Journal of Institute of Control, Robotics and Systems (2015) 21(2):173-178 http://dx.doi.org/10.5302/J.ICROS.2015.14.0059 ISSN:1976-5622 eISSN:2233-4335
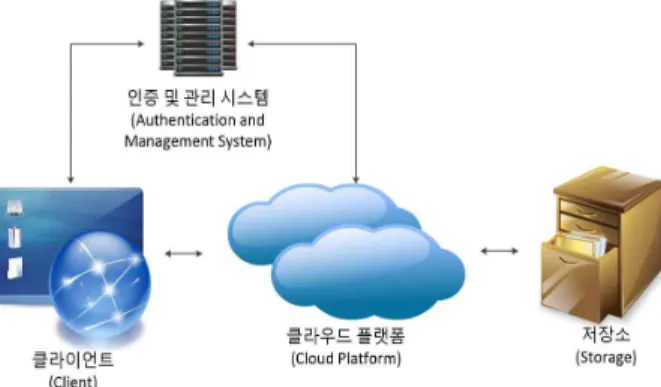
로봇 소프트웨어 개발을 위한 클라우드 기반 통합 개발 환경
A Cloud-based Integrated Development Environment for Robot Software Development
윤 재 훈, 박 홍 성
*
(Jae Hoon Yoon
1and Hong Seong Park
1,*)
1