논문 2012-49-10-3
기압고도계를 적용한 GPS 고도 데이터 성능 향상에 관한 연구
( A Study on The Ddvanced Altitude Accuracy of GPS with Barometric Altitude Sensor )
김 남 혁*, 박 지 호**
( Nam-Hyeok Kim and Chi-Ho Park )
요 약
본 논문은 GPS 위성의 기하학적 배치 한계로 인한 고도값 오차를 보정하기 위하여 기압고도계를 활용한 고도 데이터의 성 능을 향상 시키는 방안을 제시하였고, 보정된 고도데이터의 정확도를 분석하였다. 코드 기반의 상업용 GPS칩은 고도 데이터의 부정확으로 신뢰도가 떨어져 이를 항법 데이터로 활용하지 못하고 있다. 이러한 문제점을 해결하기 위하여 고도 변화를 기반 으로 고도를 측정하는 기압고도계로부터 고도의 상대적 변화를 추출하고, GPS 고도계에 반영하여 보정된 고도 데이터를 획득 한다. 이를 수치지도의 고도와 비교하여 보정된 고도데이터의 정확도를 검증한다.
Abstract
This paper suggests an altitude determination algorithm using GPS and barometric altitude sensors and evaluates the algorithm by digital map contour. A code based GPS altitude has lots of errors so that the car navigation companies can not use this data. Therefore, altitude is calculated by convergence data with GPS and barometric altitude variance in this paper. The modified altitudes are compared with the digital map contour and then this algorithm's effect is evaluated for the car navigation systems.
Keywords: Altitude determination(고도 결정), GPS(위성측위시스템), Barometric altitude sensor(기압고도계)
Ⅰ. 서 론
GPS(Global positioning system) 분야는 20여년 전 부터 미 국방성에서 군사적인 목적으로 사용하기 위해 서 개발하였다. 그 이후 시스템의 정확도는 상당히 발 전하였으나, 민간부문에서 일반인들이 정확도를 유지 할 수 없도록 1990년 3월부터 사용자 제약 (SA : selective availability)이란 이름으로 위치 정확도를 낮
* 정회원, 대구경북과학기술원 IT융합연구부
(Division of IT Convergence, Daegu Gyeongbuk Institute of Science & Technology)
※ 본 연구는 교육과학기술부에서 지원하는 대구경북
과학기술원 기관고유사업에 의해 수행되었습니
다.(12-IT-02)
접수일자: 2012년6월7일, 수정완료일: 2012년10월8일
추는 방법을 취하였다. 이러한 정책은 2000년 5월 1일 부로 중지 되면서, 일반 이용자들이 얻을 수 있는 자료 의 정확도도 크게 향상 되었다. 정확도의 향상으로 차 량용 내비게이션이 보급이 활성화 되었고, 사용자에게 정확한 위치인식이 가능하도록 3D 형태의 전자지도를 통한 안내까지 서비스되고 있다. 그러나 수직적 위치인 고도데이터의 경우, 수평적 위치 좌표에 비해 오차가 크다는 이유로 이를 서비스 하지 않고 있다. 이러한 제 약으로 운전자가 고가도로나 지하차도와 같은 입체도로 에서 오진입 하는 경우, 즉각적인 경로 수정 안내를 받 지 못해 교통사고의 원인이 되고 있다. 현재 고도데이 터의 보정이나 GPS 음영지역을 해결하기 위해 INS(Inertial Navigation System)와의 융합을 위한 연구 가 활발히 진행 되고 있다.[1] 그러나 INS 장비 가격 및
오차의 누적이라는 단점으로 인하여 실용화 단계까지는 많은 어려움이 있을 것으로 전망된다. 따라서 본 논문 에서는 상업용 GPS 고도값의 오차를 감소시키기 위해 일반적인 레저용 기압고도계와의 융합방안을 제시하고, 실험을 통해 보정된 고도데이터의 정확도를 수치지도와 의 비교를 통해 검증하기로 한다.
Ⅱ.
GPS 고도데이터 오차의 원인현재 일반 차량용 내비게이션 장치에 활용되는 GPS 칩의 경우 코드기반의 측위 장치로 고층 빌딩 지역에서 의 수신율을 향상시키기 위해 부정확한 GPS 신호까지 수신토록 설계되어 있다. 일반적으로 코드 기반 위치결 정의 수평 정확도는 10m 정도로 알려져 있고, 수직 정 확도는 20m 이상이다. 이처럼 GPS 위성의 수평 정확도 와 수직 정확도가 차이가 나는 이유는 위성의 기하학적 배치와 밀접한 관련이 있다. 수평적 위치결정에서는 위 성의 배치가 동서남북 방향으로 고르게 분포하게 되는 경우 위치 정확도가 향상된다. 이러한 상태를 수치적으 로 표현하는 것을 DOP(Dilution of Precision)이라 하 고, 그 수치가 작을수록 위치 좌표의 정확성은 높아진 다. 일반적으로 DOP는 정규방정식의 역행렬을 이용하 여 계산이 가능하다. 여인자 행렬 Qx 는 다음과 같이 구해진다.
(1)
여인자 행렬 Qx는 4*4 행렬로 표현되는데, 여기서 3 개의 요소는 관측점의 위치 X, Y, Z에 의해 나타나며, 나머지 1개는 수신기의 시각에 의하여 나타난다. 여인 자 행렬의 요소는 다음과 같이 표현된다.
(2)
상기 행렬의 대각요소는 다음과 같이 DOP를 정의하 는데 이용 된다
(3)
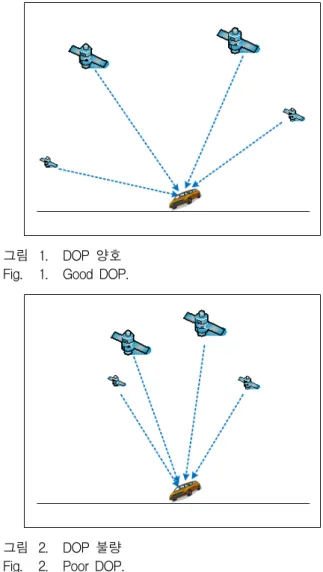
그림 1. DOP 양호 Fig. 1. Good DOP.
그림 2. DOP 불량 Fig. 2. Poor DOP.
GDOP는 Geometric DOP를, PDOP는 Position DOP 를, TDOP는 Time DOP를 각각 나타낸다.[2] <그림 1.>
은 기하하적으로 배치가 양호한 위성의 배치를 보여주 고 있다.
그러나 GPS 위성이 한 방향에 치우치거나 밀집 된 경우, 위치 정확도가 떨어지게 된다. 수평적 위치 결정 과는 다르게 수직적 위치 결정은 한 방향(공중)으로부 터만 관측이 되므로 위치 정확도가 낮다.(극단적으로 지하로부터 위성신호를 받을 수 있다면 수직 정확도도 향상 될 것이지만, 이는 물리적으로 불가능하다.) <그림 2.>는 위성의 기하하적 배치가 불량한 경우를 보여주고 있다.
이러한 한계 때문에 일반적인 상업용 GPS 칩에서의 고도 데이터는 활용되지 못하고 있는 실정이다.
Ⅲ. 기압 고도계
기압형 고도계는 고도에 따라 대기의 온도와 압력이 변화하는 성질을 이용하여 고도를 계산하는 장비로서, 대기의 온도와 압력을 측정하는 센서와 이를 이용하여 고도를 계산하는 대기자료 컴퓨터로 구성되어 있다. 일 반적으로 대기자료컴퓨터에 저장된 대기자료는 표준대 기에 대한 자료로 실제 대기와는 차이를 가지고 있다.[3]
따라서 측정 초기에 실제 고도에 맞게 조정을 하거나, 오차를 추정하여 보정하는 알고리즘을 필요로 한다. 그 러나 일반적으로 급격한 기상 변화가 없는 경우, 상대 적 고도변화량은 크게 변하지 않는다. 따라서 본 논문 에서는 기압고도계의 절대적인 고도가 아닌 상대적인 고도 변화량만을 활용하기로 한다.
Ⅳ. 고도 보정 알고리즘
GPS의 경우 관측조건이 양호한 경우 측정치의 신뢰 성을 확보할 수 있으므로 GPS 신호가 양호하지 않은 경우에만 기압고도계를 통해 고도를 보정한다. 기압고 도계는 GPS 음영지역과는 무관하게 고도의 상대적 변 화를 잘 감지하므로 기압고도계의 고도변화량을 고도 데이터 결정에 반영한다. GPS 정확도는 DOP로 판단이 가능하다. DOP 종류 중 수직정확도를 나타내는 VDOP(Vertical Dilution of Precision)를 기준으로 VDOP 값이 일정기준 이상으로 오르면 기압고도계를 통해 고도를 보정한다. VDOP에 대한 측정방정식은 아 래와 같다. 위의 수식 (2)의 전 지구적인 여인자 행렬을 지역적인 여인자 행렬 Qx로 변환하면 아래와 같다.
(4)
여기서 회전행렬 R = [ n e u ]로서, n, e, u는 지역 좌표계에서 각각 북, 동, 천정방향을 나타내는 좌표축이 다. 이로부터 수직위치에 대한 DOP를 구할 수 있다.[4]
(5)
또한, VDOP와 무관하게 고도값이 변화하는 경우를 보완하기 위해 GPS 고도값의 변화를 모니터링 하고 고 도값이 갑자기 변화하는 경우 이를 기압고도계를 통해
그림 3. GPS와 기압고도계 융합 알고리즘
Fig. 3. The algorithm of GPS altitudes and barometric altitude sensor.
보정한다. 아래의 그림은 고도 보정 알고리즘에 대한 개념도 이다.
Ⅴ. 실 험
실험은 고도의 변화가 일어나는 입체도로 구간이 많 고, 건물 등에 의해서 GPS 신호 간섭이 있는 도심지역 인 대구시 신천대로 약 7km 구간에서 수행하였다. 관측 시작 시간은 2012년 5월 8일 11시 56분부터 12시 16분 까지 약 730 epoch 동안 관측하였다. 평균 주행속도는 관측의 정확도를 위하여 60km/h 이내로 유지하였다. 관 측 장비는 상업용 GPS의 경우 ‘스토리시 포켓 GPS’를, 기압고도계의 경우 ‘ADC Summit’을 사용 하였다. 데
그림 4. 실험지역 (대구 신천대로) Fig. 4. Test site (Sincheon Blvd., Daegu).
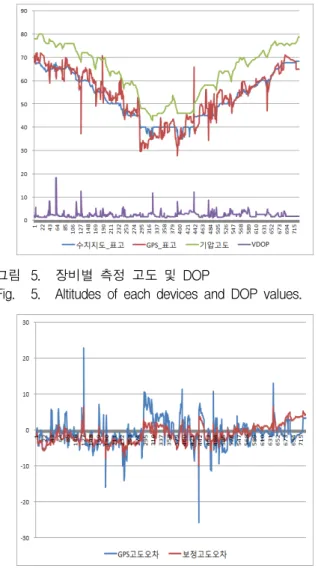
그림 5. 장비별 측정 고도 및 DOP
Fig. 5. Altitudes of each devices and DOP values.
그림 6. 수치지도 기준 고도데이터의 오차
Fig. 6. Estimated altitude errors by digital map contour.
이터의 출력은 1초에 1회 출력하였다.
실험을 통해 얻어진 GPS 고도데이터를 기준으로 VDOP값이 3이상이거나, GPS 고도변화량이 1m 이상인 경우, GPS 고도변화량과 기압 고도계의 고도변화량을 산술평균하여 보정 고도를 산출하였다.
상기의 장비를 통해 축적한 데이터를 분석한 결과는 아래와 같다. 측정고도는 해발고도를 기준으로 비교하 였다. 수치지도의 고도는 2009년 제작된 수치지도의 등 고선 데이터를 DEM(Digital Elevation Model)으로 가 공하고, 이로부터 측정지점의 고도를 추출하였다.
VDOP 값이 커지는 경우, GPS의 고도가 급격히 변하 는 것을 확인 할 수 있다.
<그림 5.>의 그래프에서 알 수 있듯이 GPS의 고도 값은 비정상적으로 급격히 변화하므로, 데이터의 신뢰 성이 떨어져 그 활용도가 낮다.
GPS의 VDOP값과 고도변화량을 분석하여, VDOP 값이 3이상이거나 고도변화가 1m이상인 경우, 직전의 고도값에 GPS 고도변화량과 기압고도계의 고도변화량 을 산술평균한 값을 더하여 보정고도를 산출하였다.
시점의 고도
고도 변화량
기압 고도계 고도 변화량
(6)
이를 수치지도의 고도와 비교하여 오차를 분석한 결 과는 <그림 6.>과 같다.
보정 전 GPS의 고도오차는 +22.98m에서 -25.62m 였 으나, 기압고도계를 통해 보정한 결과 +6.50m에서 -9.81m로 오차가 ±10m 이내로 감소하였다.
Ⅵ. 결 론
GPS의 고도는 지형이나 빌딩과 같은 주위 환경의 영 향으로 고도값의 오차가 큰 반면, 기압고도계의 경우 이러한 환경적 영향과 무관하게 고도의 변화를 산출해 낼 수 있다. 그러나 기압형 고도계는 대기압의 변화를 측정하는 방식이므로 날씨의 변화에 민감하다. 따라서 본 논문에서는 GPS의 고도값이 신뢰성을 잃는 경우, 기압형 고도계를 통해 고도를 보정하였다. 그 결과 고 도오차를 ±10m 이내로 감소시킬 수 있었다. 또한 실험 에 사용된 장비가 고가의 연구용 장비가 아닌, 일반 레 저용 GPS와 기압고도계인 만큼 상용화 가능성이 크다 고 볼 수 있다. 이러한 고도 보정 알고리즘을 통해 측정 된 고도데이터를 차량용 내비게이션 장치에 반영한다면 복잡한 입체도로의 진입구간에서 정확한 경로안내 및 오진입시 빠른 수정 안내가 가능할 것으로 전망된다.
참 고 문 헌
[1] 김남혁, 박지호, “상업용 GPS 고도 데이터 정확도 향상을 위한 기압계 활용 연구”, 한국공간정보학회 춘계학술대회, 177쪽, 부경대학교, 대한민국, 2012 년 5월
[2] B. Hofmann-Wellenhof, H. Lichteneger, J. Collins 지음, 서용철 옮김, “GPS 이론과 응용”, 시그마프 레스. pp. 329-330, 2009.
[3] 유 호, 천세범, 권철범, 이영재, 지규인, 전향식, 주
저 자 소 개 김 남 혁(정회원)
2009년 서울시립대학교 공간정보 공학과 졸업(학사)
2009년~2011년 9월 (주)팅크웨어 GIS 연구소 연구원 2011년 9월~현재 DGIST 연구원
<관심분야 : 공간정보공학, 스테레오비전, GPS, ITS>
박 지 호(정회원)
1998년 남서울대학교 정보통신 공학과 학사 졸업.
2001년 광운대학교 전자통신 공학과 석사 졸업.
2008년 광운대학교 전자통신 공학과 박사 졸업.
현재 대구경북과학기술연구원 선임연구원
<주관심분야 : 스테레오 비전, 스테레오 매칭, HW 아키텍쳐>
정민, “기압 고도계를 이용한 DGPS 고도측정 향 상”, 한국한공우주학회지, 제34권, 1호, 90-91쪽, 2006년 1월
[4] B. Hofmann-Wellenhof, H. Lichteneger, J. Collins 지음, 서용철 옮김, “GPS 이론과 응용”, 시그마프 레스. pp. 330-331, 2009.