상인식 알고리즘은 획득된 영상에서 손상을 추출하여 전문가가 판단할 수 있도록 그 손상을 적절한 물리량으로 묘사하는 방법을 의미한다. 즉, 손 상인식 알고리즘은 손상추출 알고리즘과 손상측정 알고리즘 으로 구성된다. 본 논문에서는 여러 손상형태 중 콘크리트 터널 라이닝의 균열을 중심으로 손상인식 시스템의 개발내 용을 설명하고자 한다. 대개 의사결정이 그렇듯이 여기에는 적용 대상과 목적에 대한 충분하고 명료한 지식베이스가 필 요하다. Fig. 2는 이러한 손상인식 시스템을 도식적으로 나 타낸 것이다.
영상을 수학적인 관점으로 보면 광도와 좌표를 갖는 화소 의 집합으로 볼 수 있다. 손상추출이란 그 전체집합에서 손
상이라고 판단되는 화소의 부분집합을 정의하는 것이라고 볼 수 있으며, 이러한 과정을 영상분할이라고 한다. 즉, 영상을 관심 있는 부분과 그렇지 않은 부분으로 나누는 과정이다.
영상분할은 뒤따라 올 처리된 데이터의 해석을 위해 매우 중요한 과정인 반면에 노이즈를 동반한 영상데이터의 모호 성으로 인해 가장 어려운 과정이기도 하다.
영상분할을 위해서 가장 쉽게 고려할 수 있는 방법은 특 정값을 기준으로 그 값보다 크면 배경으로 표시하고, 작거나 같으면 물체로 표시하는 것이다. 그러나 가장 많이 사용되는 이 방법은 영상이 조금 복잡해지면 이 방법으로는 만족할 만한 결과를 얻기 어렵다. 특히, 터널 벽면과 같이 조명이 균일하지 않고 얼룩이나 기타 시설물 등의 밝기분포를 변화 시키는 다양한 요인들이 존재하는 환경에서 하나의 밝기를 기준으로 손상과 배경을 분리하기에는 상당한 무리가 따른다.
따라서 본 연구에서 개발하려는 시스템은 손상과 비손상의 대비를 극대화하기 위해 히스토그램을 이용한 필터링을 하 고, 영상분할방법으로서 영상의 지역적인 정보를 통해 모서 리를 추출하고 그 추출된 모서리를 통해서 영역을 구성하는 방법을 적용하였다. 그 후, 구성된 각각의 영역에 대해 고유 한 식별자를 부여하고, 각 영역의 기하학적 특징형상을 계산 하여 손상과 비손상을 판단하였다. 이상의 과정을 각 방법별 로 나누어 구체적으로 설명하면 다음과 같다.
2.1.1 측정 알고리즘을 통한 손상제원의 획득기술
1) 필터링 알고리즘(히스토그램 슬라이싱과 스트레칭) Fig. 1 Composition of Automatic Recognition System
Fig. 2 Algorithm of Crack Recognition
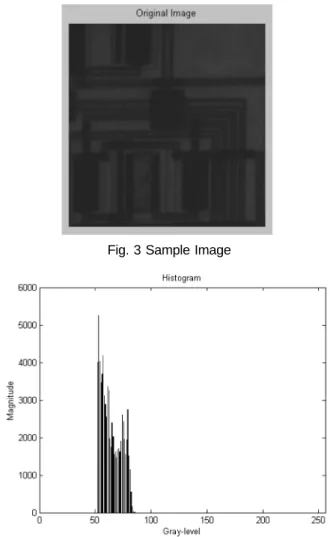
Fig. 3 Sample Image
Fig. 4 Histogram of Fig. 3
명암의 특성은 히스토그램으로 표현 할 수 있다. 영상처리 에서 사용되고 있는 히스토그램은 디지털 이미지의 각 픽셀 에 해당하는 그레이레벨 값의 분포를 그래프로 표현한 것이 다. 따라서 히스토그램은 각 그레이레벨 값에 해당하는 픽셀 개수를 그래프로 표현해 준다.
Fig. 4는 Fig. 3의 히스토그램이며, Fig. 4에서 히스토그램
은 가로축으로 0에서 255(8bit-gray scale)까지의 명암(그레 이레벨)정보를 가지고 있고, 세로축으로 각 그레이레벨에 해 당하는 픽셀개수를 보여주고 있다. 영상의 전체적인 명암은 히스토그램의 그래프 막대들의 편중된 점을 보면 알 수 있 다. 그래프 막대들이 전체적으로 오른쪽으로 치중되어 있으 면 영상은 높은 명암 값을 갖고 있고, 좌측으로 치중되어 있으면 낮은 명암 값을 갖고 있는 것이다.
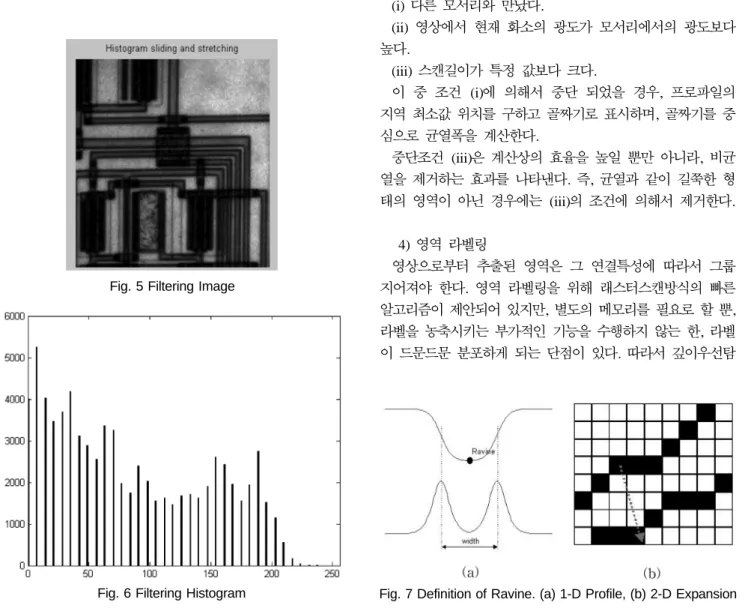
그래프 막대들이 임의의 기준을 중심으로 좁게 모여 있으 면 대비가 낮은 것이고, 그래프 막대들이 넓게 분포되어 있 으면 대비가 높은 것이다. 대비가 낮으면 낮을수록 사람의 눈으로 영상내의 차이점을 구별하기 힘들어 진다. 따라서 콘 트라스트 스트레칭을 이용하여 영상의 질을 향상시킬 수 있 다. 콘트라스트 스트레칭은 전체 스케일(0~255)에서 가장 높 은 값(255)을 히스토그램에서 가장 높은 값으로 나눈 값을 각 픽셀에 곱해주면 된다. Fig. 5와 6은 콘트라스트 스트레 칭을 통하여 향상된 영상과 히스토그램을 보여준다. 따라서 콘트라스트 스트레칭을 이용하여 영상 내에서 손상과 비손 상의 대비를 높일 수 있다.
2) 모서리 검출
영상처리 관점에서 모서리 검출은 영상 내에서 광도의 변 화가 심한 지점에서 발생하는데, 이는 영상의 밝기가 낮은 값에서 높은 값으로 또는 높은 값에서 낮은 값으로 변하는 지점에 존재하기 때문이다. 본 연구에서 채택한 라플라시안 연산자는 모서리일 경우, 그 방향에 관계없이 큰 값을 갖게 한다. 그러므로 라플라시안 연산자는 다른 기법들보다 더욱 두드러진 모서리를 출력할 수 있고, 출력된 모서리는 양의 밝기경사와 음의 밝기경사를 포함한다.
3) 모서리로부터 영역 구성
앞서 추출된 모서리로부터 영역을 구성하는 알고리즘을 설 명한다. 영역은 실제로 영역이 아니라 골짜기를 구성한다. 영 역으로 구성하였을 경우, 구획의 연속성이 더욱 안정적으로 보장되는 장점이 있지만, 시각화 및 균열길이 계산을 위해 골격화라는 비교적 계산비용이 높은 모폴로지 연산을 반복 적으로 해야 하는 문제점이 있다. 또한, 불연속성이 발생하 는 문제는 근접영역 연결을 통해 다소 해결할 수 있다. 골 짜기는 Fig. 7(a)와 같이 두 모서리 사이에서 지역 최소값을 갖는 점으로 정의하였다. Fig. 7(b)는 2차원 영상의 경우 모 서리 방향으로 스캔하여 (a)와 같은 1차원 프로파일을 얻을 수 있다.
한 모서리에서 그 모서리의 기울기 반대방향으로 스캔하면 서 다음과 같은 조건을 만족하면 스캔을 중단하였다.
(i) 다른 모서리와 만났다.
(ii) 영상에서 현재 화소의 광도가 모서리에서의 광도보다
높다.
(iii) 스캔길이가 특정 값보다 크다.
이 중 조건 (i)에 의해서 중단 되었을 경우, 프로파일의 지역 최소값 위치를 구하고 골짜기로 표시하며, 골짜기를 중 심으로 균열폭을 계산한다.
중단조건 (iii)은 계산상의 효율을 높일 뿐만 아니라, 비균 열을 제거하는 효과를 나타낸다. 즉, 균열과 같이 길쭉한 형 태의 영역이 아닌 경우에는 (iii)의 조건에 의해서 제거한다.
4) 영역 라벨링
영상으로부터 추출된 영역은 그 연결특성에 따라서 그룹 지어져야 한다. 영역 라벨링을 위해 래스터스캔방식의 빠른 알고리즘이 제안되어 있지만, 별도의 메모리를 필요로 할 뿐, 라벨을 농축시키는 부가적인 기능을 수행하지 않는 한, 라벨 이 드문드문 분포하게 되는 단점이 있다. 따라서 깊이우선탐 Fig. 5 Filtering Image
Fig. 6 Filtering Histogram Fig. 7 Definition of Ravine. (a) 1-D Profile, (b) 2-D Expansion
색방법을 통해 각 영역을 라벨링 하였다. 이는 되부름 함수 를 통해서 쉽게 구현할 수 있으며, Fig. 8은 전형적인 라벨 링 양상을 보여주고 있다.
5) 근접영역 연결
앞서 모서리로부터 골짜기를 추출할 때, 영역이 아니기 때 문에 구획의 연결성이 다소 떨어질 수 있음을 지적하였다.
이는 라벨링에서 서로 같은 영역임에도 불구하고 서로 다른 라벨을 가지게 하고, 따라서 뒤이어 올 특징형상 계산에 영 향을 미치게 된다. 단적인 예로서, Fig. 9(a)에서 오른쪽 아 랫부분의 노이즈를 제거하기 위해서 길이가 특정 값 이하인 구획은 노이즈에 의한 것으로 보고, 이를 버리는 규칙이 있 다고 가정하자. 아래 그림에서 보는 바와 같이 중간 중간에 끊어져 나타난 균열 때문에 적용하기가 어렵다는 것을 알 수 있다. Fig. 9(b)에는 다른 문제점을 보이고 있는데, 실제 이러한 문제점을 해결하기 위해서 각 구획의 양 끝점에 대 해서, 끝에서 특정개수의 화소를 직선으로 모델링하여 기울 기를 구하고 기울기 방향으로 방향 변화율이 미소하면 이를 하나의 직선으로 정의하였다.
6) 특징형상 계산
앞에서 설명한 단계에서 추출된 모든 구획이 균열에 의해 서 나타난 것은 아니다. 시공단차에 의한 것일 수도 있고, 작업자가 인위적으로 한 마크일 수도 있다. 또한 노이즈나 얼룩에 의한 것일 수도 있다. 이러한 잘못된 구획은 제거되 어야 한다. 손상과 비손상을 구분하기 위해서 각 영역의 기 하학적 특징형상을 구하고, 이를 바탕으로 다음과 같이 정의 하였다.
(i) 매우 작은 구획은 노이즈에 의한 것이다.
(ii) 길쭉하지 않은 구획은 누수와 같은 얼룩에 의한 영향
이다.
(iii) 너무 곧은 구획은 시공단차나 전선과 같은 부착물에
의한 것이다.
조건 (i)에서 작다는 의미는 길이가 짧다는 의미이다. 구획
의 길이는 그것을 구성하는 화소개수로써 쉽게 얻을 수 있 다. 조건 (ii)는 모서리로부터 골짜기를 구성할 때 스캔길이 에 제한을 둠으로써 구현하였다. 조건 (iii)은 구획을 직선으 로 가정하여 그 추정오차를 계산함으로써 구현할 수 있다.
7) 균열(길이, 방향, 폭) 측정
지금까지 균열은 화소의 집합으로써 표현되었다. 하지만 이 러한 표현방법은 정밀안전진단과 같은 상위수준의 의사결정 에 쓰이기에는 부적합하다. 따라서 본 연구에서는 균열길이, 균열방향, 균열 폭이라는 세 가지 물리량으로 균열을 표현하 였다.
균열길이는 화소개수로 쉽게 계산될 수 있다. Fig. 10은 균열길이의 결정을 보여준다. 즉, 대각선방향의 길이는 , 수직수평방향의 길이는 1로써 계산하였다.
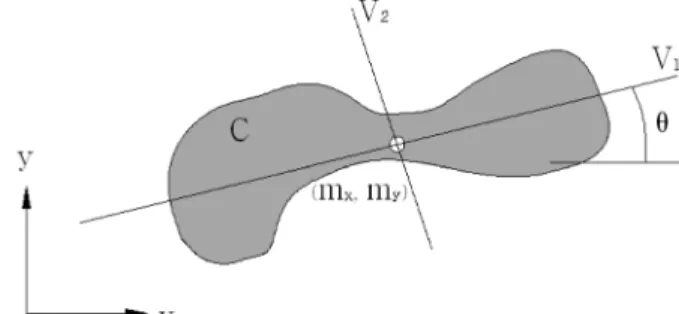
균열방향은 균열상의 점을 직선으로 조정하여 그 기울기를 통해서 구할 수 있다. 극좌표 방식의 직선모델은 표준형보다 계산상의 안정성뿐만 아니라, 통계적으로 더 나은 특성을 보 여준다. 즉, 수직에 가까운 직선도 잘 표현할 수 있을 뿐만 아니라, x-좌표와 y-좌표 모두에 불확실성을 고려한 모델이 된다(Fig. 11). 또한 이러한 방법은 관성모멘트 행렬을 구성 하여 그 행렬의 주축방향을 통해서 구할 수 있다. 이 방법 은 서로 똑 같은 내용을 다르게 표현한 것임을 알 수 있다.
관성모멘트를 통한 직선추정을 통한 균열방향의 결정은 다 음과 같다.
화소의 집합 C로 주어진 구획의 관성모멘트는 다음 식(1) 과 (2)와 같이 정의된다.
(1)
(2)
여기서 mx, my는 C의 도심위치로서 다음 식(3)과 (4)와 같 이 정의된다(N은 데이터의 끝점을 의미함).
2
Ixx (xi–mx)2
i 1= N
∑
xi2–Nmx2i=1 N
∑
= =
Iyy (yi–my)2
i 1= N
∑
yi2–Nmy2i=1 N
∑
= =
Fig. 8 Labelling of Image
Fig. 9 Crack Segment
Fig. 10 Determination of Crack Length
Fig. 11 Determination of Direction using Main Axis
(3)
(4)
그리고 관성모멘트 행렬 식(5)로부터 관성모멘트 행렬을 대각선화 하는 회전변환을 구함으로써 균열방향을 얻을 수 있다. 이는 전형적인 고유값 문제로서 풀 수 있다.
(5)
균열 폭(두께) 계산은 Daugman의 방법을 각 픽셀에서의 기울기값으로 적용하여 임의 곡선 또는 직선에 대해서도 적 용될 수 있도록 변형한 방법을 이용하였다. 이를 위해서 균 열길이와 균열방향(기울기), 그리고 휴리스틱(heuristics) 알고 리즘을 종합적으로 사용하였다.
휴리스틱 알고리즘에 의하여 추출된 균열 그래프를 시작점 을 1로 끝점을 N으로 표현하는 경우, 균열 중심선을 기점 으로 폭을 계산할 수 있다. 선택된 영역에서 균열 폭을 계 산하기 위해 휴리스틱으로 균열기울기를 따라서 그래프의 x 축에 대한 폭을 계산하여, 평균을 내는 방식으로 균열 폭을 계산한다. 각 중심픽셀에서의 기울기를 사용하여 x, y축에 계 속적으로 수정/변경하기 때문에 결과적으로 하나의 긴 수직선 형태에서 균열 폭을 계산하는 방식으로 귀착될 수 있다.
균열 중심선에 해당하는 픽셀(휴리스틱 알고리즘에 의해 검출된 균열패턴)을 기준으로, x축에 해당하는 2P개의 픽셀 을 추출하여 픽셀집합을 구성하며, y축을 기준으로 1부터 N 까지의 범위 내에서 각 픽셀의 변화량을 누적값으로 계산한 다. 중심선을 기준으로 좌, 우측에 해당하는 픽셀(wlefti,
wrighti)에서의 누적값을 식(6)과 식(7)에서처럼 독립적으로 계
산하여 균열 폭의 시작점과 끝점을 추출해 낸다.
(6)
(7)
여기서, mx: x축에 대한 균열중심좌표 my: y축에 대한 균열중심좌표 x : x축에 대한 픽셀좌표 y : y축에 대한 픽셀좌표
이렇게 하여 누적된 wlefti와 wrighti 값 중에서 최대값을 추 출하면, 균열 경계면에서는 상대적으로 다른 영역에서보다 더 큰 값을 찾아낼 수 있기 때문에, 이 지점을 균열의 시작 혹은 끝점으로 간주할 수 있다.
여기서, P값은 고정된 값이 아니라 사용자가 그 값을 임의 로 선택할 수 있는 값이다. 한 균열의 폭 측정을 위한 화소 값의 비교회수는 「2P × 균열길이」이다. 따라서 측정범위 (P값)가 증가할수록 그 측정범위에 비례하여 연산회수가 증 가하고, 자연적으로 시스템 속도가 저하된다. 또한, 폭이 작 은 미세균열의 경우, 영상 노이즈로 인하여 측정범위를 넓게 하면 할수록 폭 값 검출에 대한 오차 발생률이 증가한다.
그래서 본 시스템에서는 사용자로 하여금 검출 할 수 있는 균열의 최대 폭 값을 지정(픽셀수를 길이로 환산하여 1
mm, 3 mm, 5 mm, 10 mm로 고정)하여 시스템 속도를
향상시키고, 오차 발생률을 감소시켰다.
2.1.2 손상추출을 위한 반자동화 GUI(Graphical User
Interface)
이상에서 설명한 방법은 손상을 완전자동으로 인식하는 것 을 목표로 하지만, 실제상황에서는 실패할 경우가 많다. 예 를 들면, 인식하지 못한 손상이 있을 수도 있고, 손상으로 잘 못 인식된 영역도 있을 수 있다. 이러한 경우, 사용자의 간섭으로 손상을 인식/제거할 수 있는 알고리즘도 필요하다.
따라서 측정 시 오차가 가장 많이 나타날 수 있는 균열과 같은 손상에 대해서는 그래프 탐색방법을 통해 사용자가 제 공한 균열상의 두 점을 통해서 세부균열을 추출하는 반자동 알고리즘의 구현과 영역내 노이즈에 대한 보정 알고리즘을 포함하도록 하였다.
이를 위해, 영상 화소를 그래프의 노드로 보고, 이웃에 있 는 여덟 개의 화소는 연결된 노드이며, 균열 특성상 이전 노드와의 연결로부터 방향 변화가 급하지 않은 세 개의 노 드만 연결된 노드로 Fig. 12와 같이 정의하였다(0o≤q<90o).
이로부터 A-algorithm을 적용하여 최적해를 찾고, 계산시간 을 줄일 수 있도록 휴리스틱이론을 활용하였다.
2.1.3 오차보정 알고리즘을 통한 정밀영상 처리방법
터널 라이닝의 영상을 획득한 후, 필요한 균열크기를 측정 하기 위한 화상처리에서 획득영상의 흔들림이나 초점의 부 정확성 등에서 오는 오차뿐만 아니라, 영상농도 정도에 따른 오차도 보정되어야 한다. 이를 위하여 본 연구에서 개발한 시스템에서는 균열 평균농도를 계산하여 평균농도가 특정값 이하인 균열에 대해서는 측정결과(균열 폭값)를 보정할 수 있게 하였다.
1) 손상인식 프로그램 (TIPS-IP 프로그램)
손상인식 프로그램은 영상데이터 획득시스템에서 얻은 터 널영상으로부터, 손상을 정확하게 파악하고, 정량화할 수 있 는 이미지프로세싱 알고리즘을 통해 개발하였다. 프로그램은
Visual C++로 제작하였고, 적용시킨 화상처리 알고리즘은 연
구결과를 바탕으로, 영상 이치화, 영상 완화, 컴퓨터 시각시 스템 측도설정 및 기하학적 특징추출 등과 같은 기존의 효 율적인 화상처리 알고리즘을 접목시켜, 손상측정과 영상보정 mx 1
N---- xi
i=1
∑
N=
my 1 N---- yi
i=1
∑
N=
A Ixx Ixy Ixy Iyy
=
wlefti I m( x+x m, y+y) y P x 0d , (– ≤ < )
1
∫
N=
wrighti I m( x+x m, y+y) y 0 x Pd, ( ≤ ≤ )
1
∫
N=
Fig. 12 Pixel and Graph
알고리즘의 정확도와 검출속도를 더욱 업그레이드하여, 보다 정확한 손상인식 결과를 얻을 수 있도록 하였다. 또한, 대용 량 파일에 대한 처리능력과 Windows의 ODBC 인터페이스 를 통한 DB기능을 추가하여, 데이터베이스시스템과의 손쉬 운 연계가 가능하도록 하였고, 프로세싱 영상의 Zoom in/
out 및 네비게이션 기능을 포함함으로써, 프로그램 인터페이 스와의 편의성을 최대로 고려하였다.
2) 손상 화상처리
데이터획득 시스템에서 획득한 터널영상에서 균열이나 누 수 등의 손상을 자동으로 처리하는 것으로, Table 1과 같은 기능과 데이터를 수집할 수 있도록 하였다.
3) 손상 맵 프로그램 (TIPS-ME 프로그램)
손상 맵 프로그램은 손상인식 프로그램에서 처리된 결과 값을 외관조사용 데이터로 활용하기 위한 프로그램이다. 손 상인식 프로그램으로부터 생성된 손상데이터를 구조물의 외 관조사용 데이터로 활용하기 위해서는 구조물의 특정부분 과 길이에 따라 프로그램에서 처리된 손상데이터를 모두 나타내어, 점검구조물의 모든 손상현황을 정확하게 파악할 수 있도록 하여야 한다. 따라서 손상인식 프로그램에서 화 상처리 된 다수의 손상데이터를 실제구조물의 축척과 비례 하여 하나의 처리결과로 값을 재구성한 후, 구조물의 전체 손상현황을 모델링하여 나타내는 TIPS-ME 알고리즘을 개 발하였다. 또한, 여러 영상데이터를 통합하는 과정에서 발 생하는 데이터간의 중복부분을 빠르게 처리하기위한 이미 지 중복처리 알고리즘을 적용하여, 손상맵 프로그램을 개 발하였다.
3. 데이터관리·분석 시스템
데이터 관리·분석 시스템은 손상인식 시스템에서 인식된 손상데이터를 체계적으로 정리하고 관계된 자료들 간의 유 기적인 연결과 관리를 위한 시스템으로서, 구조물의 여러 가 지 손상데이터를 관리하고, 유지관리를 위한 제반 수단과 방 법 및 방침에 관한 의사결정을 체계적으로 지원하는 컴퓨터 정보시스템을 의미한다. 따라서 데이터 관리·분석 시스템은 손상데이터의 저장을 위한 데이터베이스 시스템과 관리·분 석을 위한 응용 프로그램으로 구성된다.
3.1 DB 시스템
손상 DB설계를 바탕으로 손상인식 시스템에서 생성되는 균열, 박리, 박락, 누수, 백태의 크기와 길이 및 좌표 등과 같은 모든 손상데이터를 저장할 수 있으며, 점검 구조물의
손상분석 데이터 등을 저장할 수 있게 DB를 확장시켜, 보 다 체계적인 데이터의 보관과 관리가 가능하도록 개발하였 다. 또한, DB의 호환성과 향후 확장성 등의 유지관리 부분 을 최대한 고려, Windows의 ODBC 인터페이스를 사용함으 로써 호환이 가능하도록 하였다.
3.2 데이터관리·분석프로그램
데이터 관리·분석 프로그램은 DB에 저장된 손상데이터 를 체계적으로 관리하고 분석할 수 있는 프로그램으로서, DB 시스템과 함께 데이터 관리·분석 시스템의 구성요소이 다. 특히, 이 프로그램은 저장된 여러 구조물의 손상데이터 와 유형 및 설계자료, 시공자료, 이력자료 등을 손쉽게 검색 하고 조회할 수 있으며, 구조물 손상에 대한 상태평가와 분 석알고리즘을 개발 적용하여, 손상인식 프로그램에서 처리된 데이터를 체계적으로 분석할 수 있다.
손상데이터 분석에 사용된 손상분석 알고리즘은 손상원인 에 대한 이론 및 경험적 근거 내용을 바탕으로 하여 분석하 는 알고리즘이며, 작용요인을 외적요인과 내적요인으로 분류 하여 결과를 도출해내도록 하였다. 여기에 균열손상의 경우 는 따로 밀도, 구간별 밀도, 최대/평균 균열 및 시간 진행성 을 분석할 수 있도록 구성하였으며, 끝으로, 모든 손상 분석 결과와 데이터는 Microsoft사의 EXCEL 프로그램용 파일로 도 출력할 수 있도록 하였기 때문에, 폭넓은 데이터의 호환 성과 편의성을 가지고 있다.
4. 측정및 해석결과
이상의 방법을 이용하여, 실제 터널구조물에 대해 점검 측 정 적용한 대표적 사례와 그에 대한 해석결과를 정리하여 Table 1. Kinds of Damage Data
항 목 설 명
손상 ID 각각의 손상에 대한 ID를 생성하며 DB에 저장 손상제원 손상의 길이, 두께, 면적
손상종류 균열, 누수, 백태, 박리, 박락, 철근노출 등 손상좌표 손상이 시작되는 좌표와 끝나는 좌표
Fig. 13 Expression of Damage Map. (a) Case 1, (b) Case 2
보았다.
4.1 손상맵 프로그램해석결과
먼저 균열이외에도 각종 결함에 대한 손상 맵 프로그램 해석결과 예를 Fig. 13(a), (b)에 영상으로 각각 나타내었다.
본 해석결과에서 보는 바와 같이 측정결과로부터 각종 결함 에 대한 손상 종류와 위치, 크기(면적) 등을 선별하여 해석 할 수 있음을 확인할 수 있다.
4.2 손상 맵및손상리스트
다음은 균열손상 검출에 대해 적용한 사례로서, Fig. 14에 서와 같이 균열 맵 및 손상리스트를 나타내었다.
Fig. 14 Crack Map and List (crack size is represented by color)
Fig. 15 Analysis of Crack Data. (a) Crack Length, (b) Crack Density
Fig. 16 Analysis and Assessment of Crack Data. (a) Comparative Analysis of Original Image and Crack Map, (b) Analysis of Crack Map according to Elapsed Time
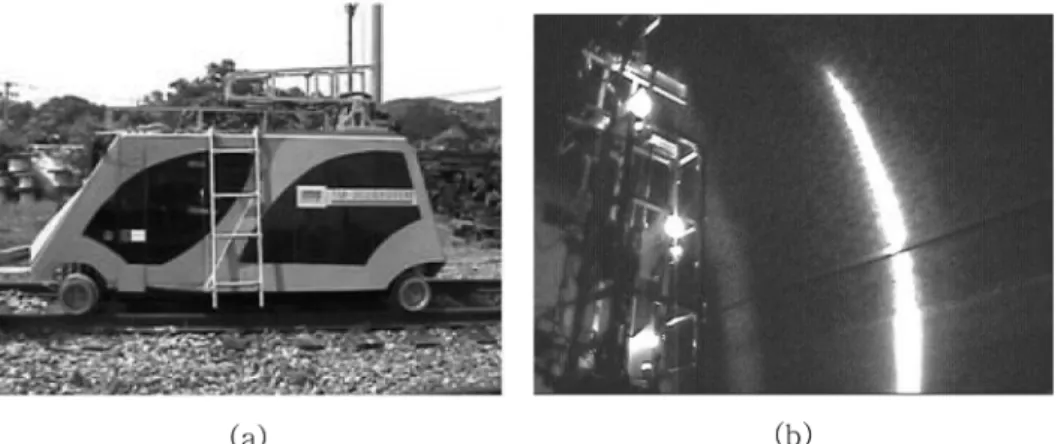
Fig. 17 Automatic Measurement System and Application Case on Tunnel Lining. (a) Automatic Measurement System, (b) Application Case
4.3 손상데이터의분석 및평가
균열손상 검출의 데이터 분석 평가시스템에서는 Fig.
15(a), (b)에서는 균열손상 데이터의 분석사례(균열 길이와
밀도분포)를 나타내었고, Fig. 16(a), (b)에서는 구조물의 균 열상황을 한눈에 파악할 수 있도록 균열 맵, 구조물 위치에 따른 균열 밀도 및 시간에 따른 진행성을 균열 타입별로 영 상화하고 분석하여 균열 원인 등을 제시하였다.
참고로, Fig. 17에는 이상에서 개발한 S/W를 정착하여 제 작한 자동화 계측 시스템 장비(H/W)와 이를 이용한 현장 터널라이닝 계측장면을 나타내었다. 본 연구에서 나타낸 모 든 영상과 해석결과는 본 시스템 장비를 이용하여 실제 국 내 터널 현장에서 자동으로 계측하여 얻은 결과이다.
5. 결 론
이상에서 얻어진 연구 성과로부터 결론을 정리하면 다음과 같다.
1. 본 연구에서 구체적인 설명은 생략하였지만, 개발한 자동 화 시스템의 H/W는 터널 외관조사의 특징을 측정하고 분 석 가능한 영상데이터 획득장치를 포함하여, 터널 검사대 상 평면에 대한 위치이동 및 각도조종 기능과 다축 제어 기를 이용한 정밀구동장치로 구성된다. 여기에 해석 S/W 가 포함된 본 시스템은 실제 철도터널 구조물에 적용하여 성공적인 운용이 가능함을 확인 할 수 있었다.
2. 본 연구에서 개발한 S/W는 상기 H/W로부터 측정하여 얻은 데이터를 손상인식 모델로부터 알고리즘을 구현하여 영상처리화한 손상인식 시스템(필터링 알고리즘, 손상모델 링, 손상계측·보정 알고리즘 및 가시화프로그램으로 구 성)을 연구 개발하여, 균열, 박리, 박락, 누수, 백태 등의 손상에 대한 자동화 손상인식이 가능하도록 하였다. 이와 더불어 손상의 크기와 길이 및 좌표 등을 포함한 모든 손상데이터와 분석데이터를 점검 구조물별로 DB화가 가 능한, 보다 체계적인 데이터 보관과 관리 시스템도 추가로 연구 개발하였다.
3. 본 연구의 주된 성과는 이상과 같이 구조물의 손상상태 점검을 위한 데이터 획득, 손상인식, 데이터 관리·분석기 능 까지를 하나의 시스템으로 통합하고, 자동화 한 것이다.
이를 통해, 국내 최초로 현장 콘크리트 터널라이닝부의 결 함 외관조사를 기계화·자동화 하는 기반을 조성하였다.
감사의글
본 연구는 한국건설교통기술평가원(KICTEP)의 연구지원금
에 의해 수행된 것으로 이에 감사드립니다.
참고문헌
강준묵, 오영철, 엄대용(2002) 수치영상처리에 의한 콘크리트 구 조물의 균열정보 획득, 대한토목학회논문집, 대한토목학회, 제 22권 제5-D호, pp. 1001-1010.
김정용, 조윤호(2002) 이미지프로세싱기법을 이용한 균열인식 알 고리즘 및 프로그램 개발, 대한토목학회논문집, 대한토목학회, 제22권 제4-D호, pp. 639-647.
대우건설기술연구소(1998) 터널 안전관리를 위한 정밀 안전진단 시스템개발, 과학기술부.
이방연, 김진근, 박석균(2003) 화상처리기법을 이용한 균열 검출 에 관한 연구, 한국콘크리트학회 2003년도 가을학술발표회 논문집, 한국콘크리트학회, 제15권 제2호, pp. 655-658.
이방연, 김윤용, 김진근(2005) 개선된 이진화와 형상분석 기법을 응용한 콘크리트 표면 균열의 화상처리 알고리즘 개발, 한국 콘크리트학회 논문집, 한국콘크리트학회, 제17권 제3호, pp.
361-368.
이찬영, 정해문, 김옥선(2004) 화상처리기법을 이용한 강교 도장 의 도막진단엔진 개발, 대한토목학회 2004년도정기학술대회 논문집, 대한토목학회, pp. 3952-3957.
한국건설기술연구원(1998) 터널의안전진단체계정립및균열자 동측정시스템개발(I), 한국건설품질관리공단연구원.
한국철도기술연구원(1998) 철도터널유지관리시스템 구축(1단계), 철도청.
한국철도기술공사(1999) 고속전철교량/터널구조및유지관리시 스템개발 (터널부문) 보고서, 건설교통부.
한국철도기술연구원(1999) 고속철도선로구축물성능확보를위한 터널계측및평가시스템개발(II), 한국고속철도건설공단.
(주)MOI, 대전대(2005)터널안전진단을 위한외관 및 내부결함 자동인식시스템개발, 한국건설교통기술평가원.
筑摩 榮 外(1997) トンネル覆工變狀を追跡する, 日本土木學會誌, Vol. 82.
寺田啓治 外(1998) 自動ひびわれ解析システム, 日本土木學會誌, Vol. 83.
Otsu, N.A. (1979) Threshold selection method from gray level his- togram, IEEE Transactions on Systems, Man, and Gybemetics, Vol. SMC-9, No. 1, pp. 62-66.
Ito, A., Aoki, Y., and Hashimoto, S. (2002) Accurate extraction and measurement of fine cracks from concrete block surface image, IEEE Industrial Electronics Society, Vol. 3, pp. 2202-2207.
Liu, Z., Suandi, S.A., Ohashi, T., and Ejima, T. (2002) A Tunnel Crack Detection and Classification Systems Based on Image Processing, Proceedings of SPIE - The International Society for Optical Engineering, No. 4664, pp. 145-152.
Schutter, G.D. (2002) Advanced monitoring of cracked structures using video microscope and automated image analysis, NDT &
E International, Independent Nondestructive Testing and Eval- uation, Vol. 35, No. 4, pp. 209-212.
(접수일: 2008.9.2/심사일: 2008.9.26/심사완료일: 2008.10.14)