Vol.13, No.2, pp.26-33 (2019)
자이로 센서 정보 기반 CMG 고장 진단 및 식별
이정형
1,†· 이헌조
1· 이준용
1· 오화석
1· 송태성
2· 강정민
2· 송덕기
2· 서중보
31한국항공대학교 항공우주 및 기계공학과
2LIG넥스원(주)
3국방과학연구소
Detection and Identification of CMG Faults based on the Gyro Sensor Data
Jung-Hyung Lee
1,†, Hun-Jo Lee
1, Jun-Yong Lee
1, Hwa-Suk Oh
1, Tae-Seong Song
2, Jeong-min Kang
2, Deok- ki Song
2and Joong-bo Seo
31Department of Aerospace and Mechanical Engineering, Korea Aerospace University
2LIGNEX1 Co. Ltd, Pangyo
3Defense Industry Technology Center, Agency for Defense Development
Abstract
Control moment gyro (CMG) employed as satellite actuators, generates a large torque through the steering of its gimbals. Although each gimbal holds a high-speed rotating wheel, the wheel imbalances induces disturbance and degrades the satellite control quality. Therefore, the disturbances ought to be detected and identified as a precaution against actuator faults. Among the method used in detecting disturbances is the state observers. In this paper, we apply a continuous second order sliding mode observer to detect single disturbances/faults in CMGs. Verification of the algorithm is also done on the hardware satellite simulator where four CMGs are installed.
초 록
인공위성 구동기로 사용되는 제어 모멘트 자이로(CMG)는 자신의 김블을 조종하여 큰 토크를 생성한 다. 각각의 김블은 고속으로 회전하는 휠을 받치고 있기 때문에 휠의 질량 불균형은 외란을 발생시키게 되고 위성의 자세제어 성능을 저하시킨다. 따라서 구동기 고장을 대비하기 위해 외란을 진단하고 식별 할 필요가 있다. 외란을 진단하기 위해 상태 관측기를 이용한 방법을 적용하였다. 본 논문에서는 2차 슬라이딩 모드 관측기를 이용하여 CMG의 단일 외란/고장을 탐지하였다. 또한 4개의 CMG가 설치되어 있는 위성 시뮬레이터를 이용하여 이 알고리즘을 검증하였다.
Key Words : Satellite Actuator(인공위성 구동기), Control Moment Gyro(제어 모멘트 자이로), Wheel Imbalance(휠 불균형), Fault Detection(고장 탐지), Identification(식별), Hardware Simulator(하드웨어 시뮬레이 터)
1. 서 론
여러 종류의 모멘텀 교환을 이용한 구동기 중에서 제어 모멘트 자이로(CMG ; control moment gyro)는 다양한 위성의 자세 제어의 주 구동기로 사용되어왔다.
CMG의 김블(gimbal)을 조종하여 위성의 기동을 바꿀 수 있다[1]. 위성의 정밀한 자세 제어를 위해서 각각 일정한 속도로 회전하고 있는 휠을 받치고 있는 김블
의 정밀한 조종이 필요하다. 휠 베어링 마모, 축 정렬 불량, 심각한 휠 속도 흔들림 등의 CMG 고장 원인은 힘과 토크 진동을 발생시키고, 위성의 자세 안정성을 떨어뜨리게 된다.[2-4]. 위성의 상태를 모니터링 할 때, 이러한 종류의 심각한 구동기 고장은 위성 궤도 상에서 실시간으로 빠르게 감지/식별 되어야 한다. 고 장은 정상 상태의 크기와 주파수 특성과는 다른 특성 을 가지기 때문에 외부 외란 진단/식별 알고리즘을 구 동기 고장 관측기에도 적용시킬 수 있다.
위성 모델은 큰 각도의 기동에서 본질적으로 비선 Received: Oct. 11, 2018 Revised: Apr. 01, 2019 Accepted: Apr. 06, 2019
† Corresponding Author
Tel: +82-010-2414-0824, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
형이기 때문에 적절한 비선형 고장 진단 및 식별 방법 이 채택 되어야 한다[5-7]. 이러한 식별 방법은 주로 시스템의 동적 모델을 사용한다. 모델 기반 관측기 (model-based observer)는 고장 탐지 및 격리(FDI ; fault detection and isolation) 방법 중 하나다[5]. 2차 슬라이딩 모드 관측기(SMO ; sliding mode observer) 는 몇몇 연구에서 제안되어 왔다[6-9]. 본 논문에서는 외란이 유발된 CMG 고장을 진단 하는 방법으로 2차 비선형 슬라이딩 모드 관측기(second order nonlinear SMO)가 적용됐다. 고전적인 슬라이딩 모드 관측기 (SMO)의 채터링(chattering) 현상을 피하기 위해 연속 형 관측기 법칙(continuous type observer law)를 사 용하였다[9]. 진동하는 외란의 크기와 주파수가 적절 하게 추정된다. 구동기 고장 위치를 식별하기 위해 CMG의 김블 방향이 고려되어야 한다. 첫번째로, 제안 한 연속형 슬라이딩 모드 관측기를 이론적으로 정립하 였다. 둘째, 본 논문에서 고려된 CMG 고장 종류 중 하나인 휠 정적 불균형(wheel static imbalance) 발생 시 진단을 하기 위한 진단 알고리즘을 적용하였다. 단 일 구동기 고장에 대한 식별을 도식화 하였고, 4개의 CMG가 장착된 하드웨어 시뮬레이터를 이용하여 알고 리즘을 성능 검증 하였다
2. CMG를 이용한 자세제어
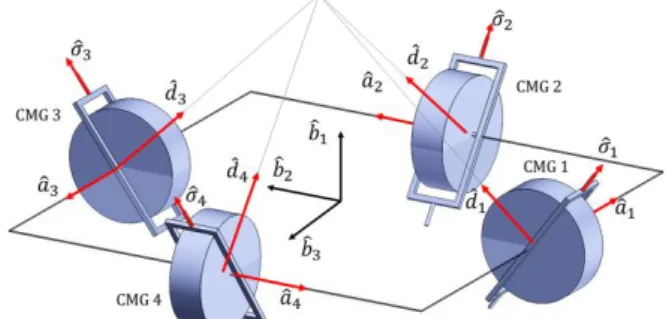
4개의 단일 김블(single gimbal) CMG가 피라미드 배치로 장착된 위성은 Fig. 1과 같이 나타낼 수 있다.
Fig. 1 CMGs installed in a pyramid configuration 위성의 운동에 대한 지배방정식은 다음과 같이 나타 낼 수 있다.
1 ( ) 2
C S I E
C
S
q E q
I I Ah u u u u
D u
h A u
(1)
여기서 q 는 쿼터니언, 는 위성의 각속도, 행렬
( )
E q 는 쿼터니언 행렬이다. 행렬 I는 위성의 관성 모 멘트 행렬이고
1 2 3 4
h h h h h T 는 휠의 모멘텀 벡 터 행렬이다. 행렬 D 는 발생 토크벡터 d 로 구성됐i 고 다음 D
d1 d2 d3 d4
와 같이 나타낸다. CMG 김블 각도 행렬은
1 2 3 4
T 이다. 벡터uC는 조종에 의한 제어 토크이다. 행렬 A는 모멘
텀 휠 벡터 ai 로 구성되어있는 행렬
1 2 3 4
A a a a a 의 김블 배치 행렬이다. u 은 몇몇 E 종류의 외부 외란으로 구성된 외부 토크 행렬이다 [9,10]. 휠 고장으로 생기는 내부 외란은 휠 속도 외 란 u , 휠 질량 불균형 외란 S u 으로 구성된다. 휠 모I 멘텀 h 은 보통 일정 하다고 가정되고 uS0 로 가정 할 수 있다.
목표 자세 qT로 도달하기 위해서 통상적인 쿼터니안 되먹임 제어법칙(quaternion feedback control law)와 특이점 강건 조향 법칙(singular robust steering law) 가 쓰였고 다음 Eq.(2)와 같다[11-13].
1
( ) ( ) ( )
( )
T T
C D P T I
T T
C
u I Ah K K E q q K E q dt
D DD u
(2)3. 외란 관측기 설계
외란 uE가 위성 몸체에 가해지게 되면 위성 자세는 즉시 영향을 받게 된다. 상태 관측기(state observer) 는 외란 관측을 위한 도구로 자이로 센서 정보를 이용 할 수 있다. 자세 방정식은 비선형이기 때문에 비선형 슬라이딩 모드 관측기(nonlinear sliding mode observer)가 다음과 같이 고려 되었다[7,9].
I I AhuCIv (3) 여기서 I 는 I의 추정 값이고 는 의 추정 값이다.
만약 상태 추정 오차를 e 와 같이 정의한다면 동역학 방정식 오차는 다음과 같다.
1
e f I u Ev (4) 여기서 f 는 관성 모멘트와 각속도에 의해 발생하는 시스템 오차이고 다음과 같이 나타낼 수 있다.
1( ) 1( )
f I I Ah I I Ah (5) 관측기의 전환 항(switching term) v 는 2차 슬라이 딩 모드(second order sliding mode)에 의해 설계 된 다[6-9]. S 는 다음을 만족 시키는 슬라이딩 면 (sliding surface)을 정의한다.
Sz So e ce (6)
여기서 z 와 c 는 o S0을 만족시킬 수 있는 게인 값
이다. 양의 값을 갖는 l 을 포함하는 Lyapunov 함수 V 를 다음과 같이 정의한다.
1 ( )
2
T T
V S SS lS (7)
0
1 0
( )
( )
( ) 0
T
T
T
E
V S S lS
S e ce z S lS
S f I u v ce z S lS
(8)
v 를 vz So ce lS dsgn( )S 와 같이 선택할 수 있 다. 이때 S0 근처로 접근하게 되면 채터링 현상이 존재하기 때문에 sgn( )S 는 sat S 로 대체되기도 한다( ) [7,8]. 본 논문에서는 sat S 대신 연속 항 dS 로 대( ) 체하여 vz So ce lS dS로 사용한다[11].
1 1
( )
T
E
T T T
E
V S f I u dS
S f S I u d S S
(9)
Equation 9로부터 양의 상수 값을 갖는 d를 적절하 게 선택하게 되면 V0를 만족할 수 있다. 최종적으 로 추정된 외란 토크 uE I f( v)는 관성모멘트 오 차만큼의 오차를 포함한다. 슬라이딩 모드 관측기 알 고리즘 흐름도는 Fig. 2와 같다.
Fig. 2 Sliding Observer for disturbance detection
4. 외부 외란 진단
4.1 긴 주기의 외란
궤도 상에서 위성은 때때로 중력 구배 토크(gravity gradient torque) 및 태양 복사압(solar radiation pressure) 등과 같은 긴 주기의 외란(secular disturbance) 토크를 받게 된다. 이러한 외란 토크는 휠 모멘텀(wheel momentum)을 포화상태까지 증가시 키다. 따라서 긴 주기의 외란 진단은 실시간으로 적절 한 대응을 할 수 있는데 도움을 준다. 설계된 관측기 는 이러한 종류의 외란의 관측기로 쓰일 수 있다. 한 예로 중형위성의 관성모멘트를 Idiag{200,80,130}
kg.m2라고 가정한다. 관측기와 제어기 게인은 다음과 같다.
KD KP KI
63 10 0
zo c l d
0.6 100 0.6 1.65
.긴 주기 외란 크기를 u
0.1 0 0
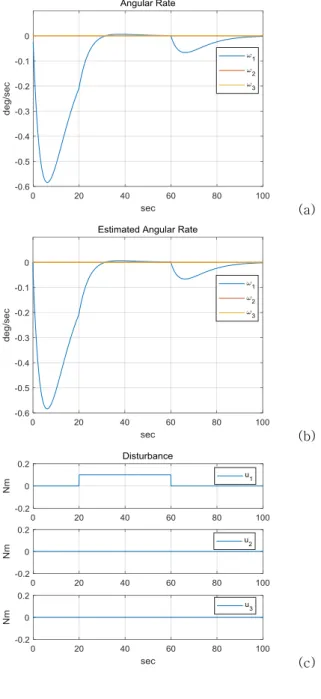
과 같이 위성의 x -axis에만 발생하고 시간 t(20,60)초에 외란이 일 정하게 발생한다고 Fig. 3(c)와 같이 가정한다.(a)
(b)
(c)
(d)
(e)
(f) Fig. 3 Responses on a secular disturbance
Figure 3(b)에서 관측기로부터 추정된 각속도는 Fig.
3(a)의 실제 각속도 와 유사함을 볼 수 있다.
Figure 3(d)에서 제안한 전환 항을 이용하여 추정한 외란이 t20초에서 잘 감지됐고 외란 크기도 잘 추 정되었다. Figure 3(f)에서 Lyapunov 함수(function)
0
V 을 확인할 수 있고, Fi.3(e) 에서 외란이 발생 하였을 때 예상대로 슬라이딩 면 상태(sliding surface state)가 S0 를 확인할 수 있다. 결과적으로 설계 한 관측기는 긴 주기 외란 감지기(secular disturbance detector)로써 역할을 잘 수행하였다.
4.2 진동 외란
위성이 지구 주위를 돌면서 공기력(aerodynamic force), 지구 편평도(earth oblateness) 등의 진동 외 란(oscillating disturbances) 영향을 받을 수 있다. 정 밀한 자세제어를 위해 진동 외란은 진단 되어야 한다.
진동 외란 진단 성능은 관측기의 주파수 특성과 밀접 한 관련이 있다. 높은 주파수의 외란을 정밀하게 진단 하기 위해서 관측기는 외란 주파수보다 5~10배의 주
파수를 가져야 한다. 진동 외란을
0 0.1sin2 D 0
u f t 와 같이 y -axis에만 발생한다 고 가정하고 t(20,60)초에 외란이 발생한다고 가정 한다. 외부 외란 주파수는 fD1 Hz 이고 관측기는 외란 주파수보다 10배 빠른 매 0.02초 마다 샘플링을 한다고 가정한다. 오차 e 시상수는 큰 c 값을 이용하 여 제거한다. Figure 4에서와 같이 진동 외란이 잘 감 지됐고 외란 크기도 잘 추정한 것을 볼 수 있다.
(a)
(b) Fig. 4 Responses on oscillating disturbance
5. 구동기 고장 진단 및 식별
위에서 설계한 관측기를 CMG의 휠 정적 불균형 (wheel static imbalance) 진단 및 식별에 적용하였다.
5.1 휠 정적 불균형에 의한 외란
CMG 휠은 높은 각운동량을 유지하기위해 고속으로 회전한다. 휠의 작은 질량 불균형이 위성 자세 성능을 저하시키는 진동 외란을 발생시킨다[2-4,9]. 휠 제작 단계에서 밸런싱(balancing) 작업은 필수이고 잘 밸런 싱 된 휠만이 위성에 탑재된다. 하지만 궤도상에 있고 임무 수행 중일 때 휠에서 자력 본딩의 이완(loose rotor magneto bonding), 베어링 마모(bearing wear) 및 정렬 불량(misalignment) 등 여러 이유에 의해 밸 런스(balance)가 급격히 나빠질 수 있다. 이러한 원인 들이 정적/동적 외란(static/dynamic disturbances)을 유발한다[9]. 몸통 좌표계(body frame) 기준 정적 불 균형은 원심 방향의 힘이 진동하도록 Eq. 8과 같이 발 생시킨다.
2
0 sin( ) cos( )
i s
F U t
t
(8)
여기서 U 는 정적 불균형 이고 S 는 휠의 각속도이 다. 행렬 위부터 순서대로 ˆa -axis, ˆu -axis, ˆg -axis 이 다. 외란 힘은 인공위성의 질량 중심에 대하여 외란 토크로 발생되며, Eq. 9와 같다.
I i i
u r F (9)
여기서 ri은 위성의 질량중심으로부터 고장 휠 까지의 위치 벡터이다.
CMG 고장 식별 방법은 다음 두가지 단계로 나눌 수 있다.
Step 1 : 직교 조건(Orthogonality Condition) . . 0 :
0 :
i I
Potential Fault O C r u
No Fault
(10) Equation 10은 uI가 ri와 직교(orthogonal) 상태인 가를 확인하는 식으로 이를 통해 4개의 CMG 중 고장 가능성이 있는 2개의 CMG를 식별할 수 있다. 정적 불균형에 의해 발생된 힘은 ri 에 의해 토크를 발생시 키기 때문에 수직 관계인 r r1 3, r r2 4, 의 성질을 이용 해 CMG1 및 CMG3 고장 가능성 또는 CMG2 및 CMG4 고장 가능성으로 분류 가능하다.
Step 2 : 격리(Isolation)
I i
i
i i
u a F a r
where a ri i0 (11)
Fi가 i번째 휠 축 ai와 직교 상태인가를 확인하는 것으로 Step 1을 통하여 식별된 고장 가능성이 있는 2 개의 CMG는 Step 2를 통해 최종적으로 고장 CMG를 격리 할 수 있다. Equation 11을 통해서 고장 가능성 있는 2개 휠의 정적 외란 힘을 유도할 수 있고 유도된 각 축 별 힘 크기를 비교하여 고장 CMG를 식별할 수
있다. 하지만 짧은 시간 동안 a ri i0 인 상태일 경우 Fi 는 분명치 않은(un-determined) 상태가 되기 때문 에 판별을 하지 못하지만 위성 운용 중에 위와 같은 상황을 만나는 경우는 극히 일부분 이기 때문에 거의 모든 상황에서 판별할 수 있다.
한 예시로 Fig. 1에서 위성 운용 중 CMG1의 wheel 이 갑작스럽게 시간 t(20,60)초 사이에 정적 외란이 증가하여 고장이 발생한다고 가정한다. 이 외란은 Fig.
5(a)와 같이 CMG1에서 외란 힘이 발생하는 것을 볼 수 있고 Fig. 5(b)와 같이 인공위성 몸체에 외란 토크 를 발생시킨다. 또한 Fig.5 (c)와 같이 외란 관측기에 의해 외란이 진단되었다. Step 1을 통한 결과는 Fig.
5(d)와 같고 CMG1과 3이 고장 가능성이 있는 것을 보여준다. Figure 5(e), (f) 에서와 같이 CMG1 에서 Fi는 휠 축 a1과 직교하기 때문에 ˆu -axis, ˆg -axis 에 서 외란 힘의 크기가 같지만 CMG3 에서 Fi와 휠 축
a3 와는 그렇지 않은 것을 볼 수 있다. 최종적으로 CMG1의 휠이 고장인 것을 식별할 수 있다.
(a)
(b)
(c)
(d)
(e)
(f) Fig. 5 Identification of Imbalance Fault Wheel
6. 하드웨어 시뮬레이터 검증
하드웨어 시뮬레이터를 이용하여 고장 관측기 성능 을 검증하였다. Figure 6은 하드웨어 시뮬레이터와 CMG이다. 하드웨어 시뮬레이터는 공기 베어링 시험 플랫폼(air-bearing test platform)이고, 한국항공대학 교 위성제어실험실에서 설계/제작을 하였다. 시뮬레이 터는 Table-top 형태로 이루어져 있고 100kg 급의 부양 성능을 가지고 있으며 중형 위성급의 축소 모델 (scale model) 이다. 시스템의 관성모멘트는
{20,15,15}
Idiag kg.m2으로 설계되었고, 중형 위성급 의 1/10 scale model로 제작되었다. 시뮬레이터의 자 세값은 실제 위성의 기준 센서(reference sensor)인 태양 센서(sun sensor)와 지구 센서(earth sensor)의 모사 장치인 태양 센서(sun sensor)와 가속도계 (accelerometer)에 의해서 측정된다. 시뮬레이터 각속 도는 자이로 센서(gyro sensor)를 이용하여 측정한다.
모든 센서들과 구동기는 우주 비행 수준(space flight class)가 아니고 지상 시험용 장치로써 성능이 낮은 것을 사용했다. CMG 또한 한국항공대학교 위성제어실 험실에서 설계/제작하였다[14]. 각 CMG의 휠 각운동
량은 2 / 3 Nms 이고 김블의 최대 각속도는 3
rad/sec 이다. 불균형 발생기(Imbalance Generator)는 Fig. 7과 같다. 더미 질량(dummy mass)를 휠 속도 (1000 rpm) 동일한 속도로 회전시켜 질량 불균형에 의한 외란을 생성한다. 불균형 발생기는 60 g.cm의 정 적 불균형을 발생시킨다. Figure 8 에서와 같이 불균형 발생기를 CMG1에 부착하였다.
Fig. 6 Hardware Simulator & SCL/KAU CMG
Fig. 7 Design & manufactured Imbalance Generator
Fig. 8 Imbalance Generator Installed on the CMG1 6.1 고장 휠의 식별
Figure 9와 같이 CMG1에 장착된 외란 발생기가 40 초 부터 정적 불균형 외란을 발생 시키게 되고 시뮬레 이터 자세가 진동하게 된다. Figure 10과 같이 외란 진단 알고리즘으로 발생된 외란 토크를 진단하였다.
그 후에 Fig. 11(a)와 같이 Step 1과 Fig. 11(b) ~ Fig.11(c)와 같이 Step 2 과정을 거쳐 CMG1의 모멘 텀 휠(momentum wheel) 고장을 최종적으로 식별하였 다. Figure 11(b) ~ Fig.11(c)에서 빨간색 점선은 60 g.cm에 해당하는 외란 힘의 진폭 크기이고 CMG1은 이와 유사하게 추정된 반면 CMG3는 그렇지 않은 것 을 볼 수 있다.
Fig. 9 Spacecraft Angular Velocity
Fig. 10 Estimated Disturbance
(a)
(b)
(c) Fig. 11 Fault Wheel Identification
7. 결 론
새롭게 변경된 연속 비선형 2차 슬라이딩 모드 관측 기(continuous nonlinear second order sliding mode observer)를 CMG 적용 위성의 외란 진단방법으로 제 안하였다. 긴 주기 외란(secular disturbance)와 진동 외란(oscillating disturbance)가 적절히 감지 되었고, 외란 크기도 성공적으로 추정되었다. 휠 정적 불균형 에 의해 발생한 내부 휠 고장은 제안된 관측기에 의해 서 진단되었고, 간단한 벡터 전치 식별 논리(vector transpose identifying logic)을 적용하여 고장 CMG를 식별할 수 있다. 알고리즘은 하드웨어 시뮬레이터를 이용하여 실제 하드웨어 적용 시에도 잘 작동함을 검 증하였다.
후 기
본 연구는 ㈜LIG넥스원의 지원을 받은 과제(2017- 15-009) ‘저궤도 고기동 인공위성용 제어모멘트 자이 로 개발분석 연구’의 일환으로 수행되었습니다.
References
[1] M. Sidi, Spacecraft Dynamics and Control, Cambridge University Press, 1997.
[2] R. Masterson et al, “Development and validation of reaction wheel disturbance models: empirical model,”
Journal of Sound and Vibration, Vol. 249, No. 3, pp. 575- 598, 2002.
[3] S. Taniwaki and Y. Ohkami, “Experimental and Numerical Analysis of Reaction Wheel Disturbance,” JSME International Journal, Vol. 46, No.2, 2003.
[4] H. Oh et al, “Torque and force measurement of a prototype KAU reaction wheel and the effect of disturbance on the attitude stability of spacecraft,” Journal of Mechanical Science and technology, Vol. 15, No. 6, pp. 743-751, 2001.
[5] V. Venkatasubramanian et al, “A review of process fault detection and diagnosis Part I; Quantitative model based methods,” Computers and Chemical Engineering, Vol. 27, pp. 293-311, 2003.
[6] W. Chen and M. Saif, “Robust fault detection in uncertain nonlinear systems via a second order slding mode observer,” Proceedings of the 40th IEEE Conference on decision and control, Orlando, Fl., U.S.A., 2001.
[7] T. Jiang and K. Khorasani, “Fault detection, isolation, and reconstruction strategy for a satellite’s attitude control subsystem with redundant wheels,” IEEE, 2007.
[8] J. Slotine and W. Li, Applied Nonlinear Control, Prentice Hall, 1991.
[9] H. Oh and J. Kim,“The Detection and Identification of Control Moment Gyro Faults,” IAA-AAS-DyCoSS2-14- 13-05, Rome, Mar., 2014
[10] H. Oh and D. Cheon, “Precision measurements of reaction wheel disturbances with frequency compensation process,”
Journal of Mechanical Science and Technology, Vol. 19, No. 1, pp. 136-143, 2005.
[11] B. Wie, H. Weiss, A. Arapostathis, “Quaternion Feedback Regulator for Spacecraft Eigenaxis Rotations,” : Journal of Guidance, Control and Dynamics, Vol. 12, No. 3, pp.
375-380, 1989
[12] H.S. Oh, S. Vadali, “Feedback Control and Steering Laws for Spacecraft using Single Gimbal Control Moment Gyros,” Journal of Astronautical Science. Vol.39, pp.183- 203, 1991.
[13] H.S. Oh, J.H. Lee, H.J. Lee, “Mass properties estimation of a satellite simulator based on the integration method,’ The 10th International Conference for Mechanical and Electrical Technology, Vancouver, 2018 [14] Jichul Kim, Jinhyuk Yoon, Junyoung Lee and Hwasuk Oh,
“Performance Analysis of Reaction Wheel according to Bearing Preload and Oil Quantity”, Journal of The Society for Aerospace System Engineering, Vol.10, No.1, pp.35- 42, 2016