Walking Apparatus Design through Jansen Mechanism
4
0
0
전체 글
(2)
(3)
(4)
수치
관련 문서
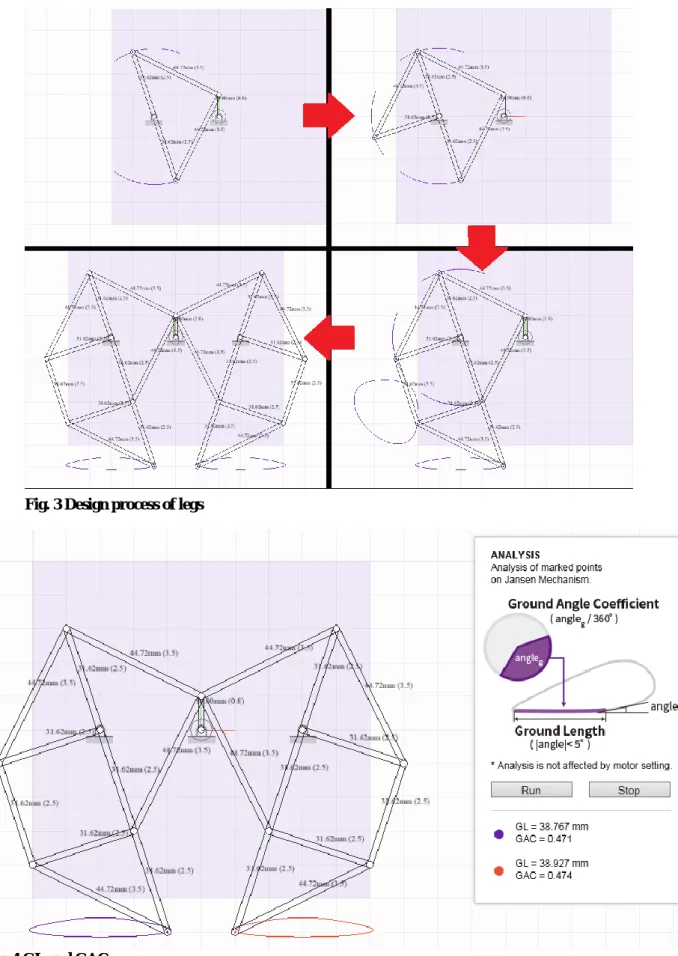
Ground score, drag score, step size, foot lift, instant speed, and average speed of foot point trajectories are used for selecting the best one.. Key Words :
Optimized design of Jansen mechanism based on target trajectory tracking method using multi-objective genetic algorithm.. Joon Heo
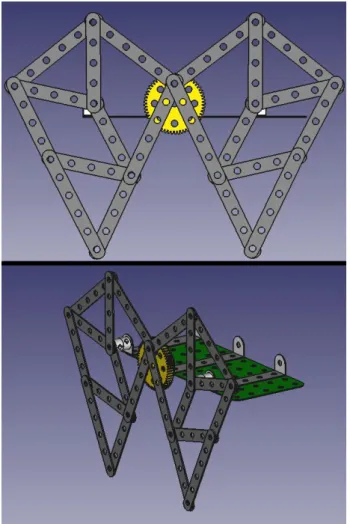
V in the study, these programs are use that is m-sketch, m-designer, Janssen mechanism optimization solver for the optimum design of m-sketch, 3D component reflecting the given
본 연구에서는 에디슨에서 제공하는 m.Sketch 시뮬레이션 소프트웨어를 이용하여 Jansen Mechanism 구조의 다리를 갖는 보행 로 봇이 최적의 안정성을 가지며 장애물을
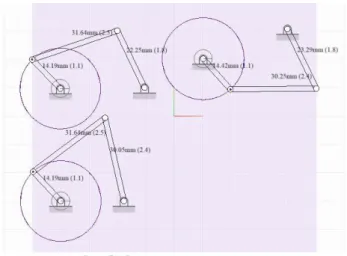
얀센(Jansen) 메커니즘은 생물체의 이동방식 을 모방하여 걸어 다닐 수 있는 로봇을 만들기 위해 꾸준히 사용되고 있는 메커니즘이다. 앞서 말했듯이 얀센 메커니즘은
Jansen's linkage bears artistic as well as mechanical merit for its simulation of organic walking motion using a simple rotary
Key Words: Ground Angle Coefficient (GAC), Ground Length (GL), Height of barrier, High speed, Ideal Jansen trajectory, Optimization, Stability,
Keyword: Jansen mechanism, optimization, kinematics, Simulation, Walking Robot 1.서론 대부분의 척추 동물들을 비롯한 지구상의 많은 동물들은 관절로 이루어진
