<응용논문> pISSN 1226-0606 eISSN 2288-6036
대형 기계 설비의 사고 대응을 위한 훈련 시뮬레이터 프레임워크
차무현
1
· 허영철1
· 문두환2†
1
한국기계연구원 기계시스템안전연구본부,2
경북대학교 정밀기계공학과Framework of a Training Simulator for the Accident Response of Large-scale Facilities
Moohyun Cha
1
, Young-Cheol Huh1
, and Duhwan Mun2†
1
Mechanical Systems Safety Research Division, Korea Institute of Machinery and Materials2
Department of Precision Mechanical Engineering, Kyungpook National University Received 9 October 2014; received in revised form 28 October 2014; accepted 29 October 2014ABSTRACT
For the proper decision making and responsibility enhancement for an unexpected accident in large-scale facilities, it is important to train operators or first responders to minimize potential human errors and consequences resulted from them. Simulation technologies, including human- computer interaction and virtual reality, enables personnel to participate in simulated hazardous situations with a safe, interactive, repetitive way to perform these training activities. For the development of accident response training simulator, it is necessary to define components com- prising the simulator and to integrate them for the given training purpose. In this paper, we ana- lyze requirements of the training simulator, derive key components, and design the training simulator. Based on the design, we developed a prototype training simulator and verified the simulator through experiments.
Key Words: Accident response, Haptic interface, Safety, Training simulator, Virtual reality
1. 서 론
대형 기계 설비의 운영 시 발생 가능한 다양한 위험요소가 존재한다. 특히 화학 공정 플랜트의 경 우 간단한 고장 또는 작업자 실수로 인해 큰 피해 손실을 가져올 수 있다. 최근에는 기계 설비의 사 고 위험을 최소화하기 위해 개발 초기 단계에서부 터 정량 및 정성적인 안전도를 고려하는 위험도 기반 설계를 수행하고 있다. 위험도 기반 설계뿐
만 아니라 대형 기계 설비의 안전 확보를 위해서 는 기계 부품에 대한 이상 증상을 사고 발생 이전 에 파악하여 능동적 조치를 취할 수 있는 예방적 유지 관리 기술과 사고 발생 시 조업자의 신속하 고 정확한 대처와 피해 확산 방지를 위한 사고 대 응 훈련 기술의 개발이 필요하다.
사고 대응 훈련 기술은 현장 조업자 또는 초기 대응자가 예상치 못한 사고에 대해 능동적이고 신 속한 대처가 가능하도록 계획적인 사전 대응 훈련 을 수행할 수 있는 시스템 기술이다. 사고 대응 훈 련을 통해 조업자는 실제 사고 상황에서의 상황 판단 및 대처 능력을 향상시킬 수 있다. 특히 일반
†Corresponding Author, [email protected]
©2014 Society of CAD/CAM Engineers
적으로 경험하기 힘든 위험 상황에서 조업자의 심 리적 부담을 완화시키고 오작을 최소화 할 수 있 어 기계 설비의 사고 발생으로 인한 위험도를 낮 출 수 있다.
웹 포탈 서비스로 플랜트 공정 안전 관련 데이 터베이스를 제공하고 있는 EU의 S2S 프로젝트
[1]
에서는 사고 대응 단계를 8단계로 구분하는 보호 모델(protection model)을 제시하고 있다. 이 모델 에 따르면 대형 기계 설비에서 사고가 발생 할 경 우 조업자의 대처 방식에 따라서 사고 피해의 규 모가 달라지게 된다. 사고 대응 훈련 기술은 사고 피해 규모에 많은 영향을 미치는 초기 대응 단계 에서 조업자의 상황 판단 및 조치 능력을 향상시 킬 수 있다.
사고 대응 훈련의 현실적인 문제는 실제 가동 중인 플랜트를 대상으로 훈련을 수행하기가 어렵 다는 점이다. 플랜트와 같은 화학 공정이 포함된 설비에서 실제 사고 상황을 재현하는 것은 매우 위험하여 경제적 및 사회적 손실을 야기할 수 있 다. 따라서 실제 가동 중인 플랜트 현장에서 사고 대응 훈련을 수행하는 것은 현실적으로 매우 어렵 다. 이러한 한계를 극복하기 위하여 시뮬레이터를 활용한 모의 훈련 및 평가 기술의 개발이 필요하 다. 특히 가상현실(VR, virtual reality) 기술을 시뮬 레이터에 적용하면 위험한 사고 상황을 가상 공간 에서 현실적으로 재현할 수 있으며 체계적인 사고 대응 훈련의 실행 및 평가가 가능하다
[2]
. 가상현실 을 이용한 사고 대응 훈련 시뮬레이터 기술은 기 존의 매뉴얼 기반 단방향 교육에서 벗어나 사고 상황에 대해서 시공간이 정합된 체감형 상호작용 을 통해서 교육을 할 수 있다. 이와 같은 장점으로 인해서 사고 대응 훈련 시뮬레이터는 사고 발생 시 현장 조업자의 대응 능력을 향상 시킬 수 있는 효과적인 수단이 될 수 있다.본 논문에서는 대형 기계 설비에 대한 조업자의 사고 대응 능력 향상을 위해서 훈련 시뮬레이터를 개발한 결과를 설명한다. 이를 위해 화학 공정이 포함하는 플랜트의 사고 상황에서 현장 조업자의 대응력 향상을 위한 훈련 시뮬레이터의 요구사항 을 분석하고 이를 기반으로 플랜트 사고 대응 훈 련 시뮬레이터의 공통 프레임워크를 제안한다. 그 리고 프레임워크를 구성하는 주요 모듈에 대한 소 프트웨어와 하드웨어를 개발한다. 개발된 주요 모 듈들을 통합하여 간단한 훈련 시나리오의 수행이
가능한 사고 대응 훈련 시뮬레이터를 개발하고 검 증 실험을 수행한다.
이 논문은 다음과 같이 구성된다. 2절에서 관련 연구의 현황을 소개한다. 3절에서는 사고 대응 훈 련 시뮬레이터의 공통 프레임워크를 제시한다.
4절에서는 시뮬레이터 프레임워크를 구성하는 주 요 기술에 대해서 논의한다. 5절에서는 사고 대응 훈련 시뮬레이터의 구현 및 실험 결과를 설명한 다. 마지막으로 6절에서 이 연구의 결론을 맺는다.
2. 기존 연구
플랜트 공정 산업에서는 동적 공정 시뮬레이 션
[3]
기술을 이용하여 제어실을 재현하여 공정 제 어 훈련을 수행하기 위한 운전자 훈련 시뮬레이터 (OTS, operator training simulator)가 적용되어 왔다
[4-6]
. 최근에는 이러한 훈련 시뮬레이터에 가상현실 기술을 적용하여 보다 향상된 교육 환경을 제공하기 위한 연구
[7]
가 보고되었다. 이러한 운전 자 훈련 시뮬레이터의 경우 사고 현장의 대처 훈 련보다는 공정의 이해도 증진과 제어실 훈련에 초 점이 맞춰져 있다.화학 공정 플랜트의 안전 운영을 위해 가상현실 기술을 적용한 연구들도 다수 보고되었다
[8-11]
. 그 러나 이 연구들도 사고 대응 훈련 보다는 실감형 가상환경의 구현을 통해 복잡한 플랜트 공정에 대 한 이해도를 높이는 것을 목적으로 하였다. 한편, Invensys사에서는 플랜트 조업자에게 몰입형 가상 훈련 환경을 제공할 수 있는 EYESIM[12]
솔루션을 개발하였다. EYESIM은 OTS와 연계하여 플랜트 공정을 이해하고 현장 작업을 가상으로 체험할 수 있는 환경을 제공하지만, 사고 대응보다는 유지보 수에 초점이 맞춰져 있으며, 체감형 가상현실 기 술보다는 그래픽을 이용한 시각적 몰입감을 제공 하는데 그치고 있다.가상현실 기술의 적용이 가장 활발한 분야는 화 재 대응 훈련 분야이다
[12-14]
. 화재 대응 훈련을 위 해서 간단한 물리모델을 이용해 화재 상황을 모사 하고 게임 기술 및 실감형 가시화 기술 등을 적용 하여 훈련에 대한 몰입도를 향상시켰다. 최근에는 CFD(computational fluid dynamics) 기반 모의 기 술을 적용하여 화재 상황을 현실과 가장 가깝게 모의하고 모의 결과를 실시간으로 가시화하는 기 술에 관한 연구도 수행되었다[2,15]
.지금까지 보고된 사고 대응 훈련 시뮬레이터 관 련 연구들은 대부분 그래픽 컨텐츠에 기반한 시각 적인 몰입감 제공에 초점이 맞춰져 있다. 시각적 몰입감이 훈련 효과를 높이는데 많은 역할을 하는 것은 사실이다. 그러나 가상세계 네비게이션 및 임 무 수행을 위한 동작 행위 등과 같은 훈련 참여자 의 시공간적 상호작용도 훈련 효과에 많은 영향을 미친다. 이와 관련하여 최근에는 다양한 체감형 휴 먼 인터페이스를 적용하여 가상현실 시뮬레이터를 개발한 연구들이 지속적으로 보고되고 있다
[16-18]
. 그리고 기존의 사고 대응 훈련 시뮬레이터 연구들 은 대부분 특정 사고 시나리오의 수행을 위한 시 뮬레이터 요소 기술의 개발을 목표로 하고 있어 다수의 훈련 시나리오를 지원하고 다양한 체감형 휴먼 인터페이스를 지원하는 사고 대응 훈련 시뮬 레이터의 소프트웨어 및 하드웨어 프레임워크 개 발에 관한 연구는 미비한 상황이다[19,20]
.3. 사고 대응 훈련 시뮬레이터 프레임워크
3.1 시뮬레이터의 요구사항
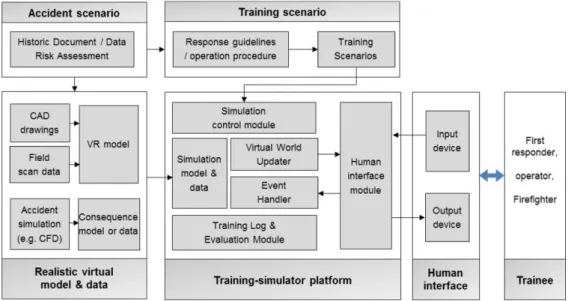
본 연구의 시뮬레이터는 플랜트 등의 대형 기계 설비에서 발생한 비상 상황 훈련 환경을 유저에게 제공하고 훈련 상호작용을 수행하는 것을 목적으 로 한다. 따라서, 본 시뮬레이터는 가상의 상황 훈 련을 수행하고자 하는 훈련자 및 전체 훈련 수행 을 관장하는 훈련 운영자를 그 대상으로 하며, 이 로부터 훈련목적을 달성을 위한 시뮬레이터의 요 구사항을 도출하였다. 사고 대응 훈련 시뮬레이터 는 일반적으로 Fig. 1과 같이 훈련 시나리오(training scenario), 현실감 있는 가상 환경(realistic virtual world), 몰입형 인터페이스(immersive interface), 평가 및 피드백(evaluation and feedback), 시뮬레 이터 엔진(simulator engine)으로 구성된다. 사고 대응 훈련 시뮬레이터는 다수의 사고 유형에 따른 훈련 시나리오의 지원이 필요하다. 그리고 훈련 시 나리오에 따라 가상 환경에서 사고 현상을 사실적 으로 모사할 수 있는 가상 환경 구축 기술과 함께 훈련자가 가상세계에 몰입하여 상호작용을 함으 로써 체감도를 극대화 할 수 있는 휴먼 인터페이 스 기술을 개발해야 한다. 또한 조업자의 훈련 수 행을 위한 시스템 제어 기술과 훈련 결과의 평가 를 위한 평가 기술 등이 필요하다.
사고 대응 훈련 시뮬레이터는 가스 누출 또는 화재와 같은 사고 발생 시 사고 유형에 따라 확산 억제, 현장 조치, 구호 등의 적절한 대응 훈련을 하 는 다수의 시나리오를 제공해야 한다. 그리고 사 고 대응 훈련 시뮬레이터를 이용한 조업자의 훈련 종료 후 훈련 결과를 정량적 분석을 통해 평가한 후에 평가 결과를 조업자에게 통보한다. 훈련 시 나리오에 다양한 사고 조건과 대응 방법을 고려하 기 위해서는 별도의 시나리오 저작 툴이 필요할 수 있다. 이를 위해서는 훈련 시나리오 명세를 위 한 데이터 모델과 이산 사건 시뮬레이션 등과 같 은 훈련 시나리오 실행 모듈의 추가 개발이 필요 하다. 훈련 시나리오가 한정된 경우에는 미리 정 의된 시나리오를 시뮬레이터 실행 제어기에 직접 반영하여 구현한다.
훈련자가 사고 대응 훈련을 효과적으로 수행하 기 위해서는 현실감이 있는 시설물과 사고 현상의 묘사가 필요하다. 이를 위해서 CAD(computer-aided design) 데이터나 해석 데이터를 기반으로 현실적 인 가상 환경을 구축해야 한다. 또한 훈련자와 가 상 환경과의 상호작용을 극대화 할 수 있도록 시 각, 청각, 촉각 등의 다감각 상호작용이 통합된 몰 입형 휴먼 인터페이스를 제공해야 한다.
시뮬레이터 엔진은 시스템의 전반적인 관리와 함께 훈련 상황 가시화, 가상 현실 데이터의 실시 간 처리, 구성 요소들의 제어, 및 구성 요소 들간 의 통신 등의 요소 기능을 제공해야 한다. 가상현 실 시뮬레이터에서는 일반적으로 그래픽스 엔진 이 조업자의 몰입도 및 시스템의 전반적인 성능에 가장 많은 영향을 미친다. 그래픽스 엔진을 직접 Fig. 1 Main components of accident response training
simulator
구현하는 것은 많은 시간과 비용이 필요하기 때문 에 상용 또는 공개용 그래픽스 엔진을 중심으로 하여 훈련에 필요한 요구 기능들을 제공하는 서브 모듈들을 통합하여 시뮬레이터 엔진을 개발하는 것이 바람직하다.
3.2 시뮬레이터의 하드웨어 설계
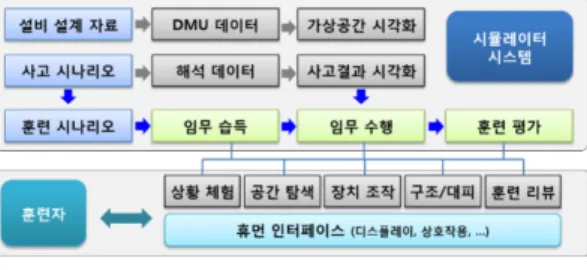
사고 대응 훈련 시뮬레이터의 요구사항에 따라 사고 대응 훈련과 평가를 지원하는 시뮬레이터의 구조를 Fig. 2와 같이 설계하였다. 사고 대응 훈련 시뮬레이터는 훈련 시뮬레이터 플랫폼(training- simulator platform), 사고 및 훈련 시나리오(accident and training scenario), 가상 환경 모델 및 데이터 (realistic virtual model & data), 체감 휴먼 인터페 이스(human interface) 등으로 구성된다. 본 시뮬 레이터의 설계는 기존 연구에서 제시하지 않았던 체감형 인터페이스 모듈과 시나리오에 따라 가상 화 컨텐츠를 제어할 수 있도록 플랫폼 기능 설계 에 중점을 두었다.
훈련 시뮬레이터 플랫폼은 가상환경 모델, 해석 데이터, 훈련 시나리오, 체감 휴먼 인터페이스와 독립적으로 시뮬레이터에서 공통적으로 필요한 요 소 기능을 제공하는 모듈들로 구성된다. 훈련 시 뮬레이터 플랫폼의 핵심 모듈인 시뮬레이션 제어 모듈은 훈련 전 과정의 시간 진행을 담당하는 서 브모듈과 훈련자의 상호작용에 의한 임무수행 이 벤트의 생성과 처리를 담당하는 이벤트 처리 서브
모듈, 그리고 훈련 평가를 위해 훈련 과정을 저장 하는 서브모듈로 구성된다. 그리고 그래픽스 가시 화 모듈은 Ogre3D
[22]
또는 Unity[23]
와 같은 상업용 또는 공개형 그래픽스 엔진을 활용하여 구현된다.훈련 및 평가 로직은 시나리오에 따른 훈련 진 행을 위해 이벤트 제어를 담당한다. 이벤트 제어 결과는 훈련 시뮬레이터 플랫폼의 신(scene) 제어 모듈과 연계되어 제어 결과가 가상 환경에 반영된 다. 그리고 훈련 및 평가 로직은 훈련 결과에 대한 평가를 수행한다. 이와 관련하여 훈련 및 평가 로 직은 임무 수행에 걸린 시간 또는 완성도 등을 입 력 받아 훈련 달성도를 평가하고 사고 결과 해석 을 통해 얻게 되는 유독성 물질의 물리량 등을 이 용하여 해당 훈련자의 위험 노출 정도를 정량적으 로 산출할 수 있다.
CAD 데이터 또는 측정 데이터를 기반으로 구 축한 가상 환경 데이터와 화재 해석 등을 통해 얻 게 되는 사고 모사 데이터는 훈련 시뮬레이터 플 랫폼이 사고 대응 훈련을 위한 가상 환경 및 사고 현상 모의를 하는데 사용된다. 이를 위해서 훈련 시뮬레이터 플랫폼은 가상 환경 모델 및 데이터를 로딩한 후 그래픽스 가시화 모듈을 이용하여 실시 간으로 가시화한다.
사용자와 시뮬레이터는 체감 휴먼 인터페이스 를 이용하여 실시간 상호작용을 수행한다. 그리고 훈련 시뮬레이터 플랫폼에는 이 인터페이스와 연 동되는 휴먼 인터페이스 모듈이 구현된다.
Fig. 2 Design of an accident response training simulator
사고 대응 시뮬레이터를 이용한 조업자 훈련은 Fig. 3과 같이 진행이 된다. 먼저 대상 그리고 사 용자는 가상 환경 안에서 체감 휴먼 인터페이스 모듈을 통해 다양한 임무를 수행된다. 이때 시나 리오를 바탕으로 한 훈련 제어 모듈을 구동하여 훈련 과정에서 발생하는 다양한 이벤트를 처리한 다. 훈련 평가 모듈에서는 임무 수행의 완성도 및 위험 노출도 등을 정량화하여 훈련 과정에 대한 평가를 수행한다.
3.3 시뮬레이터의 하드웨어 설계
사고 대응 훈련 시뮬레이터의 하드웨어는 Fig.
4와 같이 시각화 렌더링 서버 및 장치, 훈련자와의 상호작용을 담당하는 햅틱 인터페이스 서버 및 장 치, 그리고 훈련 제어를 담당하는 메인 워크스테
이션으로 구성된다. 전체 시스템을 하나의 메인 워 크스테이션으로도 구동할 수 있다. 시뮬레이터와 같이 다양한 하드웨어 입출력 장치 및 대용량 그 래픽스 렌더링이 요구되는 가상현실 시스템의 경 우 실시간 성능과 운영 안정성 확보를 위해 컴퓨 팅 자원의 분산과 네트워크 동기화를 적용하는 것 이 효과적이다.
메인 워크스테이션에서는 시뮬레이터를 구성하 는 가상 환경 데이터, 훈련 시뮬레이터 플랫폼, 훈 련 및 평가 로직, 체감 휴먼 인터페이스 시스템이 구동된다. 그리고 헤드 트래커, 글로브 등의 동작 인식 및 햅틱 인터페이스 장치가 연동된다.
햅틱 장치로는 글로브, 조이스틱 등의 일반적인 장치 외에 트레드밀 기반 보행 이동 장치를 사용 한다. Kinect를 포함하는 햅틱 장치의 제어는 독립 적인 서버에서 담당하고 다른 서버들과는 UDP(user datagram protocol) 통신을 이용하여 실시간으로 데이터를 주고 받는다.
시각화 서버는 그래픽스 엔진을 사용하여 가상 현실 환경을 렌더링한다. 그리고 햅틱 인터페이스 서버에서 전달받은 트레드밀 상의 조업자 보행 속 도를 매 프레임마다 적분하여 카메라 이동량을 계 산한 후 시각적인 보행감을 생성한다. 그리고 훈 련자의 시선을 처리하기 위해서 헤드 트래커와 시 각화 서버를 연동한다. 시각화 장치로는 타일 디 Fig. 3 Training progress of an accident response training
simulator
Fig. 4 Hardware configuration of an accident response training simulator
스플레이 시스템과 같은 다채널 디스플레이 장치 를 사용한다.
4. 훈련 몰입도 향상을 위한 실감 가상환경 및 체감 휴면 인터페이스
사고 대응 훈련 과정에서 조업자의 몰입도에 영 향을 미치는 대표적인 요소는 시뮬레이터의 시작 적인 현실감 제공 수준과 조업자와 시뮬레이터간 의 시공간적인 상호작용 수준을 들 수 있다. 이 절 에서는 조업자의 몰입도를 높이기 위해 개발 된 실감 가상환경 구축 기술과 체감 휴먼 인터페이스 구현 기술을 설명한다.
4.1 실감 가상환경
실감 가상환경 제시 기술은 대상 플랜트의 정적 인 가상환경 시각화 기술과 동적인 사고상황 시각 화 기술로 구분된다. 정적인 가상환경은 일반적인 가상현실 컨텐츠 생성과정에서 주로 사용되는 방 법으로서, CAD 모델을 활용한 가시화 형상 모델 의 구축과 그래픽스 엔진을 이용한 실시간 렌더링 기술로 구현된다. 동적인 가상환경은 미리 확보된 사고 해석 데이터를 실시간 렌더링 모듈과 연동하 는 방식
[2]
또는 전용 실시간 시뮬레이션 모듈을 구 동하는 방식[7]
으로 구현된다. 본 연구에서는 대용 량 해석 데이터 처리 및 실시간 렌더링에 있어 기 존 기술[2]
을 적용하였으며, 소규모 화염 모사 전용 의 파티클 시뮬레이션 모듈은 직접 개발하였다.4.1.1 정적 가상환경
정적 가상환경의 구축 과정은 Fig. 5와 같이 대 상 거대 시설물의 2차원 CAD 도면(설비, 건축, 토 목, 배관 등)이나 3차원 CAD 데이터를 바탕으로 3차원 폴리곤 모델(polygon model)을 생성하는 과 정과 3차원 폴리곤 모델에 실감형 텍스쳐 렌더 링, 특수 효과 등을 삽입하고 모델 최적화 등의 컴 퓨터 그래픽스 기법을 활용하여 가상현실 모델을 생성하는 과정으로 구분된다. 구축된 가상 환경 모 델로는 저장 탱크, 배관, 밸브 등의 부속품, 파우 더 소화전 등의 시설, 제어판 등이 있다.
3차원 CAD 모델을 직접 폴리곤 모델로 변환하 면 폴리곤 모델의 품질과 완성도가 떨어진다. 따 라서 변환 전 또는 변화 후 모델을 참조 데이터로 활용하여 폴리곤 모델을 별도로 저작하는 것이 효
과적일 수 있다. 또한, 가시화 품질에 가장 많은 영 향을 미칠 수 있는 텍스쳐의 경우 현장에서 직접 촬영한 사진을 이용하거나 미리 파악한 재질 특성 을 기반으로 광원 효과를 시뮬레이션하여 제작된 가상의 텍스쳐를 이용할 수 있다.
4.1.2 동적 가상환경
가상현실 시뮬레이터를 이용한 사고 대응 훈련 의 효과를 높이기 위해서는 기계설비의 사고 현 상에 대한 동적 시각화 과정이 필요하다. 특히 누 출, 화재, 폭발 등의 동적 상태변화가 일어나는 물 리현상에 대해서 신뢰성이 확보된 해석 데이터를 현실감 있게 실시간으로 렌더링하는 기술이 필요 하다.
대규모 화재의 경우 연소물질의 특성, 외부 풍 향, 주변 시설물에 의한 압력변화 등 화재 결과에 영향을 미치는 고려사항이 복잡하기 때문에 대용 량 CAE(computer-aided engineering) 해석 데이터 를 빌보드 볼륨 렌더링 기술을 적용하여 실시간으 로 가시화하였다. 비교적 규모가 작은 소규모 화 재의 경우 화재 상황을 인지하고 소화 활동을 하 는데 훈련의 초점이 맞춰진다. 따라서 대규모 화 재에서 요구되는 화재 현상의 정밀한 모사보다는 화원의 정확한 인지와 소화 활동에 대한 사실적인 렌더링이 중요하다. 이를 위해 사용자에게 소규모 화재를 실감 있게 표현할 수 있도록 Fig. 6과 같이 파티클 시스템을 이용하였다. 전체적인 소규모 화 재의 확산 형태는 CAE 해석 결과를 기반으로 파 라메터를 이용하여 조절할 수 있도록 구현하였다.
4.2 체감 휴먼 인터페이스
사고 대응 훈련 시 조업자는 위험한 상황에서의 사고를 진압하는 임무를 부여 받는다. 이러한 임 Fig. 5 Construction of VR environment from CAD data
무 수행에는 3차원 공간 이동이 포함되는 객체 탐 색, 피난, 구조 등의 활동이 포함된다. 그리고 가 스 밸브의 개폐 등과 같은 특정 기계 장치의 직접 조작 또는 원격 조작 등의 작업이 포함될 수 있 다. 또한 팀 단위 훈련의 경우 다른 훈련자와의 의 사 소통도 훈련 내용에 포함될 수 있다.
기존의 훈련 시뮬레이터에서는 다양한 상호작 용이 요구되는 훈련 임무가 그래픽 컨텐츠를 기반 으로 수행되었다. 즉 키보드나 조이스틱 등의 간 접적인 휴먼 인터페이스를 이용하여 GUI(graphic user interface) 상의 그래픽 컨텐츠를 선택하거나 조작함으로써 임무를 수행한다. 이러한 훈련 방식 은 조업자가 훈련을 통해 체득할 수 있는 시간감 및 공간감의 수준을 많이 떨어뜨릴 수 있다. 그리 고 조이스틱과 같은 간접적 인터페이스로 인해 훈 련을 통해 획득된 신체적 상호작용 지식은 실제 사고 상황에 발생되는 신체적 상호작용과 전혀 달 라 활용도가 떨어진다. 오히려 조업자의 신속한 판 단과 행동을 저해할 수도 있다. 따라서 시뮬레이 터의 훈련 효과를 극대화하고 공간감 습득과 신체 기억력이 중요한 임무 수행을 위해서는 시나리오 별로 실제와 가장 동일한 체감 휴먼 인터페이스에 대한 개발이 필요하다.
사고 대응 훈련 시 적용되는 체감 휴먼 인터페
이스는 크게 입력 인터페이스와 출력 인터페이스 로 구분된다. 입력 인터페이스로는 훈련자의 움직 임을 인식하여 처리하기 위한 모션 트래커 및 이 를 통해 동작을 인식하기 위한 장치 등이 있다. 출 력 인터페이스로는 모든 임무와 연관될 수 있는 몰입형 대형 디스플레이 또는 HMD(head mounted display), 촉감 제공을 위한 햅틱 글러브, 가상 보 행을 제공하는 보행 인터페이스 장치 등이 있다.
훈련자는 이와 같은 입출력 장치를 통해 사고 대 응 훈련 시뮬레이터와 상호작용을 하고 임무를 수 행한다.
4.2.1 기계 설비 조작
사고 대응 훈련 시나리오로 게이트 밸브의 차단 및 소화전을 이용한 화재 진압 등의 임무가 있다.
이 임무의 경우 신체 및 팔 동작에 대한 정밀한 트 래킹이 필요하다. 이를 위해서 6 자유도 위치 및 방향 트래킹이 가능한 마그네틱 센서 기반 Polhemus G4 무선 트래킹 장비를 도입하였다. 훈련자는 이 장비를 손에 착용한 후 훈련을 수행한다. 최근에 는 기존 무선 트래킹 장비보다 정밀도와 처리속도 가 약간 떨어지지만 착용성이 보다 높은 Kinect
[24]
깊이 센서를 대체 적용하였다.
밸브 차단 임무의 경우 실시간으로 측정된 양 손등의 위치를 기반으로 양손의 중심에 대한 오프 셋 벡터 값을 추출하여 양 손의 회전 각도를 계산 하였다. 계산된 양 손의 회전 각도를 가상 밸브 핸 들의 회전량과 연동하여 밸브 차단 기능을 구현하 였다. 소화전 살포 임무는 밸브 차단과 동일하게 양 손의 중심점에 대한 위치 값과 방향 값을 계산 하고 이 값들을 가상 소화전 노즐의 위치와 방향 으로 매핑하여 손 동작에 따라 살포 위치와 방향 을 조정할 수 있도록 구현하였다.
이 외에도 촉감 제공이 가능한 진동 액츄에이터 기반 햅틱 데이터 글러브를 이용하여 현장 제어판 의 버튼을 가상으로 조작하는 기능을 구현하였 다. 반력을 제공하는 햅틱 글러브의 경우 HMD 기 반의 시뮬레이터에 적용하는 것은 효과적이나 스 크린을 활용한 시뮬레이터의 경우 그 몰입도가 상 당히 저해될 수 있다.
4.2.2 보행 네비게이션
사고 대응 훈련 시뮬레이터 상에서 가장 기본적 이고 자주 발생되는 임무는 특정 지점으로 이동하 Fig. 6 Visualization of small-scale fire phenomenon
using particle system
여 대상 시설물을 탐색하는 것이다. 기존에는 키 보드나 조이스틱을 이용하여 이를 수행하여 왔 다. 그러나 기본 방식에서는 시설물의 규모 및 거 리감의 파악, 임무 수행 예상 시간 파악, 지형지물 및 장애물 파악, 에너지 소모 및 체력 훈련 등에 있어 많은 제한이 있다. 이를 해결하기 위해서 Fig.
7과 같이 간단한 보행 네비게이션 장치
[25]
를 도입 하였다. 보행 네비게이션 장치는 훈련자의 걸음 동 작에 따라 지면을 이동하여 훈련자가 항상 일정한 위치에서 도보 이동을 수행할 수 있는 장치이다.보행 네비게이션을 위해 보행자의 위치를 Kinect 깊이 센서를 통해 인식하고 이를 트레드밀 속도 제어에 활용하였다.
5. 사고 대응 훈련 시뮬레이터 개발 및 검증
5.1 훈련 시뮬레이터 개발
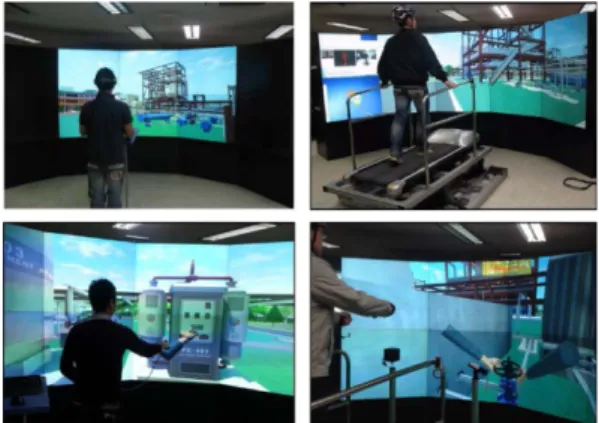
제안하는 시뮬레이터 프레임워크에 기반하여 공 정 플랜트를 대상으로 하는 사고 대응 훈련 시뮬 레이터를 Fig. 8과 같이 구현하였다.
가상 환경의 시각화를 위해 HMD를 이용한 입 체 영상과 멀티비전 디스플레이를 이용한 대형 스 크린 영상을 구현하였다. 훈련 시뮬레이터 플랫폼 의 그래픽스 엔진으로는 기능의 확장이 용이하고 관련 라이브러리가 많이 제공되는 공개형 엔진인 Ogre3D를 적용하였다. 위치 탐색을 포함하는 네 비게이션 수행을 위해 조업자가 실제로 걸어서 가 상환경을 이동하는 단방향 트레드밀 보행 시스템 을 적용하였다. 또한 촉각 피드백이 가능한 데이 터 글러브 장치를 이용하여 기계 설비에 대한 조 작 임무를 수행할 수 있도록 하였다.
5.2 훈련 시뮬레이터 검증
개발한 훈련 시뮬레이터의 검증을 위해서 소규 모 화재 발생 시나리오를 가정하여 화재 진압 실 험을 수행하였다.
대상 플랜트로서 현재 한국기계연구원이 경남 김해 지역에 건축하고 있는 극저온기기 성능평가 설비들 중에서 가장 위험한 설비 중의 하나인 LNG 저장탱크(TK-101)의 아래쪽 배관에서 가스가 누 출되어 탱크 보호 장벽 모서리 부분에 소규모 화 재가 발생하였다고 가정하였다. 이때, 가스의 누 출 유량은 0.02 kg/s, 화재의 크기는 1 MW 규모로 가정하였다.
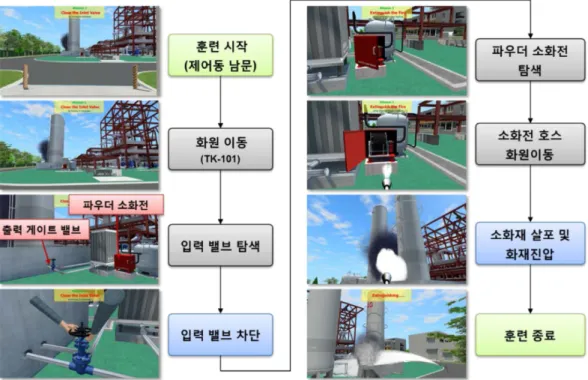
제어동에 근무하는 현장 조업자가 소규모 화재 사고 인지 후 초기 진압을 위해 취해야 할 대응 항 목 및 절차를 훈련 시나리오에 정의하였다. 먼저 조업자는 제어동 남문에서 출발하여 화원 근처 지 점까지 도보 이동이 필요하다. 그리고 사고의 2차 확산 방지를 위한 출력 게이트 밸브의 검색과 차 단작업이 필요하다. 밸브 차단 후에는 근처 소화 설비를 검색한 후 소화전을 이용하여 소화재를 살 포함으로써 화재 진압을 한다. 정의된 훈련 시나 리오를 순차적으로 도식화한 결과가 Fig. 9이다.
시뮬레이터를 이용한 훈련 결과를 분석하면 다 음과 같다. 훈련자는 실제와 동일하게 화재 발생 상황을 인식하였고 화원 위치를 지속적으로 확인 하면서 도보로 이동하였다. 이동 상황에서 훈련자 는 공간감을 가질 수 있었고 및 훈련자의 도착 예 상 시간 파악이 가능하였다. 그리고 화재 발생으 로 인한 추가 폭발의 위험이 높은 시설물에 대한 사전 조치로서 게이트 밸브 차단 작업을 직접 수 행하였다. 이를 통해 훈련자는 밸브 차단 작업을 Fig. 7 Haptic device for locomotion
Fig. 8 Implementation of a prototype training simulator
위한 밸브 위치 선정 및 밸브 회전 횟수 등을 파 악할 수 있었다. 또한 훈련자는 파우더 소화전을 이용해 노즐 각도를 조절하며 화재 진압 활동을 수행하였다. 보호 장벽에 의해 시야가 가리는 상 황에서 직접 노즐 방향과 각도를 조절하면서 파우 더 소화재의 낙하 지점을 파악함으로써 신속한 소 화를 위해 필요한 신체 감각을 체득할 수 있었다.
기존의 3차원 가상환경을 기반으로 단방향으로 이루어지던 교육 훈련과 비교하면 다양한 햅틱 및 체감형 장치를 이용하여 훈련 임무를 수행하여 기 존에는 얻기 힘들었던 시공간감 및 체감형 지식 획득이 가능하였다. 이를 통해 조업자의 훈련 효 과를 높이고 실제 사고 상황에서의 대응력을 제고 할 수 있다. 그리고 반복 훈련을 통해 사고 대응 과정에서 발생 가능한 조업자의 실수를 방지할 수 있다.
6. 결 론
대형 시설물의 사고 발생 시 조업자의 대처 능 력 향상을 위한 사고 대응 훈련 시뮬레이터 프레 임워크를 제안하였다. 이를 위해서 먼저 사고 대 응 훈련 요구사항을 분석하고 이를 바탕으로 시뮬
레이터의 소프트웨어와 하드웨어를 설계하였다.
그리고 조업자의 몰입도에 많은 영향을 미치는 실 감 가상 환경 구축 방법 및 체감 휴먼 인터페이스 의 개발 방법을 제시하였다. 마지막으로 사고 대 응 훈련 시뮬레이터를 구현하고 실험을 통해 시뮬 레이터를 이용한 사도 대응 훈련 효과를 분석하였다.
앞으로 사고 대응 훈련 시뮬레이터의 완성도 향 상을 위해서 프레임워크의 주요 구성 모듈에 대한 성능 개선과 함께 다양한 훈련 시나리오 적용을 위한 시나리오 저장 및 관리 방법에 관한 연구를 수행할 계획이다.
감사의 글
이 논문은 산업기술연구회 “대형기계설비 안전 기술 개발” 연구사업, 국토교통부 플랜트연구사업 (과제번호: 14IFIP-B085984-01), 그리고 산업통상 자원부 산업핵심기술개발사업(과제번호: 10048341) 의 지원으로 수행된 연구 결과임을 밝힙니다.
References
1. European Web Portal for Process Safety, http:
Fig. 9 Hardware configuration of an accident response training simulator
//www.safety-s2s.eu, 2011.
2. Cha, M., Han, S., Lee, J. and Choi, B., 2012, A Virtual Reality based Fire Training Simulator integrated with Fire Dynamics Data, Fire Safety Journal, 50, pp.12-24.
3. Brambilla, S. and Manca, D., 2009, Dynamic Process and Accident Simulations as Tools to Prevent Industrial Accidents, Chemical Product and Process Modeling, 4(2), pp.1-15.
4. Klugea, A., Sauerb, J., Schülera, K. and Burkoltera, D., 2009, Designing Training for Process Control Simulators: A Review of Empirical Findings and Current Practices, Theoretical Issues in Ergo- nomics Science, 10(6), pp.489-509.
5. Patle, D.S., Ahmad, Z. and Rangaiah, G.P., 2014, Operator Training Simulators in the Chemical Industry: Review, Issues, and Future Directions, Reviews in Chemical Engineering, 30(2), pp.199- 216.
6. Brambilla, S. and Manca, D., 2011, Recom- mended Features of an Industrial Accident Sim- ulator, Journal of Loss Prevention in the Process Industries, 24(4), pp.344-355.
7. Manca, D., Brambilla, S. and Colombo, S., 2013, Bridging between Virtual Reality and Accident Simulation for Training of Process-industry Oper- ators, Advances in Engineering Software, 55, pp.1-9.
8. Schofield, D. and Lester, E., 2005, Virtual Chem- ical Engineering: Guidelines for E-Learning in Engineering Education, International Journal of Media, Technology & Lifelong Learning, 1(1), http://seminar.net/index.php/volume-6-issue-1-2010.
9. Bell, J.T. and Fogler, H.S., 1995, Virtual Reality in Chemical Engineering Education, Proceedings of the American Society for Engineering Edu- cation Illinois/Indiana Sectional Conference.
10. Nasios, K., 2002, Improving Chemical Plant Safety Training Using Virtual Reality, Ph.D. the- sis, University of Nottingham.
11. Pan, Z., Cheok, A.D., Yang, H., Zhu, J. and Shi, J., 2006, Virtual Reality and Mixed Reality for Virtual Learning Environments, Computers
& Graphics, 30(1), pp.20-28.
12. Julien, T.U. St. and Shaw, C.D., 2003, Firefighter Command Training Virtual Environment, Pro- ceedings of the 2003 Conference on Diversity
in Computing.
13. Smith, S. and Ericson, E., 2009, Using Immersive Game-based Virtual Reality to Teach Fire-safety Skills to Children, Virtual Reality, 13(2), pp.87- 99.
14. Chittaro, L. and Ranon, R., 2009, Serious Games for Training Occupants of a Building in Personal Fire Safety Skills, Proceedings of Games and Virtual Worlds for Serious Applications.
15. Xu, Z., Lu, X.Z., Guan, H., Chen, C. and Ren, A.Z., 2014, A Virtual Reality Based Fire Training Simulator with Smoke Hazard Assessment Capacity, Advances in Engineering Software, 68, pp.1-8.
16. Sanders, R.L. and Lake, J.E., 2005, Training First Responders to Nuclear Facilities Using 3- D Visualization Technology, Proceedings of the 37th Conference on Winter Simulation.
17. Lecuyer, A., George, L. and Marchal, M., 2013, Toward Adaptive VR Simulators Combining Visual, Haptic, and Brain-Computer Interfaces, Computer Graphics and Applications, 33(5), pp.18-23.
18. Cha, M.H. and Huh, Y.C., 2013, An Application of Haptic and Locomotion Interfaces in a Virtual Training Environment, Proceedings of 44th Inter- national Symposium on Robotics.
19. Jain, S. and McLean, C.R., 2003, Simulation for Emergency Response: A Framework for Mod- eling and Simulation for Emergency Response, Proceedings of the 35th Conference on Winter Simulation.
20. Jain, S. and McLean, C.R., 2006, An Integrating Framework for Modeling and Simulation for Incident Management, Journal of Homeland Security and Emergency Management, 3(1), pp.1547-7355.
21. Invensys SimSci EYESIM, http://software.inven- sys.com/products/simsci
22. OGRE3D, http://www.ogre3d.org, 2010.
23. UNITY3D, http://www.unity3d.com, 2010.
24. Kinect, http://www.microsoft.com/en-us/kinect- forwindows, 2012.
25. Cha, M., Han, S. and Huh, Y., 2013, A Walking Movement System for Virtual Reality Naviga- tion, Transactions of the Society of CAD/CAM engineers, 18(4), pp.290-298.
차 무 현
2000년 포항공과대학교 기계공학과 학사
2006년 KAIST 기계공학과 석사 2006년~현재 한국기계연구원 선임 관심분야: Virtual Reality Simulator,연구원 Human Interface, Engineering- based VR System
문 두 환
1999년 고려대학교 기계공학과 학사 2001년 한국과학기술원 기계공학과
석사
2006년 한국과학기술원 기계공학과 박사
2006년~2010년 한국해양연구원 선임연구원
2010년~현재 경북대학교 정밀기계 공학과 부교수
관심분야: Computer-aided design, Industrial data standards for product data exchange, Product lifecycle management, Knowledge- based engineering, VR for Engineering Applications
허 영 철
1989년 서울대학교 공과대학 조선 공학과 학사
1991년 서울대학교 공과대학 조선 공학과 석사
2009년 서울대학교 건설환경공학과 박사
1996년~현재 한국기계연구원 책임 관심분야: Structural Damage연구원 Detection, QRA(Quantitative Risk Analysis)