서론 I.
(disturbance observer) 1987 K. Ohnishi [1].
[2], [3-5], [6]
. 1
.
, , .
,
.
,
.
Q- .
.
,
.
,
* (Corresponding Author)
: 2011. 8. 1., : 2011. 9. 20., : 2011. 10. 7.
2011
(No. 2011-0026456)
(KETEP)(No. 20093021020030) .
.
[7] .
. [8] (
) [9] ( )
. [8]
. .
[8]
.
. . II
. III
. IV
.
Design of Nonlinear Disturbance Observer Guaranteeing Global Stability and Robust Stability Condition
*,
(Juhoon Back1 and Hyungbo Shim2)
1Kwangwoon University
2Seoul National University
Abstract: A nonlinear version of disturbance observer is presented. The system under consideration is an uncertain single input single output nonlinear system and the nominal plant is also a nonlinear system. Compared to the previous implementation given in [8], the proposed scheme does not require an auxiliary variable anymore, thus it has a simpler and more intuitive structure. A robust stability condition for the overall closed-loop system is also provided.
Keywords: disturbance observer, robust control, nonlinear system
Copyright© ICROS 2011
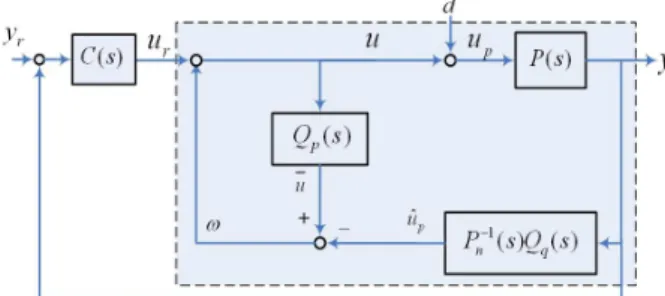
1. .
Fig. 1. Structure of classical disturbance observer.
표기법: ,
∈× .
,
.
. 문제 정의 및 가정 II.
.
(1)
∈ , ∈ ,
∈ .
(smooth) (global Lipschitz)
. ∈
.
(1) .
(2)
∈ .
. (2)
.
(3)
∈ , ,
, ,
.
(4) -
(inner-loop)
∈
(4)
(5)
(2) (3)
. , (5)
(1), (3) (
), (4) .
.
가정 1:
.
≤ ≤ ≤ ≤ ∀∈ .
가정 2: (2) (3)
≡ (globally
exponentially stable)
.
≤ ≤
≤
∥
∥
≤ .
주요 결과 III.
(1) -
. 제안된 외란 관측기 구조 1.
1
- .
.
, - .
⋯
(III. 2
).
∈
.
⋯
. ,
[8,9]
.
(2) (
) .
( ) , (
) .
(6)
. (6)
. , -
(high-gain observer) [10]
.
.2 ( 1 2
).
1
.
[8,9]
.
. [8,9]
( )
.
. ,
. 강인 안정도 조건 2.
(7)
(standard singular perturbation form) .
(7)
보조 정리 1: (7) (8)
(9) .
(8)
⋯
(9)
⋯ ,
, .
증명: , .
.
(10) (9)
.
.
.
.
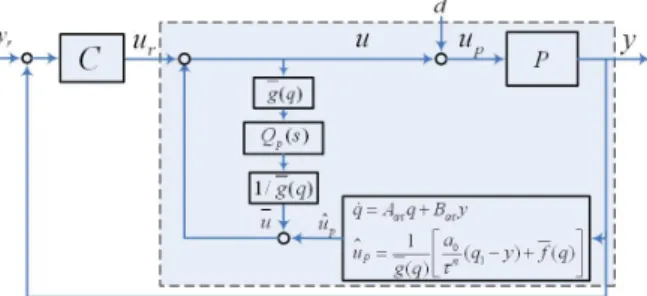
2. .
Fig. 2. Proposed nonlinear disturbance observer.
.
.
⋯
⋯
⋯
,
.
⋯
, (10) (9)
.
(9)
. ,
(
).
(reduced system)
[10].
,
(boundary layer system)
. ,
.
⋯
, .
′
′
⋯
(11) , ′
. ⋅′ ⋅ . 보조 정리 2: .
(11)
.
1) ⋯ .
2) ≤ ≤
⋯ .
증명: 1) ,
2) .
주목 1: 2
[8,9]. . 1)
⋯
. 2) ⋯
⋯ . 3)
⋯
(Nyquist plot)
. 2) 3)
. 2) (circle
criterion) [10]
.
주목 2: (11)
(sector)
.
′ ⋯
= ≤ ≤
⋯
1
[10, Section 7.1]. , strictly positive real .
.
′
= ≤ ≤
⋯ . ,
. ,
strictly positive real ,
, , ,
[10, Lemma 6.3].
(12)
.
, ,
(quasi-steady-state system)
(2)-(3) .
.
가정 3:
.
≤
≤ .
≤ ∀
≤ ∀ , .
. ,
.
정리 2: 1,2,3 .
(11) ,
(5) ( , ≡ ≡
).
증명:
. (9) (
) .
⋯
⋯
.
.
≡
( 2),
(symmetric positive definite) ,
2 (12)
.
.
.
. .
≤
≤
,
≤ ≤ .
≤
(12) (
).
≤
≤
1 3 .
≤
,
.
, ≡ ≡ ,
(negative definite) .
결론 IV.
.
. ,
.
.
. [11,12]
. 참고문헌
[1] K. Ohnishi, “New development of servo technology in mechatronics,” Trans. of Japanese Society of Electrical Engineers (in Japanese), vol. 107-D, no. 1, pp. 83-86, 1987.
[2] T. Umeno and Y. Hori, “Robust speed control of DC servomotors using modern two degrees-of-freedom con- troller design,” IEEE Transactions on Industrial Electronics, vol. 38, no. 5, pp. 363-368, 1991.
[3] T. Umeno and Y. Hori, “Robust servosystem design with two degrees of freedom and its application to novel motion control of robot manipulators,” IEEE Transactions on Industrial Electronics, vol. 40, no. 5, pp. 473-485, 1993.
[4] K. S. Eom, I. H. Suh, and W. K. Chung, “Disturbance observer based path tracking control of robot manipulator considering torque saturation,” Mechatronics, vol. 11, no.
3, pp. 325-343, 2001.
[5] S. Katsura, K. Irie, and K. Ohishi, “Wideband force control by position-acceleration integrated disturbance ob- server,” IEEE Transactions on Industrial Electronics, vol.
55, no. 4, pp. 1699-1706, 2008.
[6] J. R. Ryoo, T. Y. Doh, and M. J. Chung, “Robust dis- turbance observer for the track-following control system
of an optical disk drive,” Control Engineering Practice, vol. 12, no. 5, pp. 577-585, 2004.
[7] H. Shim and Y. Joo, “State space analysis of dis- turbance observer and a robust stability condition,” Proc.
Conference on Decision and Control, New Orleans, USA, pp. 2193-2198, 2007.
[8] J. Back and H. Shim, “Adding robustness to nominal output feedback controllers for uncertain nonlinear sys- tems: A nonlinear version of disturbance observer,”
Automatica, vol. 44, no. 10, pp. 2528-2537, 2008.
[9] J. Back and H, Shim, “An inner-loop controller guaran- teeing robust transient performance for uncertain MIMO nonlinear systems,” IEEE Transactions on Automatic Control, vol. 54, no. 7, pp. 1601-1607, 2009.
[10] H. K. Khalil, Nonlinear Systems, 2nd Ed., Prentice-Hall, NY, 1996.
[11] H. Y. Park, Y. H. Jo, and K. B. Park, “The ultimate bound of discrete sliding mode control system with short sampling period for DC motor system,” Journal of Institute of Control, Robotics, and Systems (in Korean), vol. 16, no. 3, pp. 245-248, 2010.
[12] H. H. Choi, “An LMI Approach to Nonlinear Sliding Surface Design,” Journal of Institute of Control, Robotics, and Systems (in Korean), vol. 16, no. 12, pp.
1197-1200, 2010.
백 주 훈
1997 .
1999 . 2004
. 2007 ~2008 . 2008
~ .
,
, .
심 형 보
1993 . 1995
. 2000 . 2003 ~
.
, , .