232
로봇학회 논문지 제9권 제4호 (2014. 12)1. 서 론
최근 수중 로봇 분야에서 영상처리 기술이 더해진 자기 위치 추정 및 지도 작성(Simultaneous Localization and Mapping, SLAM)과 관련된 연구가 지속적으로 발전하고 있 다. 지상 로봇에서 많이 사용되고 있는 확장형 칼만 필터 (Extended Kalman Filter)와 파티클 필터(Particle Filter), Graph- based SLAM 등 다양한 알고리즘이 영상 정보를 활용하여
수중 로봇의 항법 정보 생성에 이용되고 있다[1-5]. 영상은 외부 환경을 토대로 정보를 생성하기 때문에 수중 로봇의 내부 센서에 의한 항법 정보를 보정하는 역할로 주로 사 용된다. 따라서, 항법 정보의 성능은 영상의 품질, 영상 장 비 성능 그리고 영상 처리 방법에 매우 의존적이다.
수중에서 얻을 수 있는 영상에는 일반적으로 많이 사용 되는 광학 영상과 초음파를 이용한 소나 영상이 있다. 광 학 영상은 고성능 카메라를 사용하여 고해상도의 영상과 빠른 샘플링 주기를 가질 수 있으나 탁도와 빛의 영향으 로 가시거리의 한계가 있어 그 사용이 제한적이다. 반면에, 소나 영상은 저해상도의 품질을 제공하긴 하나 소나의 성 능에 따라 100~200m이상 되는 거리를 관찰할 수 있으며, 빛과 탁도의 영향을 받지 않아 그 활용성이 광학 영상에 비해 크다고 할 수 있다.
이러한 소나 영상의 장점을 바탕으로 수중 로봇의 항법 에 이용하려는 연구가 많이 수행되고 있다. [6]는 2차원 전 방 스캐닝 소나 영상에서 항만 부두의 벽을 검출하고 이
Received : Sep. 12. 2014; Reviewed : Oct. 2. 2014; Accpeted : Oct. 23. 2014
※ This work has been done by “Development of technologies for an underwater robot based on artificial intelligence for highly sophisticated missions.” funded by Korea Research Institute of Ships & Ocean engineering (KRISO) and “Development of an autonomous swimming technology with less than 1.0m position error for underwater robot operating in man-made structural environment” funded by Ministry of Trade, Industry & Energy (MOTIE).
†
Corresponding author: Ocean System Engineering Research Division, Korea Research Institute of Ships & Ocean Engineering, Daejeon, Korea ([email protected])
1
Ocean System Engineering Research Division, Korea Research Institute of Ships & Ocean Engineering ([email protected])
2
Ocean System Engineering Research Division, Korea Research Institute of Ships & Ocean Engineering ([email protected])
소나 영상을 이용한 확률적 물체 인식 구조 기반 수중로봇의 위치추정
Underwater Robot Localization by Probability-based Object Recognition Framework Using Sonar Image
이 영 준1, 최 진 우2, 최 현 택†
Yeongjun Lee1, Jinwoo Choi2, Hyun-Teak Choi†
Abstract This paper proposes an underwater localization algorithm using probabilistic object recognition. It is organized as follows; 1) recognizing artificial objects using imaging sonar, and 2) localizing the recognized objects and the vehicle using EKF(Extended Kalman Filter) based SLAM. For this purpose, we develop artificial landmarks to be recognized even under the unstable sonar images induced by noise. Moreover, a probabilistic recognition framework is proposed. In this way, the distance and bearing of the recognized artificial landmarks are acquired to perform the localization of the underwater vehicle. Using the recognized objects, EKF-based SLAM is carried out and results in a path of the underwater vehicle and the location of landmarks. The proposed localization algorithm is verified by experiments in a basin.
Keywords: Underwater recognition framework, Artificial landmark, Probability, EKF-SLAM, Imaging sonar
http://dx.doi.org/10.7746/jkros.2014.9.4.232
Copyright KROSⓒ
를 EKF SLAM 고, 해저면 소
나[7-8], 선박의
(Normal Distrib 후 이를 항법 에서 사용한 identification so 차원 물체의 이를 통해 얻 한 연구[10]와 소 행한 연구도 있 영상 소나에 초음파를 사용 해 그 한계를 서 사용한 영 상을 보면 해 한 형상을 표 feature를 생성 아 연속 영상에 원 물체 정보 원 물체에 대한 보를 생성하게 이 있다. 결과 때 자연물(미리 는 아직 어려운 이에 본 논문 보완하고자, 소 구조를 제안하 봇의 위치추정
Fig. 1
M에 적용하여 소나 영상으로부 의 바닥을 연속 ibution Transform
정보에 활용한 한 미국 Sound
onar (DIDSON)을 2차원 소나 영 얻은 물체 인식
소나와 항법 정 있다[11]. 에 관한 다양한 용하는 소나가 를 극복하지 못하
상 소나(DIDSO 해상도가 매우 낮
표현하기 어렵다 성하는 것이 어렵
에서의 feature m 가 소나 영상에 한 인식이 쉽지 게 되어 항법 정 과적으로 소나 영 리 알고 있지 않 운 실정이다.
논문에서는 앞에서 소나 영상을 이 하고 이로부터 정에 적용하고자
. Example of son
수중 로봇의 항 부터 자연물 feat 속적으로 얻은
m) 특징을 이용 한 연구[9]도 있다 metrics 社의 을 이용한 연구 상 좌표계 모델 정보를 바탕으로 정보를 이용하여
한 연구가 수행됨 갖는 근본적인 하고 있다. 그림 ON)의 해저 영상 낮고 잡음이 많아
다. 이런 이유 렵고 물체 형태 matching이 쉽지 에 제대로 반영되 지 않다. 이는 부 정보에 오차를 가 영상의 현실적인
않은 대상)을 대
서 언급된 영상 이용한 확률적 수
얻는 정보를 바 자 한다. 연속적
nar image (from D
항법에 활용하였 ture를 검출하거 영상에서 NDT 용하여 영상 등록 다. 또한, 본 논문 Dual-frequency 구 사례를 보면 3 델링을 수행하고 로 항법에 사용 여 3D 복원을 수
됨에도 불구하고 문제점으로 인 1은 본 연구에 상의 예이다. 영 아 물체의 자세 유로 자연물에서 의 반복성이 낮 않다. 또한, 3차 되지 못하여 3차 부족한 feature 정 가중시킬 가능성 인 품질을 고려할 상으로 한 연구
상 소나의 단점을 수중 물체 인식 바탕으로 수중로 적으로 입력되는
DIDSON) 였 거 T 록 문
y 3 고 용 수
고 인 에 영 세 서 낮 차 차 정 성 할 구
을 식 로 는
소나 영상 법을 적용 인공 표식 이 수행된 추적 과정 보장될 수 원 인공 수행하고 진 2차원 거리와 방 활용할 수 을 외부 확도를 향 공 표식물 적용하여 나의 활용
수중 로 소나를 이 나 영상을 을 나타낸 심 후보의 물체 추적 리 될 수 고리즘의
Fig. 2. Bl
상으로부터 대상 용하여 참 후보 식물 정보와 비교 된다. 인식된 물체 정을 적용함으로 수 있도록 구성된 표식물로 선정 고자 한다. 위의 원 인공 표식물의
방향각이다. 이 수 있다. 수중 로
센서 정보인 영 향상 시킬 수 있 물의 인식 성능의
추측 항법 결 용성에 대한 유용
2. 수중 물체
로봇의 위치 추 이용한 영상 처리
을 이용한 수중 낸다. 총 4단계로 의 선택, 확률적 적으로 구성된다 수 있으며 독립적
개선이 용이하
ock diagram of u
상 물체에 대한 보를 선별한다. 선
교를 통해 수중 체는 재인식 과 로써 수행시간을 된다. 본 연구는 정하여 자연물 인
수중 물체 인식 의 정보는 영상
정보는 수중 로 로봇의 내부 센서 영상 소나로 보 있다. 본 논문의 의 검증과 그 결
과와 비교, 분석 용성을 검증하였
체 인식 구조
추정을 위한 수중 리를 통해 수행 중 물체 인식 구조
로 나뉘어져 있으 방법에 의한 잡 다. 각 단계는 동 적으로 동작하기 하다.
underwater object
후보군을 확률적 선택된 물체에 중 물체에 대한 과정을 실시하지 을 줄여 실시간 는 인식의 대상을 인식의 선행 연 식 구조를 통해 상 소나와의 상대
로봇의 위치 추 서에 의한 추측
정함으로써 위치 실험에서는 수중 결과를 EKF SLA
석하였으며, 영상 였다.
및 구현
중 물체 인식은 되었다. 그림 2는 구조의 전체적인
으며 유사도 기반 잡음 제거, 물체 동일 시간에 병렬 기 때문에 단계별
recognition frame 적 방
한에 인식 않고 간성이 을 2차 연구로 얻어 대적인 추정에 항법 치 정 중 인 AM에 상 소
영상 는 소 흐름 반 관 인식, 렬 처 별 알
ework
2.1 유사도 소나 영상은 해 실제 물체와 나 영상에서 찾 서 비교한 후 체만을 관심 물체가 다른 의 크기, 형태 물체와 물체 임계값이다.
만일, 실제 로 선택되지 못 수 있다. 반대 다음 과정에서 아닌 관심 영 다음의 물체 행시간(process 보해준다.
본 연구에서 검출되는 인공 4가지 내부 식 델(object mode 서 원과 유사한 상은 영상 소 의 원을 영상 이용한다.
식 (2)는 소나 을 정의하며, 에서의 원의
기반 관심 후보 은 물체 형상의
와 영상 속 물체 찾고자 하는 물 후 유사도를 평가
후보로 선택한 물체와 구별될 태 등이 될 수 있
모델 간의 얻어
물체임에도 위 못하여도 다음 대로, 잘못된 물체
서 제거된다. 선택 역(Region of int 인식 및 추적 과 sing time)을 감
서 사용되는 물 공 표식물로서[12 식별 코드(I.D)를 el)은 원 형태이 한 형태를 검출 소나의 운용 환경
좌표계로 변환
1 0
1/
0
나의 아래보기 각 식 (3)은 소나가 크기(scale)를 정
보의 선택 왜곡과 순간적 체와의 비교가 어 물체 모델(object m
가하여 임계값 한다. 물체 모델은
수 있는 특징을 있다. 식 (1)에서 어진 유사도이며
조건을 만족하 영상에서 후보 체(잡음)라도 선 택된 관심 후보 terest, ROI)의 형 과정을 수행되게 감소 시킴으로써
물체는 영상 소나
2], 그림 6에서 보 를 갖는다. 인공 이며, 관심 후보 출하게 된다. 물체
경에 따라 변형되 환하는 수식은 식
0 cos
0 1/
각도( )에 의한 가 보는 관찰 영 정의한다. 여기서
인 잡음으로 인 어렵다. 이에 소 model)을 영상에 이상을 갖는 물 은 찾고자 하는 을 말하며, 영역 는 검출 며, 는 유사도
(1
하지 못하여 후보 보로 다시 선택될 선택될 수 있으나 보는 전체 영상이 형태로 축소되어 게 된다. 이는 수 실시간성을 확
나에 효과적으로 보는 것과 같이 표식의 물체 모 추출 시 영상에 체 모델인 원 형 되며, 실제 크기 식 (2)와 식 (3)을
(2
(3
원의 상하 변형 영역에 따른 영상 서, , 은 인공 인 소 에 물 는 역 출 도
)
보 될 나 이 어 수 확
로 이 모 에 형 기 을
2)
)
형 상 공
표식물의 해 변형된 옮겨진 원 는 영상 사용한다 는 허프- 통한 결과 정 값 이상
2.2 확 단일 영 은 소나 있다. 따라 하여, 관심 보를 제거 록 한다.
관심 후 기반의 신 진 관심 후 진다. 그림 용된 모습 보를 검증 체를 인식 에 따라 group. B와 치가 지속 룹의 표준 그룹은 실 에, 그렇지
외곽선 좌표이 된 원의 외곽선 원의 외곽선 좌표 상의 세로 화소수 다. 얻어진 물체 모 원 검출기 방법 과를 통해 원 형 상을 갖는 물체
확률적 방법에 의 영상 정보만으로
영상의 특성으로 라서, 본 논문에 심 후보들에 대 거하여 안정적인
후보에 대한 확률 신뢰도 평가 방법
후보들은 개별적 림 3은 개별 관 습을 나타낸다. 각 증하게 된다. Par 식한 관심 후보의
후보의 중심으 와 같이 잘못된 속적으로 퍼져 나
준 편차가 일정 실제 물체로 간주
지 못한 관심 후
Fig. 3. Initia
이며, , 은 아 좌표이다. , 표이다. 은 관찰
수이다. 본 논문 모델과 소나 영 법을 사용한다[13 형상에 대한 유사
를 관심 후보로
한 잡음 제거 로 선택되는 관심
로 인해, 잘못된 에서는 연속적인 대한 확률적 검증 인 수중 물체 인
확률적 검증 및 제 법이 사용되었다 적인 파티클 그 관심 후보에 초기
각 파티클 그룹 rticle group. A와 의 파티클들은 으로 수렴하게 되 된 관심 후보의
나가게 된다. 따 정 임계값 이하를
주하고 인식 단계 후보는 제거된다
alize of particle g
아래보기 각도에 은 영상 좌표 찰 영역의 범위 문에서는 512 pi 영상과의 유사도
3]. 허프-원 검출 유사도를 평가하여
로 선택한다.
심 후보는 잡음이 된 정보를 포함할 인 영상 정보를
증을 통해 잘못된 인식 수행이 가능
제거는 파티클 다. 앞 단계에서 그룹에 의해 검증
기 파티클 그룹이 룹은 한 개의 관심 와 같이 실제 수중 영상 정보가 얻 되며, 반대로 Pa 파티클들은 전체 따라서, 각 파티클 를 유지하는 파
계로 진행된다.
다. 각 파티클 그
groups
에 의 표계로 위이며, ixel을 비교 출기를 여 일
이 많 할 수 이용 된 후 능하도
필터 얻어 증되어 이 적 심 후 중 물 얻어짐 article 체 위 클 그 파티클 반면 그룹들
은 연속적인 영상에서 관심 기반의 불확실
,는 예측된 티클 위치이다 이며, 본 연구 하였다.
파티클의 신 해 얻어진다.
영상 정보로부 파티클에 동일 확률 사이에 가
실제 수중 물 영상 정보가 반대로 잡음 파티클들은 그 서, 표준 편차 룹을 대상 물 진행된다. 반면 러한 과정을 증을 통해 수중
2.3 후보의 후보의 인식 식을 위한 영상 정으로 나뉜다 려할 필요 없 수 있고 관심 리가 가능하다 서도 복수의 통해 발전된 얻을 수 있다 인식이 제대로
영상에서 관심 심 후보 위치에 실성을 반영한 식
, ,
파티클의 현재 다. 는 후보의 구에서는 10
신뢰도 평가를 위 여기서, 는 각 부터 얻는 표식 일하게 주어지는
가중치이다.
∙
물체를 인식한 얻어짐에 따라, 정보로부터 얻어 그 위치가 지속적 차가 일정 임계값 물체가 존재하는
면에, 그렇지 못 통해, 얻어진 관 중 물체가 존재
인식
식 단계에서는 관 상 전처리 과정 다. 전처리 과정에
이 1개 후보에 후보 영역에 한 다. 이와 동일하게 인식 방법이 적
인식 방법을 통 다. 사전 단계에서
로 되지 않을 경
후보를 평가한 대한 모션 정보 식 (4)로 정의한다
재 위치이고, 불확실성을 반 0(pixel)을 주어
위한 센서 모델 각 파티클의 신뢰 식물이 있을 확률
는 확률이다.
∙
관심 후보에 대 하나의 위치로 어진 잘못된 관 적으로 퍼져나가 값 이하를 유지하
위치로 간주하 못한 관심 후보는
관심 후보들에 하는 위치를 획
관심 후보 영역 정과 특징 비교를
에서는 다른 후 한하여 다양한 한정되기 때문에
게 실질적인 후 적용되어 가중치 통해 보다 정확한
서 최종 후보로 경우 거짓 물체로
한다. 이를 위해 보는 정규 분포 다.
(4
,은 이전의 파 반영한 파라미터 파티클을 예측
델은 식 (5)를 통 뢰도이다. 은 률이고, 는 과 는 두
(5
대한 파티클들은 로 수렴하게 되며 관심 후보에 대한 가게 된다. 따라 하는 파티클 그 하고 인식 단계로 는 제거된다. 이 대한 확률적 검 획득할 수 있다.
에 국한되어 인 를 통한 인식 과 후보의 영향을 고 한 방법을 적용할 에 빠른 영상 처 후보 인식 과정에 나 학습 방법을 한 인식 결과를 로 선택되었지만 로 판별하고 후 해, 포
4)
파 터 측
통 은 는 두
)
은 며, 한 라 그 로 이 검
인 과 고 할 처 에 을 를 만 후
보에서 탈 단계로 전 본 논문 과 같이 을 적용하 bilateral fi 하였다.
인공 표 identificati 상 행렬로 도를 평가 의 정의를
는 유 준 행렬이 유사도를 에 부여한 넘지 못하 평가되고
2.4 인 처음 인 한 비효율 는 것과 같 과정이 매 하게 된다 정이 수행 본 연구 방법을 사 으로 소나 체의 1차 을 연속적
탈락하게 된다.
전환된다.
문에서는 선택된 수행하였다. 인 하기 때문에 영역
filter를 수행하고
표식물의 내부 ion 방법을 사용 로 표현하여 기준 가하는 방법으로 를 따른다.
, 1
유사도이며, 와 이다. , 는 행렬 를 산출하여 가장 한다. 만일, ID별 하면 해당 물체 고 제거된다.
Fig. 4. Preproces
식된 물체의 추적 인식된 물체는 연 율을 줄이기 위해 같이, 추적이 수 매영상마다 거치 다. 단지, 추적의 행된다.
구에서는 추적 사용하였다[15]. 앞
나 영상의 1차원 차원 강도 히스토 적으로 계산하여
인식이 완료된
된 후보의 전처리 인식 단계에서 영
역을 매끄럽게 고 otsu-thresholdin
식별 코드 인 용하였다[14]. 내부 준 형상 행렬과 로서 행렬 간의 유
∑ ∑
는 검출된 형 렬의 원소 위치를 장 높은 유사도를 별 유사도가 너무
체는 우리가 찾는
ssing for candidate
적
연속된 시간에서 해 추적이 수행 수행된 물체는 후
치지 않고 추적 의 검증을 위해
알고리즘으로 평 앞서 주어진 초기 원 강도(intensity 토그램을 서로 여 추적한다.
된 물체는 다음
리 과정으로 그 영역 기반 인식
하기 위해 med ing 기법으로 이
인식은 shape m 부 영역의 형태를 과 비교를 통해
유사도 비교는
형상 행렬과 ID별 를 가리킨다. 각
를 갖는 ID를 표 무 낮아 최소임계 는 물체가 아니
e recognition
서 인식의 반복을 된다. 그림 2에서 후보 검출, 인식
알고리즘만을 간헐적으로 인식
평균-이동(Mean 기 물체 위치를 y) 영상과 인식된
비교하여 무게 추적
그림 4 기법 dian과 이진화
matrix 를 형 유사 식 (6)
(6)
별 기 ID별 표식물 계값을 니라고
을 통 서 보 등의 수행 식 과
n-shift) 시작 된 물 중심
3. 인식
영상 소나를 치 인식을 위해 적인 거리와 수중 로봇의 위 논문에서는 다 방법 중 하나인
수중 로봇의 같이 내부 관 정보의 융합을 계로 구분된다 첫 번째 단 반으로 예측(p (Inertial Measu 융합을 통해 법을 위한 EK
여기에서 x, y 각도(자세) 정 서의 속도 정 DVL의 정보 위치 인식 정 치 인식 정보 한 위치 정보를
두 번째 단 취득된 물체 단계이다. 이 정의된다.
여기에서 는
는 인식된 상태 벡터의 추 와 함께 인식 준다.
식된 수중 물체
를 통해 인식된 해 사용될 수 있
각도 정보, 그 위치를 추정할 다양한 로봇의
인 EKF 기반의 의 위치 인식을 관성센서와 초음
을 통해 이루어진 다.
단계는 수중 로봇 prediction)하는 단 urement Unit)와
추측항법(dead-r KF의 상태벡터는
y, z는 수중 로봇 보이다. 그리고 정보이다. 이렇게 융합을 통해 관 정보를 제공한다 보는 시간에 따른
를 제공할 수 없 단계에서는 외부
정보를 이용하 과정을 위한 EK
는 (7)에서 정의된 수중 물체의 위 추정을 통해 EK
된 수중 물체의
를 이용한 EK
수중 물체는 수 있다. 인식된 물
리고 식별된 코 수 있는 것이다 위치 인식을 위 SLAM 기법을 위한 EKF SLA 음파 영상에 의해
진다. 전체 과정
봇의 위치를 내부 단계이다. 이 단 DVL (Doppler reckoning)을 수 는 식 (7)과 같이
봇의 위치 정보이 고, , , 는 로
게 정의된 상태 관성센서 기반의 다. 하지만, 관성센 른 오차의 누적으 없게 된다.
부 센서인 초음파 하여 위치를 보정 KF 상태 벡터는
된 수중 로봇의 위치 정보이다.
KF SLAM은 수 의 위치에 대한
KF SLAM
수중 로봇의 위 물체에 대한 상대 코드를 이용하여 다. 이를 위해 본 위해 적용되어온 을 적용하였다.
AM 은 그림 5와 해 인식된 물체 정은 크게 두 단
부 관성 센서 기 단계에서는 IMU Velocity Log)의 수행한다. 추측항 이 정의된다.
(7
이며, , , 는 로봇 좌표계 상에 벡터는 IMU와 의 수중 로봇의 센서 기반의 위 으로 인해 정확
파 영상으로부터 정(correction)하는 는 식 (8)과 같이
(8
의 위치 정보이며 이렇게 정의된 수중 로봇의 위치 정보를 제공해 위 대 여 본 온
와 체 단
기 U 의 항
7)
는 에 와 의 위 확
터 는 이
)
며, 된 치 해
Fig. 5.
EKF S 정보 교합 서는 물체 께 일반적 는 확률적 하였다. 식 시에 적용 수 있는 록 하였다 은 수중 행 시스템
영상 소 위치 추정 양과학기술 험용 수조
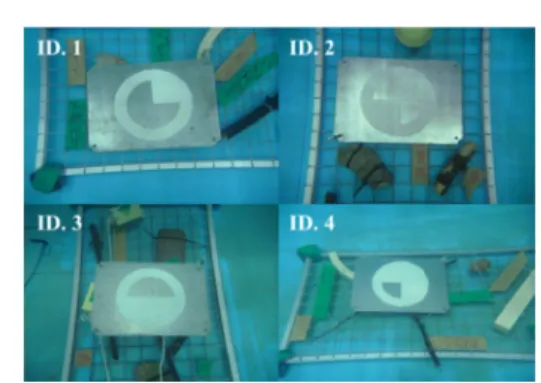
수중 인 22cm의 원 네 가지 종 가로 3m, 다. 인공 복잡한 수 조 바닥 나 영상을 직접적으 로 충분하
실험에 다. 두 가 인하기 위 이와 함께
EKF SLAM fusing
LAM을 수행함 합(data associatio 체 인식 과정에 적인 거리 센서 적 거리(Mahalano
식별 코드와 확 용하여, 초음파
일시적인 오인 다. 이러한 과정 로봇의 안정적 템 개발의 기반을
4
소나를 이용한 정 정보인 EKF
술원 부설 선박 조에서 검증 실험
인공 표식물은 원형 모양이 새 종류의 인공 표
세로 3m 정사각 표식물 주변에는 수중 환경을 재연
전체에 대한 외 을 통한 물체 인 으로 영향을 줌으 하다고 볼 수 있
사용된 수중 로 가지 서로 다른
위해 2종류의 IM 께 DVL과 영상
g inertial sensors
함에 있어 가장 on) 과정이다. 이
서 얻어지는 식 기반의 정보 교 nobis distance)를 확률적 거리 기반
영상의 물체 인 식에 대한 정보 정을 통해 본 논
인 위치 정보를 을 제공해 줄 수
4. 검증실험
수중 물체의 구 SLAM의 성능을 박해양플랜트연구 험을 수행하였다
그림 6에서 보 새겨진 인공 표 표식물은 깊이 1m 사각형 경로의 각
는 다양한 형태 연하였다. 환경적 외부 물체의 배치 인식은 인공 표 으로 제안된 기 있다.
로봇은 센서 패 센서 조합에 의 MU로 AHRS와 상 소나가 동시에
and imaging son
핵심이 되는 부 이를 위해 본 논 식별 코드 정보와
교합에 주로 사 이용한 방법을 반의 정보 교합을 인식 과정에서 얻
보를 제거할 수 논문에서 제안된 를 제공하여 자율 수 있다.
구조와 수중 로 을 확인하기 위해 구소 내 해양장비 다.
보는 것과 같이, 표식물을 사용하 m 아래 수조 바 각 모서리에 배치 태의 물체가 배치 적 제약으로 인해
치는 어려웠으나 식물 주변 환경 법의 검증용 환
패키지 형태로 구 의한 항법 결과를
RLG가 사용되 에 사용된다. 표
nar
부분은 논문에 와 함 사용되 을 이용 을 동 얻어질 있도 방법 율 주
로봇의 해 해 비 시
지름 하였다. 바닥에 치하였 치되어 해 수 나, 소 경만이 환경으
구성된 를 확 되었다. 표 1은
Fig.
Sensor AHRS
RLG DVL Imaging
sonar
실험에 사용된 지의 IMU를 상 로봇에서도 보편적으로 활 위해 필요하며 할 수 있는 센 증하기 위해 수
검증 실험은 로 총 4바퀴를 확인하고, AH 성능 결과를 비
4.1 인공 표 수중 인공 도에 설치됨에
6. Artificial landm
Fig. 7. Experime
Table 1. Specifi
Name Microstrain 3DM-GX3-25 Honeywell HG1700
Linkquest NavQuest600 Mirco
Soundmetrics DIDSON
된 장비 및 정보 사용하여 실험한 도 통상적으로 활용되기 위한 며, RLG는 고성 센서이므로 두 가
수행하였다.
은 수중 로봇이 를 이동하며 수중 HRS 조합과 RL
비교, 분석한다.
표식물 인식 결과 표식물의 설치 에 따라 영상 소
marks for imaging
ental environment
cation of Sensors
Infor , , , ,
0 , ,
, ,
o , ,
Objec
보의 내용이다.
한 이유는 AHR 많이 사용되고 위치 추정 알고 성능 수중 로봇에 가지 경우에 모
인공 표식물 위 중 인공 표식물 LG 조합에서 얻
과
위치가 수면에 소나의 아래 보기
sonar
t
s
rmation
/ / m/
/ m/s ct , θ
실험에서 두 가 RS는 수중과 지 있는 형태이고 고리즘의 검증을 에 활용 시 적용 모두 유용성을 검
위 정사각 경로 물의 인식 성능을 얻는 EKF SLAM
에서 깊이 1m 정 기 각도는 20도 가 지 고 을 용 검
로 을 M
정 도
이고, 표식 서 인식이
그림 8 일부분을 변에 위치 확인할 수 지러운 영 물을 볼 수 하단)과 윤 보면 인공 것을 확인 인식이 수 여진다.
인공 표 면, 그림 인해 표식 생하는 초 나타나게 어 검출이 상단에 위 영상을 얻 하게 하여 의 영상을
(a) Ori
식물과 영상 소 이 수행되었다.
8은 ID.2의 영상 을 발췌하여 나타 치한 철망과 물건 수 있다. 윤곽선 영상을 볼 수 있
수 있다. 물체 모 윤곽선 영상을 공 표식물 가운 인할 수 있으며, 수행되어 ID.2를
표식물 인식이 올 9-(a)와 같이 인 식물이 오염된 경 초음파의 강한 반 되고 이것이 표 이 어려워진다. 그 위치하여 미인식 얻기 위해서는 소 여 소나 영상을 을 얻으면 사물과
iginal Fig. 8. Resu
(a) Noisy landmark Fig. 9. Example
소나 사이 거리는
상처리 수행 과정 타내었다. 실험
건들은 그림 8-(
검출(그림 8-(b 있지만, 그 가운데
모델(object mode 비교한 유사도 운데에 유사도 값
, 이 곳을 후보 를 가리키고 있음
올바르게 수행되 인공 표식물 주 경우이다. 표식물 반사파로 인해 표식물에도 영향
그림 9-(b)는 인 식된 사례이다.
소나를 물체와 얻게 된다. 영 과 영상소나가 일
(b) Edge ult of identification
k (b) Blur e of unrecognized
는 평균 1.5m 내
정 및 인식 결과 환경에서 표식물 (a) 소나 영상에 b)) 후에도 주변의 데 원형의 인공
el, 그림 8-(a) 오 도 지도(그림 8-
값이 높게 나타 보로 선택하고 올 음을 그림 8-(a)에
되지 않은 경우를 주변의 강한 잡음
물 주변 철망에서 소나 영상에 환 향(오염)을 미치게 인공 표식물이 영
영상 소나로 사 비스듬히 아래로 상소나를 통해 일직선이 된 영
(c) Similarity ma n (ID.2)
rred landmark d landmark
내외에
과 중 물 주 에서도 의 어 표식 오른쪽 (c))를 타나는 올바른 에 보
를 보 음으로 서 발 환하게 게 되 영상의 사물의 로 향 사물 역(영
ap
상의 중간)은 대로 영상의 는 초음파의 그림 9-(b)에서 에 따라 인공 문에 표식물의
4.2 EKF SL 실험에 사용 compass 정보가 많은 센서 장 에서는 [16]의 항법 정보로 사 알고리즘에 사 를 나타낸다.
그림 10는 A 과이다. 그림 수행 후에는 보이지 않는다 과는 true 값(r 결과는 기존 정 그림 11과 그 있다. 시간이 RMSE(평균 오
반면에, SLA 나 더 이상 발 의 ‘A’에서 가 할 때 1회 때 이때부터 추측
Ta
Sensor
AHRS
RLG
DVL Imaging
sonar
주변에 비해 사 위쪽 또는 아래
총량이 적기 때 서 인공 표식물은 공 표식물의 밝기 의 검출 및 인식
LAM 실험 결과 용된 AHRS는 주
가 왜곡되거나 장비이다. 이러한
의 방법을 적용하 사용하였다. 그 사용된 각 센서별
AHRS 센서 조합 10-(a)에서 보는 추측 항법 결과 다. 하지만, 시간
reference)과 멀어 정사각 경로를 그림 12의 Refere
지남에 따라 오차)는 발산하고
AM 결과는 RM 발산하지 않고 유 가리키는 것은 로
관찰한 인공 표 측 항법의 추정
able 2. Error cova
Information
, , /
, , , , m/
, , , , m/s
Range Bearing
사물의 형상이 더 래쪽으로 갈수록
때문에 영상이 은 영상의 위쪽에 기가 흐리고 선
이 어렵다.
1 (AHRS 조합 주변 전자기장에
angular velocity 한 문제를 줄이기
하여 AHRS 정보 리고 표 2는 항 별 오차의 분산(
조합의 EKF SLA 는 바와 같이 정 과와 SLAM 결과 간이 지남에 따라
어지는 것을 볼 올바르게 추종하 ence와 오차 결과
추측 항법의 고 있음을 볼 수 MSE 수치가 일 유지됨을 알 수 로봇이 정사각 경
표식을 다시 발 위치와 SLAM
ariance for EKF S
n Error c
/ 1
/ 0.0
/ 0
/ 0.00
s 0.
0
더 뚜렷하다. 반 록 사물에 부딪히 뚜렷하지 않다 에 위치한다. 이 명하지 않기 때
합)
에 의해 magnetic y 정보에 잡음이 기 위해 본 실험 보를 보정한 후 항법(EKF SLAM
(error covariance
AM을 수행한 결 정사각 경로 1회 과가 큰 차이를 라 추측 항법 결 수 있고 SLAM 하고 있다. 이는 과에 잘 나타나 오차는 커지고 수 있다.
정 시간 증가하 수 있다. 그림 11 경로를 2회 수행 발견한 시간이다 M의 추정 위치가
SLAM
covariance ( )
1 / 01 /
.5 / 05 /
05 / 0.05
1 °
반 히 다.
이 때
c 이 험 후 M) e)
결 회 를 결 M 는 나 고,
하 1 행 다.
가
F
(a
(b
(c
(d) T = Fig. 10. Result of
a) T = 157.74 s
b) T = 298.08 s
c) T = 421.62 s
= 507.38 s (finished EKF SLAM (AHRS d)
S combination)
Fig. 11. Po
급격히 바뀌게 정보가 잘못되 와 종료 위치 종료 위치는 x 0.02m, y= -0.1 부터 얻어진 외 항법 결과보다
4.3 EKF SL 그림 13은 SLAM 실험을 센서의 정확도 DVL, 영상 소 경로가 큰 차 치를 추정한 표 낸 그림 16의 RLG 실험 결 높기 때문에 나 와 그림 15에 과와 유사하게 반면, SLAM 을 볼 수 있다 서 장비에서도
osition error com
Fig. 12. R
게 된다. ‘B’는 re 되어 나타나는 오
가 동일함을 고 x= -0.46m, y= -0 16m로 얻어졌다 외부 정보에 의 다 위치 추정 성
LAM 실험 결과 IMU센서로 R 을 수행한 결과이 도가 높은 RLG는 소나를 이용한 차이를 보이지 않
표 3의 결과와 결과를 확인하 결과에서 더 정확
나타나는 결과로 나타난 시간별 게 추측 항법 결
결과는 일정 시 다. AHRS 결과에 도 영상 소나를
pared with Refere
RMSE (AHRS)
eference로 사용된 오류이다. 본 실 고려할 때 추측 0.40m이고, SLA 다. 이러한 결과 의한 항법(SLAM 능이 우수함을
2 (RLG 조합) RLG를 사용하 이다. 전자기장의 는 DVL과의 추
SLAM 결과와 않는다. 아울러,
최종 평균 오차 하여도 AHRS 실 확하다. 이것은 로 볼 수 있다.
별 위치 오차를 결과는 서서히 시간 증가하다가 에는 미치지 못 이용한 항법이
ence (AHRS)
된 indoor GPS의 실험의 시작 위치 항법이 추정한 AM 결과는 x=
과는 영상 소나로 M) 수행 시, 추측
나타낸다.
하여 추측항법과 의 영향이 없고 추측 항법 결과와 비교하여 추정 인공 표식물 위 차(RMSE)를 나타 실험 결과에 비해 RLG의 성능이 하지만 그림 14 보면 AHRS 결 발산하고 있는 가 유지되고 있음 못하나 고성능 센 유효함을 검증 의 치 한
- 로 측
과 고 와 정 위 타 해 이 4 결 는 음 센 증
해 준다.
Fig.
Table
ID Ax
1 X
Y
2 X
Y
3 X
Y
4 X
Y
Fig. 13. Res
14. Position error
Fig.
3. Estimated land
xis Reference (i-GPS) X 0 Y 0 X 2.903 Y -0.007 X 2.878 Y -2.858 X -0.106 Y -2.771
sult of EKF SLAM
r compared with
15. RMSE (RLG)
dmarks position w
Estimated position by AHRS/DVL
-0.095 (-0.095) -0.192 (-0.192) 2.863 (-0.040) -0.061 (-0.054) 3.012 (0.134) -2.948 (-0.090)
0.078 (0.184) -3.143 (-0.372)
M (RLG)
Reference (RLG)
with AHRS and RL
* unit n Estimated posi by RLG/DV 0.016 (0.016 0.040 (0.040 2.936 (0.033 -0.006 (-0.00 2.928 (0.048 -2.862 (0.004 0.014 (0.120 -2.877 (-0.10
LG