리프팅 작업을 위한 인간형 로봇 팔의 어깨와 팔꿈치 관절 토오크 분석
Analysis on Torques of Shoulder and Elbow Joints of Humanoid Robot Arm for Lifting Tasks
김병호
†Byoung-Ho Kim
†경성대학교 메카트로닉스공학과 생체모방, 로봇 및 웰니스 연구실
Biomimetics, Robotics and Wellness Lab., Dept. of Mechatronics Eng., Kyungsung Univer- sity
요 약
본 논문에서는 어떤 물체를 들어 올려서 전달하는 인간의 작업을 대신 수행하기 위한 인간형 로봇 팔의 어깨 및 팔꿈치 관절의 토오크 특성을 분석하고자 한다. 이러한 목적을 달성하기 위하여 인간의 일상적인 물체의 리프팅 행동을 고려하고, 단순한 구조의 어깨와 팔꿈치 관절을 갖는 인간형 로봇 팔 모델을 사용 하여 어떤 물체를 다양한 경로로 이송하는 시뮬레이션을 수행한다. 이러한 시뮬레이션을 통하여 인간형 로봇 팔을 이용한 물체의 이송 작업에 있어서 요구되는 어깨 및 팔꿈치 관절의 토오크 패턴 및 범위를 사전에 파악할 수 있음을 보인다. 결과적으로, 이러한 어깨 및 팔꿈치 관절의 토오크 분석은 효과적인 로봇 팔 메커니즘 설계에 유용하게 활용될 수 있다.
키워드: 리프팅 작업, 토오크 분석, 어깨 및 팔꿈치 관절, 인간형 로봇 팔
Abstract
This paper analyses the torque characteristics of the shoulder and elbow joints of a humanoid robot arm that is useful for an object lifting and transferring task instead of human beings. For the purpose, some typical human lifting behaviors are considered, and various simulations for lifting and transferring an object have been performed by employing a humanoid robot arm having a simple configuration of shoulder and elbow joints. Through the simulation, it is shown that the torque patterns and ranges of the shoulder and elbow joints required for such a humanoid lifting and transferring task can be found earlier in the design of a humanoid robot arm. As a result, this effort is useful for us to design an effective robot arm.
Key Words: Lifting task, Torque analysis, Shoulder and elbow joints, Robot arm for humanoids Recieved: Mar. 22, 2015
Revised : Apr. 05, 2015 Accepted: May 20, 2015
Corresponding author([email protected]. kr)
본 논문은 본 학회 2015년도 춘계학술 대회에서 선정된 우수 논문입니다.
This is an Open Access article distributed under the terms of the Creative Com- mons Attribution Non-Commercial Li- cense (http://creativecommons.org/licenses/
by-nc/3.0/) which permits unrestricted non- commercial use, distribution, and reproduc- tion in any medium, provided the original work is properly cited.
1. 서 론
어떤 물체를 반복적으로 들어 올려 다른 위치로 전달하는 작업은 산업 현장에서 뿐만 아니라 병원, 가정 등 일상생활 속에서도 다양하게 있는데, 물체가 무거운 경 우에는 사람이 직접 수행하기 힘든 경우가 많이 있다. 이러한 어려움을 해결하기 위하여 산업 현장에서는 지게차나 크레인(crain) 등의 보조적인 리프팅 메커니즘 (lifting mechanism)이 많이 활용된다. 예를 들어, 그림 1과 같이, 프레스로 철판을 가 공한 후, 다음 공정으로 이송하는 위험한 자동화 공정에서는 보다 효과적인 물체의 리프팅 및 이송(lifting and transferring)을 위하여 다양한 유형의 다관절 로봇 팔이 이용되고 있다.
그동안 인간형 로봇 분야에 있어서도 많은 연구가 진행되어 괄목할 만한 발전 이 이루어지고 있기 때문에 앞으로 다양한 분야에서 이러한 인간형 로봇의 역할이 기대되고 있다 [1, 2, 3, 4]. 또한 이동형 로봇 플랫폼(mobile robotic platform)위에 인간형 상체를 탑재하여 필드(field)에서의 다양한 작업을 용이하게 수행하기 위한 연구도 괄목할 만하다 [5]. 최근에는 인간에게 요구되는 다양한 작업을 지원하기
| 223
위한 동력형 외골격 로봇 팔 설계에 대한 관심이 높아지 고 있다 [6, 7, 8].
또한 불의의 사고로 팔의 기능에 한계가 있는 사람 을 위한 인공 팔에 관한 연구도 활발하게 이루어지고 있 다 [9]. 이러한 로봇 팔을 설계하는데 있어서 어깨나 팔 꿈치 관절을 위한 적절한 구동기(actuator)의 선정이 필 요하기 때문에 요구되는 토오크 패턴 및 범위를 사전에 파악하는 것은 매우 중요하다 [10]. 이것은 인간의 어깨 나 팔꿈치 관절을 적절한 무게추를 사용하여 리프팅하 면서 재활하는 생체역학적 운동의 관점에서도 의미가 크다 [11].
그림 1. 철판 이송에 사용되는 로봇 팔
Figure 1.A robot arm for lifting and transferring a steel plate 구체적으로, 조작하는 물체의 무게에 따른 어깨 및 팔 꿈치 관절의 토오크 영향을 분석하는 것은 로봇 팔의 산 업응용에 있어서 매우 흥미있는 일이다. 또한 로봇 팔을 구성하는 링크(link)에 의한 자중(self-load)도 로봇 팔의 안정적인 구동을 위하여 고려되어야 할 중요한 사항이 다. 만일, 로봇 팔을 이용하여 어떤 무게의 물체를 리프 팅하는데 있어서 어깨나 팔꿈치 관절의 토오크 조건에 여유가 없는 경우에는 주어진 물체를 제대로 리프팅할 수 없을 뿐만 아니라 로봇 팔이 심각하게 손상될 수도 있다. 이러한 경우에는 두 팔을 이용하거나 여러 로봇에 의한 협업(cooperated work)을 고려할 필요가 있다 [4].
본 논문에서는 어떤 물체를 수직으로 들어 올려 수 평으로 이송하기 위한 인간형 로봇 팔의 어깨와 팔꿈치 관절의 토오크 특성을 분석하여 제시하고자 한다. 여기 서는 물체의 무게에 의한 각 관절의 토오크 조건을 중점 적으로 다룬다.
2. 로봇 팔을 이용한 리프팅 작업
본 장에서는 로봇 팔을 이용하여 어떤 물체를 들어 올려 이송하기 위한 리프팅(lifting) 작업에 대하여 정의 하고, 이러한 리프팅 작업을 수행하는데 요구되는 로봇 팔의 어깨와 팔꿈치 관절의 토오크 관계식을 기술한다.
실제로, 로봇 팔을 구성하는 링크(link)에 의한 자중(self- load)도 어깨나 팔꿈치 관절의 안정적인 구동을 위하여 고려되어야 하는 요소이지만, 여기서는 물체를 다루는
데 필요한 각 관절의 토오크 성분을 중점적으로 고려하 며, 이송간에 물체는 정적인 상태에 놓여있다고 가정한 다.
그림 2. 인간형 로봇 팔에 의한 리프팅 작업 모델 Figure 2.A model of lifting tasks by a humanoid robot arm
그림 2는 인간형 로봇 시스템에 부착되어 있는 왼쪽 팔 메커니즘을 나타내며, 이것을 이용하여 어떤 물체를 적절한 경로로 리프팅하는 작업 모델을 나타낸다. 일반 적으로, 사람의 팔은 7 자유도 운동 메커니즘 [12]으로 모델링될 수 있고, 여유 자유도를 활용한 자연스러운 조 작이 가능하나, 본 논문에서는, 그림 2의 xz 평면상에서 어깨와 팔꿈치 관절만을 이용하여 어떤 물체를 수직 및 수평으로 이동하는 문제를 다룬다.
그림 2에서 물체의 중량에 의하여 손 좌표계의 x축 과 y축 방향의 힘 성분 fxH(t)와 fyH(t)는 각각 다음과 같이 나타낼 수 있다.
fxH(t) = −sin(θS+ θE(t))fW (1) fyH(t) = −cos(θS+ θE(t))fW (2) 여기서, fW는 물체의 질량(m)과 중력가속도(g)의 곱으 로 결정되고, 어깨와 팔꿈치의 관절각 θS(t)와 θE(t)는 각각 손의 중심점(oH)의 경로에 따라 결정될 수 있다.
결국, 물체를 조작하는데 요구되는 어깨 관절과 팔꿈 치 관절의 토오크 성분 τS와 τE는 다음과 같이 나타낼 수 있다.
τS(t) = l1sin(θE(t))fxH(t)
+{l1cos(θE(t)) + l2}fyH(t) (3) τE(t) = l2fyH(t) (4) 다음으로, 인간의 일상적인 물체의 리프팅 행동을 관 찰해 보면, 크게 다음과 같은 다섯 가지 유형으로 구분 해 볼 수 있다 [10, 13]. 첫째, 물체를 수직(z축 방향)으로 들어올리는 작업 유형이 있을 수 있다. 둘째는 물체를 일정한 수직 위치에서 수평(x축 방향)으로 이송하는 경 우가 있고, 세째는 물체를 일정한 수직 위치에서 좌우(y 축 방향)로 이송하는 경우가 있으며, 네째는 2 차원 공
간에서 복합된 방향으로 물체를 이송하는 경우를 들 수 있다. 마지막으로, 일반적인 3 차원 공간에서 들어 올리 면서 이송하는 작업 유형을 들 수 있다.
본 논문에서는 효과적인 분석을 위하여 2차원 xz 평 면상에서 설정된 어떤 경로로 어떤 물체를 리프팅하는 데 있어서 어깨 관절과 팔꿈치 관절의 토오크 성분이 어 떤 패턴과 범위로 나타나는지 고찰함으로써 그 특성과 활용성을 분석하고자 한다.
3. 로봇 팔 관절의 토오크 특성 분석
본 장에서는 다양한 리프팅 동작 시뮬레이션을 통하 여 로봇 팔의 어깨 및 팔꿈치 관절의 토오크 특성을 분 석한다.
시뮬레이션에 이용된 로봇 팔 메커니즘은 그림 2에 나타낸 것과 같고, 1 자유도의 어깨 관절과 1 자유도의 팔꿈치 관절을 갖고 있으며, xz 평면상에서 2차원 운동 이 가능하다. 로봇 팔의 상박(upper) 및 하박 링크(lower link)의 길이는 인간의 팔 길이를 기반으로 각각 0.30 m 및 0.33 m로 설정하였고, 물체의 질량은 60 kg으로 설 정하였다. 여기서, 물체의 모양은 이송에 영향을 주지 않는 것으로 가정하였다. 시뮬레이션은 매트랩(Matlab) 을 이용하였고, 목표는 주어진 인간형 로봇 팔을 이용 하여 설정된 물체를 z축 방향으로 일정 위치만큼 들어 올린 다음, 수평 바깥쪽(x축) 또는 수평 안쪽(-x축)으로 이송시킬때 요구되는 각 관절의 토오크를 확인함으로 써 리프팅 물체의 무게에 따른 각 관절의 토오크 패턴 및 범위를 분석하는 것이다.
표 1. 다양한 리프팅 및 이송 작업을 위한 파라미터 Table 1.Parameters for various lifting and transferring tasks
Case A(m) B(m) Remarks 1 0.30 0.20 Outward 2 0.35 0.20
3 0.30 -0.20 Inward 4 0.35 -0.20
물체의 리프팅 경로는 총 2초 동안 xz 평면에서 어깨 의 위치를 기반으로 한 손의 중심점을 기준으로 계획하 였는데, 1초 동안은 고정된 x축 위치에 대하여 z축 방향 으로 다음과 같이 물체가 이송되도록 설정하였고,
xH(t) = A (5)
zH(t) = 0.2 + 0.3sin(0.5πt) (6) 나머지 1초 동안은 고정된 z축 위치에 대하여 x축 방향 으로 다음과 같이 설정하였다.
xH(t) = A + Bsin(0.5π(t − 1.0)) (7)
zH(t) = 0.5 (8)
즉, A와 B 값에 따라 다양한 유형의 리프팅 작업을 정의 하는 것이 가능하며, 본 논문에서는 표 1과 같은 경우를 다루었다.
그림 3. 첫번째 시뮬레이션에 대한 로봇 팔의 경로 Figure 3.Trajectories of the robotic arm for the first case of the simulation
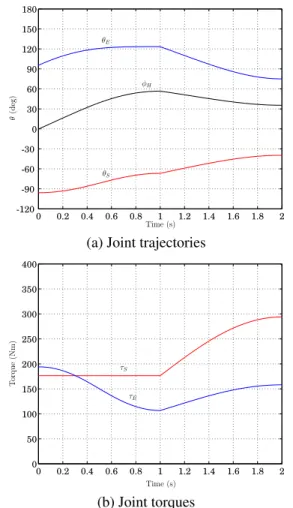
(a) Joint trajectories
(b) Joint torques
그림 4. 첫번째 시뮬레이션에 대한 어깨와 팔꿈치 관절의 궤적 및 토오크 성분
Figure 4.Trajectories and torques of the shoulder and elbow joints for the first case of the simulation
그림 3은 첫번째 시뮬레이션(Case 1)에 대한 로봇 팔 의 이동 궤적을 나타낸다. 이러한 경로를 따라 물체를
이송하게 되면, 어깨 관절(θS)와 팔꿈치 관절(θE)의 궤 적 및 토오크 성분은 그림 4와 같은 패턴으로 나타난다.
그림 5는 두번째 경우(Case 2)에 대한 로봇 팔의 이동 궤적을 나타낸다. 이 경우, 어깨와 팔꿈치 관절의 궤적 및 토오크 성분은 그림 6과 같은 패턴을 갖는다.
그림 5. 두번째 경우에 대한 로봇 팔의 경로 Figure 5.Trajectories of the robotic arm for the second case
(a) Joint trajectories
(b) Joint torques
그림 6. 두번째 경우에 대한 어깨와 팔꿈치 관절의 궤적 및 토오크 성분
Figure 6.Trajectories and torques of the shoulder and elbow joints for the second case
그림 3∼6의 결과를 살펴보면, 물체를 수직으로 들어 올리는 1초 동안의 과정에서는 어깨 관절각과 팔꿈치 관 절각은 서서히 증가하게 되고, 수평 바깥쪽(x축)으로 이
동하는 과정에서 어깨 관절각은 +방향으로 지속적으로 증가하나, 팔꿈치 관절각은 감소하게 됨을 알 수 있으며, 물체를 파지하고 있는 손의 자세(θφ) 동향도 확인할 수 있다. 또한 토오크 성분 곡선을 관찰해 보면, 물체를 수 직으로 들어 올리는 과정에서 팔꿈치 관절 토오크는 감 소하는데, 어깨 관절 토오크는 일정하다. 한편 수평으로 이동하는 과정에서는 두 관절 토오크가 모두 증가하는 경향을 보이는데, 특히 어깨 관절의 토오크가 마지막 이 송 단계에서 약 2배 정도 크게 작용되고 있음을 확인할 수 있다.
그림 7. 세번째 경우에 대한 로봇 팔의 경로 Figure 7.Trajectories of the robotic arm for the third case
그림 7과 그림 9는 각각 세번째(Case 3)와 네번째(Case 4) 시뮬레이션에 대한 로봇 팔의 이동 궤적을 나타낸다.
이러한 경로를 따라 물체를 이송하게 되는 경우에 어깨 와 팔꿈치 관절의 궤적 및 토오크 성분은 각각 그림 8과 그림 10의 패턴으로 결정됨을 확인하였다.
그림 7∼10의 결과를 살펴보면, 물체를 수직으로 들어 올리는 1초 동안의 과정에서는 어깨 관절각과 팔꿈치 관 절각은 서서히 증가하게 되고, 수평 안쪽으로 이동하는 과정에서 팔꿈치 관절각은 지속적으로 증가하나, 어깨 관절각은 감소하게 됨을 알 수 있다. 또한 토오크 성분 곡선을 수평으로 이동하는 과정에 대하여 관찰해 보면, 두 관절 토오크가 모두 감소하는 경향을 보이는데, 안 쪽으로 더 많이 이동하는 세번째 경우에는 어깨 관절의 토오크가 팔꿈치 관절의 토오크 보다 더 작아지는 경향 이 있음을 확인할 수 있다.
결과적으로, 이러한 시뮬레이션을 통하여 로봇 팔을 이용하여 물체를 어떤 경로로 들어 올려 이송할때 물체 의 무게를 감당하는데 필요로 하는 어깨 관절과 팔꿈치 관절의 토오크 패턴과 범위를 확인할 수 있음을 보였다.
구체적으로, 물체를 수평 안쪽으로 이동하는 과정에서 는 각 관절의 토오크량이 작아지고, 수평 바깥쪽으로 이 동하면, 각 관절의 토오크량이 커지는 현상을 확인할 수 있다. 따라서 이러한 시뮬레이션이 리프팅 동작 구간에 따른 각 관절의 요구 토오크량 파악에 효과적으로 이용 될 수있다고 판단할 수 있다. 특히, 수직으로 들어 올
(a) Joint trajectories
(b) Joint torques
그림 8. 세번째 경우에 대한 어깨와 팔꿈치 관절의 궤적 및 토오크 성분
Figure 8.Trajectories and torques of the shoulder and elbow joints for the third case
리는 구간에서는 어깨 관절의 토오크가 초기 자세에서 결정되는 토오크량을 일정하게 유지함을 알 수 있다. 이 러한 특성은 로봇 팔 관절의 토오크 결정이나 재활 운 동량 설정의 관점에서 유용하게 응용될 수 있을 것으로 기대한다 [14, 15]. 추가적으로, 이러한 시도는 보다 일반 적인 3차원 작업 공간으로 확장될 수 있으며, 로봇 팔의 각 링크의 질량과 함께 고려될 수 있다.
4. 결 론
본 논문에서는 어떤 물체의 리프팅 작업을 위한 인간 형 로봇 팔의 어깨와 팔꿈치 관절의 토오크 특성을 분석 하였다. 결과적으로, 수직 리프팅의 경우, 어깨 관절의 토오크는 초기 자세에서 결정되는 토오크량을 일정하 게 유지하고, 수직으로 들어 올린 다음, 수평면 안쪽으로 이동하는 과정에서는 어깨와 팔꿈치 관절의 토오크 성 분이 작아지는 경향을 보이는 반면, 바같쪽으로 이동하 는 과정에서는 점점 더 커지는 현상을 확인하였다. 이러 한 고찰은 인간형 로봇이나 재활 로봇 등의 팔 메커니즘 개발에 있어서 어깨 및 팔꿈치 관절의 토오크 패턴이나 범위의 적절한 설정을 위하여 유용하게 활용될 수 있다.
추가적으로, 일반적인 3차원 작업 공간 및 로봇 팔의
그림 9. 네번째 경우에 대한 로봇 팔의 경로 Figure 9.Trajectories of the robotic arm for the fourth case
(a) Joint trajectories
(b) Joint torques
그림 10. 네번째 경우에 대한 어깨와 팔꿈치 관절의 궤적 및 토오크 성분
Figure 10.Trajectories and torques of the shoulder and elbow joints for the fourth case
동특성을 고려한 리프팅 작업의 특성 분석에 대한 연구 가 필요하다.
References
[1] Y. Sakagami, R. Watanabe, C. Aoyama, S. Mat- sunaga, N. Higaki, and K, Fujimura, “The intelligent ASIMO: system overview and integration,” Proc. of
IEEE/RSJ Int. Conf. on Intelligent Robots and Sys- tems, pp. 2478-2483, 2002.
[2] I. Mizuuchi, T. Yoshikai, Y. Sodeyama, Y. Nakan- ishi, A. Miyadera, T. Yamamoto, T. Niemela, M.
Hayashi, J. Urata, Y. Namiki, T. Nishino, and M.
Inaba, “Development of musculoskeletal humanoid Kotaro,” Proc. of IEEE Int. Conf. on Robotics and Automation, pp. 82-87, 2006.
[3] J. S. Mehling, P. Strawser, L. Bridgwater, W. K.
Verdeyen, and R. Roverkamp, “Centaur: NASA’s mobile humanoid designed for field work,” em Proc.
of IEEE Int. Conf. on Robotics and Automation, pp.
2928-2933, 2007.
[4] C. Ott, O. Eiberger, W. Friedl, B. B¨auml, U. Hil- lenbrand, Ch. Borst, A. Albu-Sch¨affer, B. Brunner, H. Hirschm¨uller, S. Kielh¨ofer, R. Konietschke, M.
Suppa, T. Wimb¨ock, F. Zacharias, and G. Hirzinger,
“A humanoid two-arm system for dexterous manipu- lation,” Proc. of 6th IEEE-RAS International Confer- ence on Humanoid Robots, pp. 276-283, 2006.
[5] A humanoid robot, Centaur, Available: http:
//robonaut.jsc.nasa.gov/R1/field-ops/desert06.asp, 2015, [Accessed: April 24, 2015]
[6] J. C. Perry, J. Rosen, and S. Burns, “Upper-limb powered exoskeleton design,” IEEE/ASME Trans.
on Mechatronics, vol. 12, no. 4, pp. 408-417, 2007.
[7] Y. Bae, H.-Y. Choi, and Y. Moon, “The design of robot arm based on the morphological · neurological model of human,” Jour. of Fuzzy Logic and Intelli- gent Systems, vol. 17, no. 4, pp. 500-505, 2007.
[8] H. Kim and C.-Y, Lee, “Analysis on kinematics and dynamics of human arm movement toward upper limb exoskeleton robot control Part 1: system model and kinematic constraint,” Jour. of Institute of Con- trol, Robotics and Systems, vol. 18, no. 12, pp. 1106- 1114, 2012.
[9] S. K. Kundu and K. Kiguchi, “Development of a 5 DOF prosthetic arm for above elbow amputees,”
Proc. of 2008 IEEE Int. Conf. on Mechatronics and Automation, pp. 207-212, 2008.
[10] J. Watkins, Structure and function of the muscu- loskeletal system, Human Kinetics, 1999.
[11] A. Freivalds, Biomechanics of the upper limbs: me- chanics, modeling, and musculoskeletal injuries, CRC Press LLC, 2004.
[12] H. Kim, L. M. Miller, A. Al-Refai, M. Brand, and J. Rosen, “Redundancy resolution of a human arm for controlling a seven dof wearable robotic system,”
Proc. of 2011 IEEE Annual International Conference of Engineering in Medicine and Biology Society, pp.
3471-3474, 2011.
[13] V. M. Zatsiorsky, Kinemcatics of human motion, Human Kinetics, 1998.
[14] P. H. Chang and H.-S. Park, “Development of a robotic arm for handicapped people: a task-oriented design approach,” Autonomous robots, vol. 15, no. 1, pp. 81-92, 2003.
[15] M. H. Rahman, T. K. Ouimet, M. Saad, J. P. Kenn´e, and P. S. Archambault, “Development and control of a wearable robot for rehabilitation of elbow and shoulder joint movements,” Proc. of 36th Annual Conference of the IEEE Industrial Electronics Soci- ety, pp. 1506-1511, 2010.
저 자 소 개
김병호(Byoung-Ho Kim)
2001년 : 한양대 전자공학과(공학박사) 1995년 ∼ 2001년 : 한국과학기술연구 원 지능로봇연구센터 학생연구원 2002년 ∼ 2004년 : JSPS Post-Doctoral Fellow, Dept. of Robotics, Ritsumeikan Univ., Japan
2004년 ∼ 2005년 : Researcher, Biomimetic Control Re- search Center, RIKEN, Japan
2010년 ∼ 2011년 : Visiting Faculty, Robotics Institute, Carnegie-Mellon Univ., USA
2005년 ∼ 현재 : 경성대학교 메카트로닉스공학과 교수 2006년 ∼ 현재 : 한국지능시스템학회 이사
관심분야 : intelligent mobile manipulation, walking mech- anism and algorithm, multi-legged & humanoid robots, biomimetic system modeling, multi-fingered robot/artificial hands and multiple arm control, macro/micro mechanism and intelligent control, neural computation, and sports sci- ence.
Phone : +82-51-663-4692 E-mail : [email protected]
![그림 2는 인간형 로봇 시스템에 부착되어 있는 왼쪽 팔 메커니즘을 나타내며, 이것을 이용하여 어떤 물체를 적절한 경로로 리프팅하는 작업 모델을 나타낸다. 일반 적으로, 사람의 팔은 7 자유도 운동 메커니즘 [12]으로 모델링될 수 있고, 여유 자유도를 활용한 자연스러운 조 작이 가능하나, 본 논문에서는, 그림 2의 xz 평면상에서 어깨와 팔꿈치 관절만을 이용하여 어떤 물체를 수직 및 수평으로 이동하는 문제를 다룬다](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5447894.434184/2.888.139.375.368.546/시스템에-부착되어-메커니즘을-나타내며-리프팅하는-자연스러운-논문에서는-평면상에서.webp)