Land Cover Classification of High-Spatial Resolution Imagery using Fixed-Wing UAV
9
0
0
전체 글
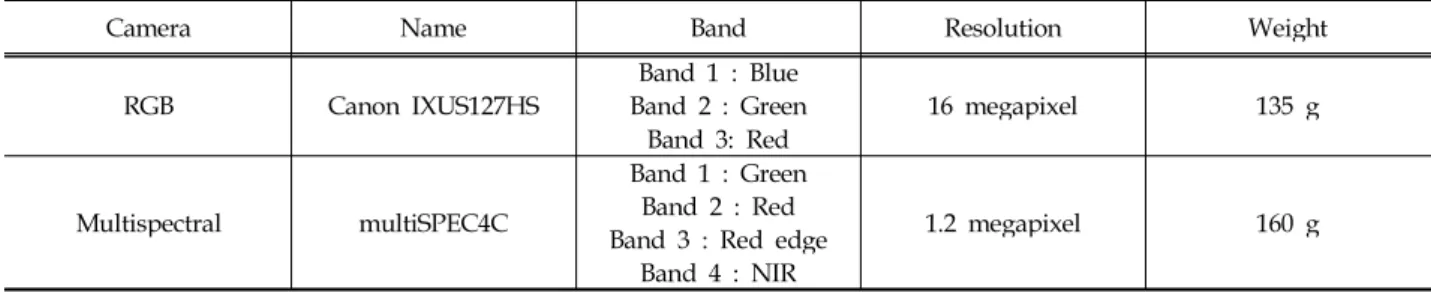
(2) Journal of Korea Society of Disaster Information. Vol.14, No.4, pp.501 - 509. 1. 서 론 본 연구에서는 UAV를 이용하여 취득한 MS(Multi Spectral)영상과 영상에서 추출한 DSM을 이용하여 토지피복분류와 정확도평가를 수행하였다. 특히, 식생지역의 분류정확도를 향상시키기 위하여 NDVI를 추가적으로 융합하였다. 감독분류 기 법은 기계학습 기법중의 하나인 random forest를 사용하여 객체기반의 분류를 수행하였으며, 분류 결과물은 오차행렬을 이용하여 정확도평가를 수행하였다. 토지피복지도(land cover map)는 지형의 형태를 동일한 기준에 따라 분류하여 연속된 특성을 지닌 구역을 지도의 형태로 나타낸 지도를 의미한다. 토지피복지도를 통해 토지이용현황의 파악이 용이하여 정책 수립 및 환경분석에 있어서 기본적인 자료로 활용된다. 토지피복지도 제작을 포함한 변화탐지 등의 지형모니터링을 위한 특정 시기 및 지역의 자료는 일반적으로 인공위성 센서 및 항공사진측량을 통하여 취득할 수 있지만, 위성영상 및 항공영상을 자료취득시기가 제한적이기 때문에, 사용자가 원하는 지역에 대한 공간정보를 빠르게 취득기가 어렵다는 문제점을 지닌다. 따라서, 전통적인 항공사진측량기법과 비교하여 상대적으로 원하는 지역에 대한 영상을 빠른시간에 취득할 수 있는 UAV는 원격탐사 분야를 포함한 공간정보와 관련된 다양한 분야에서 활용되고 있으며, UAV에 의하여 취득된 영상을 이용하여 토지피복지도와 같은 주제도를 제작하기 위한 연구 또한 진행되고 있다. 국내의 경우, UAV를 통해 취득한 영사에 대한 정사영상의 정확도를 향상시키기 위한 연구가 많이 이루어지고 있다. Yun and Lee(2014)은 소규모 지역에 적합하고 경제성이 좋은 무인항공기를 이용한 공간정보의 활용을 제안하였다. Lee(2015)은 UAV를 활용한 수변구조물의 피해를 분석하고자 하여 수변 구조물의 3차원 정보를 획득 하고 DSM을 생성하였다. 한편, 공간정보분야에 있어서 UAV를 활용하기 위한 연구들도 최근 들어 진행되고 있다. Lee, woong and Cho(2015)은 UAV를 이용하여 정확한 3차원 공간정보를 구축하기 위해 DEM과 정사영상을 제작하여 정확도 를 분석하였고, 박준규 등 (2016)은 회전익 UAV를 이용해 공간해상도 3cm급 고해상도 영상으로 DSM과 정사영상을 생성 하여 실제 VRS 측량을 통해 비교하여 적용성을 검토하였다. 국외 또한 UAV를 활용하여 다양한 분야에 적용하고자 하는 노력이 진행되고 있다. Feng, Liu and Gong.(2015)는 고해상도 UAV의 장점을 활용해 도심지 내의 식생을 Random forest 분류기법과 텍스처 정보를 결합한 하이브리드 방법을 제안하였는데 텍스처 정보를 포함하였을 때 정확도가 향상되어 텍스처 정보가 분류 정확도를 향상시키는데 영향을 끼친다는 것을 확인하였다. 이와 같이, 공간정보분야에서 UAV와 관련하여 이루 어진 대부분의 연구는 UAV를 통하여 취득된 정사영상 혹은 DSM만을 이용하여 이루어졌다. Debes, Hahn, Liao, Gautama and Du(2014)는 항공 초분광 영상과 LiDAR(Light Detection And Ranging)자료를 DSM을 추출하여 감독분류와 무감독 분류를 결합한 병렬 프로세스를 이용하고 그래프 기반의 융합 접근법을 이용한 분광 및 공간정보를 융합하는 방법을 제안하 였다. 하지만, 해당 기법들을 UAV에 적용하고, 이에 따른 영향을 분석한 연구는 상대적으로 미진한 실정이다. 본 연구에서는 UAV로 취득한 RGB 영상에서 추출가능한 측점자료(point cloud)에 의하여 생성되는 정사영상과 DSM과 NDVI, GLCM을 이용하여 지형 내의 토지피복을 효과적으로 분류할 수 있는 방법을 제안하고자 한다. 특히, 식생지역의 분류정확도를 향상시 키기 위하여 추가적으로 다중분광(multispectral) 영상을 활용하였으며, 대표적인 기계학습(machine learning) 기법인 RF 분류기법을 사용하고자 하였다. 최종적으로, 분류된 결과물은 오차행렬을 이용해 기존의 다중분광영상만을 사용하였을 경우 의 분류결과와 비교하여 정확도를 평가하였다.. 2. 촬영제원 및 대상지역 연구대상지는 아스팔트, 나지, 나무, 건물, 초지 등 도시 지역에서 볼 수 있는 다양한 토지피복 유형들로 구성되어 있는 경기도 여주시에 위치하고 있는 일부지역으로 선정하였다. 실험에 사용한 UAV는 senseFly사의 eBee를 사용하였다. eBee 는 측량목적으로 사용할 수 있는 대표적인 고정익(fixed-wing) UAV이며, GNSS(Global Navigation Satellite System) 및 관성측정장치인 IMU(Inertial Measurement Unit) 등이 탑재되어 있으며, 촬영 계획에 따라 자동비행하는 시스템이다. 해당 시스템의 세부적인 제원은 Table 1과 같다. 촬영에 사용한 카메라는 RGB 카메라(Canon IXUS127HS)와 다중분광카 메라(multispectral 4C)의 2종류의 카메라를 사용하였으며, RGB 카메라는 정사영상과 DSM 제작을 위하여, 다중분광카메 라는 촬영영상으로부터 식생지수(VI: Vegetation Index)를 추출하기 위하여 사용하였다. 카메라의 제원은 Table 2와 같다.. - 502 -.
(3) S. R. Yang et al. - Journal of Korea Society of Disaster Information Vol.14, No.4, pp.501 - 509, 2018. Table 1. Spec. UAV. Size. SenseFly eBee. Length : 80cm. of. UAV. Maximum flight. Weight. time. Radio link range. Width : 96cm Approx. 0.7 kg. 50 min. 3 km. Sensor. Character. GPS, IMU, Wind. Automatic flight. gauge, Camera. according to. ect. filming plan. height : 14cm. Table. Camera. Name. 2.. Spec. of Multispectral. Band. camera. Resolution. Weight. 16 megapixel. 135 g. 1.2 megapixel. 160 g. Band 1 : Blue RGB. Canon IXUS127HS. Band 2 : Green Band 3: Red Band 1 : Green. Multispectral. multiSPEC4C. Band 2 : Red Band 3 : Red edge Band 4 : NIR. 3. 연구 방법 본 연구에서는 UAV를 이용해 취득한 RGB 영상과 다중분광 영상을 활용하여, 정사영상, DSM, NDVI 및 GLCM 영상을 제작하였다. 생성된 각 개체(feature)들을 RF에 적용하여 토지피복지도를 생성하고자 하였다. 연구방법의 전체적인 과정은 Fig. 1과 같다.. Fig. 1. Study. - 503 -. flow.
(4) Journal of Korea Society of Disaster Information. Vol.14, No.4, pp.501 - 509. 3.1 취득 영상의 전처리를 통한 정사영상 및 DSM 생성 측량용 UAV에 탑재된 일반적인 카메라는 비측량용 카메라이며, 카메라 렌즈에 의해 영상의 중심부에서 멀어질수록 왜곡 이 발생한다. 이로 인해 발생하는 영상 내의 방사방향의 왜곡 및 접선방향의 왜곡들을 eBee 시스템에서 제공하는 내부표정요 소를 이용하여 제거하고자 하였다. 최종적으로 Fig. 2 (a)와 같이 렌즈왜곡이 포함된 영상들은 그림 2. (b)와 같이 보정할 수 있다.. a) Image before deflection. correction. Fig. 2. Example. of lens. (b) Image after deflection. distortion. correction. correction. 렌즈 왜곡이 제거된 영상들은 UAV에 탑재된 GPS와 IMU를 이용해 획득한 초기 외부표정요소를 기반으로 영상 내에서 매칭점들을 자동으로 추출하고 이를 활용하여 기하학적 위치를 구성하였으며 초기 매칭점들을 밀집화하여 모든 지점에 대한 좌표값을 획득하고 point cloud를 추출하였다. 추출된 point cloud를 격자화시켜 DSM을 생성하였으며 실험 지역은 높은 건물들이 분포되어 있는 지역이기 때문에 유리하다고 판단되는 IDW(Inverse Distance Weighting)방법을 사용하였다. 또 한, 벡터자료를 격자화시키는 과정에서 발생할 수 있는 잡음(noise) 정보를 최소화시키기 위해 잡음 필터링(noise filtering) 을 사용하였으며 높이가 동일한 지역에 대해 같은 값을 갖도록 하기 위하여 평활화(surface filtering)과정을 추가적으로 사용하여 정사영상과 DSM을 생성하였다. Fig. 3은 촬영 영역 내에서 추출한 실험 자료에 대한 정사영상 및 DSM을 나타낸 다.. a) Ortho. image. Fig. 3. Ortho. (b) DSM. image and DSM. - 504 -. for target. areas.
(5) S. R. Yang et al. - Journal of Korea Society of Disaster Information Vol.14, No.4, pp.501 - 509, 2018. 3.2 NDVI 및 GLCM 추출 다중분광 카메라에서 획득한 다중분광 영상 및 DSM은 RGB 카메라에 의하여 획득한 자료와 비교하여 낮은 공간해상도를 가지고 있기 때문에, 다중분광카메라에서 취득된 자료들은 NDVI를 추출하는 용도로만 활용하고자 하였다. NDVI는 원격탐 사분야에서 활용하는 대표적인 식생지수 중의 하나이며, 식 (1)에 의하여 계산될 수 있다. NDVI는 Fig. 4와 같다.. 여기서, NIR RED. (1). : Multispectral camera로 취득된 NIR band : RGB camera로 취득된 RED band. Fig. 4. NDVI. image. 토지피복분류에 사용할 입력자료로 NDVI와 함께 GLCM또한 추출하였다. GLCM은 영상내의 질감을 표현한 영상으로 원 격탐사 영상을 시가적으로 분석할 때, 분광정보가 아닌 공간적 특성을 활용하기 위해 사용한다. 본 연구에서 또한 분류정확도 를 높이기 위해 GLCM을 사용하였다. GLCM은 식생이 많은 지역이기 때문에 다중분광영상의 NIR 밴드를 사용하여 제작하 였다. 다음 Fig. 5는 GLCM의 예시이다.. Fig. 5. GLCM. - 505 -. image.
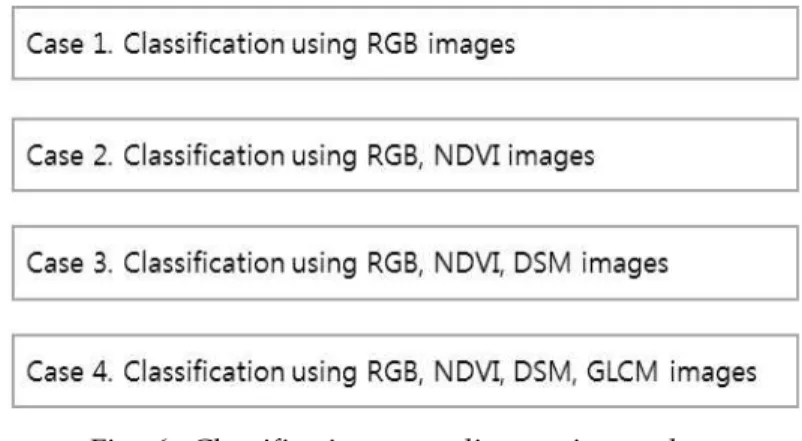
(6) Journal of Korea Society of Disaster Information. Vol.14, No.4, pp.501 - 509. 3.3 RF를 이용한 영상 분류 영상 분류에서 일반적으로 사용되는 분류 방식인 결정 트리(Dicision tree)는 노드와 엣지로 구성되어 있으며 계층 구조로 결정을 내리기 위해 계층 구조로 나누는 기술로 학습하는 데이터에 따라 결과가 크게 달라져 일반화 시키기 어렵고 계층 구조이기 때문에 중간에 에러가 생길 경우 계속 전파되는 단점이 있기 때문에 본 연구에서는 가장 많이 사용되는 분류자중 하나인 Random forest 방법을 사용하였다. RF 분류자는 여러 개의 결정 트리(Dicision tree)를 활용하는 방법으로 수많은 결정 트리를 임의적으로 학습하는 방식이기 때문에 결정 트리의 단점을 극복하고 일반화 시킬 수 있으며 최근 원격탐사 및 통계 분야에서 가장 많이 사용되고 있는 분류기법이다. 본 연구에서는 입력자료와 토지피복분류의 정확도를 확인하기 위해 다음 4가지 케이스로 분류를 수행하였다.. Fig. 6. Classification. according. to. input data. 실험 방법 중 case 1은 RGB 영상만을 이용해서 분류하였고 case 2, case 3, case 4은 case 1에서 NDVI와 DSM, GLCM 영상을 추가하는 방법으로 실험을 진행하였다. 분류 클래스의 종류는 식생과 비식생을 NDVI로 분류 가능성을 확인하기 위해 나무, 초지, 나지 등을 클래스로 지정했고 고해상도 데이터의 장점 활용 가능성을 확인하기 위해 크기가 작은 개체(벽돌, 포장재 등)을 클래스에 추가하였다(Table 3~6). 영상을 분류하기 위해 실험 지역 내에서 훈련 데이터를 획득하였으며 분류 영상을 평가하기 위해 실험지역 내 훈련 데이터를 제외한 곳 중에서 참조자료를 획득하였다.. 4. 실험결과 실험결과를 정성적으로 평가할 때, 정사영상과 다중분광영상만을 이용한 case 1의 경우보다 DSM, NDVI, GLCM을 추가 할수록 높은 정확도의 분류가 수행된 것을 확인할 수 있었다. 정사영상과 다중분광영상으로만 분류를 수행한 경우 지면점 영역인 곳에서 건물이나 자동차등으로 오분류 되는 경우들이 두드러지게 나타났으며 식생지수가 추가된 case 2 에서는 초지 와 나무에서의 오분류가 제거되었고 DSM이 추가된 case 3에서는 초지와 나무의 구분이 확실해 졌으며, GLCM이 추가된 case 4 에서는 앞의 실험에서의 오분류가 남아있었지만 줄어드는 경향을 보였다. 실험결과는 Fig. 7과 같다.. - 506 -.
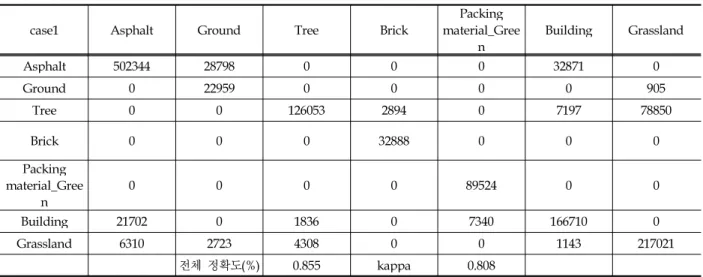
(7) S. R. Yang et al. - Journal of Korea Society of Disaster Information Vol.14, No.4, pp.501 - 509, 2018. (a) case 1. (b) case 2. (c) case 3. (d) case 4 Fig. 7. Classification. result. 분류결과를 정량적으로 평가하기 위해 오차행렬을 이용하였다. 정량적 평가 결과 또한 정성적평가와 같은 결과를 나타냈 다. 정량적 평가결과는 다음 Table 3-6과 같다.. Table. 3. Accuracy. evaluation. results. in. case 1. Packing case1. Asphalt. Ground. Tree. Brick. material_Gree. Building. Grassland. 32871. 0. n Asphalt. 502344. 28798. Ground. 0. 22959. Tree. 0. 0. Brick. 0. 0. 0. Building. 21702. Grassland. 6310. 0. 0. 0. 0. 0. 0. 0. 905. 126053. 2894. 0. 7197. 78850. 0. 32888. 0. 0. 0. 0. 0. 0. 89524. 0. 0. 0. 1836. 0. 7340. 166710. 0. 1143. 217021. Packing material_Gree n. 2723. 4308. 0. 0. 전체 정확도(%). 0.855. kappa. 0.808. - 507 -.
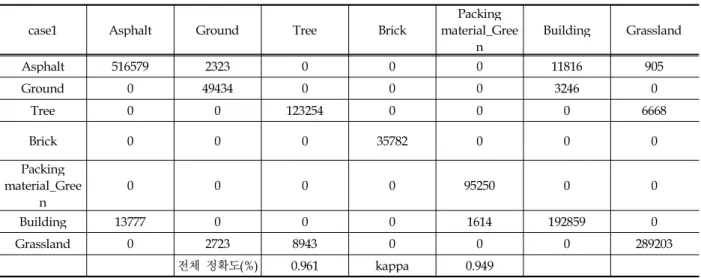
(8) Journal of Korea Society of Disaster Information. Vol.14, No.4, pp.501 - 509. Table 4. Accuracy. evaluation. results. in. case. 2. Packing case1. Asphalt. Ground. Tree. Brick. material_Gree. Building. Grassland. 0. n Asphalt. 488050. 0. 0. 0. 0. 18609. Ground. 16130. 54480. Tree. 0. 0. 0. 0. 0. 8618. 0. 119807. 2894. 0. 3491. 12570. Brick. 0. 0. 0. 29866. 0. 0. 905. 0. 0. 0. 0. 89524. 0. 0. Building. 26176. Grassland. 0. 0. 0. 3022. 7340. 177203. 0. 0. 12390. 0. 0. 0. 283301. 전체 정확도(%). 0.917. kappa. 0.892. Packing material_Gree n. Table. 5. Accuracy. evaluation. results. in. case 3. Packing case1. Asphalt. Ground. Tree. Brick. material_Gree. Building. Grassland. n Asphalt. 514598. 0. 0. 0. 0. 18319. 0. Ground. 0. 51757. 0. 0. 0. 3246. 0. Tree. 0. 0. 118157. 0. 0. 0. 10874. Brick. 0. 0. 0. 35782. 0. 1143. 0. 0. 0. 0. 0. 95250. 0. 0. Packing material_Gree n Building. 15758. 0. 0. 0. 1614. 185213. 0. Grassland. 0. 2723. 14040. 0. 0. 0. 285902. 전체 정확도(%). 0.950. kappa. 0.934. Building. Grassland. Table. 6. Accuracy. evaluation. results. in. case 4. Packing case1. Asphalt. Ground. Tree. Brick. material_Gree n. Asphalt. 516579. 2323. 0. 0. 0. 11816. 905. Ground. 0. 49434. 0. 0. 0. 3246. 0. Tree. 0. 0. 123254. 0. 0. 0. 6668. Brick. 0. 0. 0. 35782. 0. 0. 0. 0. 0. 0. 0. 95250. 0. 0. Building. 13777. 0. 0. 0. 1614. 192859. 0. Grassland. 0. 2723. 8943. 0. 0. 0. 289203. 전체 정확도(%). 0.961. kappa. 0.949. Packing material_Gree n. - 508 -.
(9) S. R. Yang et al. - Journal of Korea Society of Disaster Information Vol.14, No.4, pp.501 - 509, 2018. 5. 결론 본 연구에서는 UAV를 이용하여 취득한 정사영상과 다중분과영상을 활용하여 토지피복분류를 수행하였다. 토지피복분류 의 클래스는 아스팔트, 나지 등 7개를 선정하였으며, 분류는 감독분류 중 하나인 RF를 사용하였다. 또한, 입력자료와 분류정 확도의 관계를 확인하기 위해 4개의 케이스로 실험을 수행하였으며, 오차행렬을 이용하여 정확도 평가를 수행하였다. 실험 결과 본 연구에서 제안한 정사영상, 다중분광영상, NDVI, GLCM을 모두 추가한 경우 기존의 정사영상만을 이용하였을 때 보다 높은 정확도를 나타냈다. 추후 연구로는 추가적인 입력자료의 개발을 통해 분류 정확도를 향상시키고자 한다.. References [1] Rhee, S.A., T.J Kim, J.E. Kim, M.C Kim, H.J Chang, 2015. DSM Generation and Accuracy Analysis from UAV Images on River-side Facilities. Korean Journal of Remote Sensing 31(3):183-191. [2]. Yun,. B.. Y.,. J.O. Lee,. 2014,. A. Study. on. Application. of. the. UAV. in. Korea. for. Integrated. Operation. with. Spatial. Information, Journal of the Korean Society for Geospatial Information System 22(2):3-9. [3]. Lee,. G.S.,. Y.W. Photographing. Woong, Direction. J.K. of. Jung, Fixed. G.S. Wing.. Cho,. 2015.. Journal. of. Analysis the. of. Korean. the. Spatial. Information. Association. of. Accuracy. Geographic. According. Information. to. Studies. 17(3):141-149. [4]. Park,. J.K.,. M.G. Information.. Kim,. 2016.. Applicability. Verification. of. Rotary. Wing. UAV. for. Rapid. Construction. of. Geospatial. Asia-pacific Journal of Multimedia services convergent with Art, Humanities, and Sociology 6(4):73-80.. [5] Feng, Q., Liu. J and Gong. J 2015. UAV Remote Sensing for Urban Vegetation Mapping Using Random Forest and Texture Analysis. Remote Sensing 7(1):1074-1094. [6] Debes, C., Hahn. J, Liao. W., Gautama. S., Du. Qian. 2014. Hyperspectral and LiDAR Data Fusion: Outcome of the 2013 GRSS Data Fusion Contest. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 7(6):2405-2418.. - 509 -.
(10)
수치

+2
관련 문서
오프셋 트래킹 방법은 6차 핵실험 전·후 위성 영상레이더의 강도 영상(Intensity)에 대한 교차상관기법(Cross- Correlation)을 이용하는 것으로 상관관계 추정을 위해
NDVI 차영상에 확률밀도함수를 적용하여 토 지피복변화를 확률로 나타냄으로써 절대적 기준의 토 지피복 변화 판별을 보완하고, 토지피복변화의 확률 값
RapidEye 위성영상을 이용하였으며 영상에 고주파 필터링을 적용하여 논의 경계 정보를 강조하고 Otsu 임계화를 통해 논 경계에 대한 이진 영상을 취득하였다. 토지
A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using
M., 2012, A study on object-based image analysis methods for land cover classification in agricultural areas, Journal of the Korean Association of
