건설 및 농기계용 자동변속기 변속제어기 개발
Development of Automatic Transmission Control Unit for Construction Equipments and Agricultural Vehicles
정규홍 Gyu Hong Jung
1. 서 론
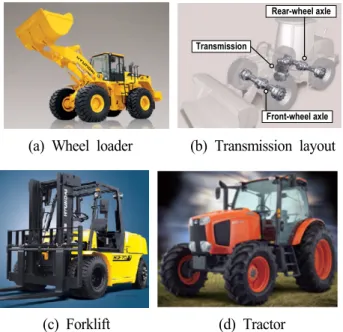
내연기관 엔진을 동력원으로 하는 차량은 엔진의 동력특성이 주행부하에 의해 결정되는 주행 및 연비 성능에 적합하지 않으므로 불가피하게 변속기를 이 용하여 동력특성을 변환한다. 자동변속기는 주행상태 에 적절하게 변속단수의 변화가 자동으로 이루지는 변속기로 초기에는 주로 승용차를 대상으로 개발되 었으나 운전편의성의 장점으로 최근에는 건설기계 및 농기계에도 적용이 확대되고 있다. Fig. 1은 건설 중장비인 휠 로더와 지게차, 농기계로 대표적인 트랙 터를 보여준다.
Front-wheel axle Rear-wheel axle Transmission
(a) Wheel loader (b) Transmission layout
(c) Forklift (d) Tractor Fig. 1 Construction equipments and tractors
자동변속기와 관련된 국내기술수준을 살펴보면 승 용차용은 대기업에서 오랜 기간에 걸쳐 연구개발을 수행한 결과 상당한 수준에 도달한 반면 건설기계 및 농기계용은 생산대수도 적고 완성차 업체의 기술 개발 능력과 의지가 높지 않아 기술수준이 상당히 미흡하여 일부 기계식 자동변속기는 국산화되었으나 전자제어방식 자동변속기는 아직까지도 전량 수입에
의존하고 있는 실정이다.
건설기계 및 농기계용 전자식 자동변속기의 국산 화 연구는 약 10여 년 전부터 생산규모가 확대되고 치열한 시장경쟁에서 부가가치가 높은 부품에 대한 국산화 필요성이 대두됨에 따라 다양한 국책사업을 통해 연구개발이 시도된 바 있고 현재도 건설기계와 농기계용 무단변속기 개발연구가 진행되고 있으나 아직까지 양산으로 이어지고 있지는 않다. 그러나 그 동안 축적된 기술을 바탕으로 가까운 시일 내에 양 산개발에 성공할 수 있을 것으로 기대된다.
최근 급속하게 발전하는 자동차 기술의 전자화는 건설 및 농기계로 응용분야가 확대되고 있다. 변속제 어기(Transmission Control Unit, TCU)는 자동변속기의 변속제어와 관련된 제반 기능을 담당하므로 기어 열 (gear train), 토크 컨버터(torque converter), 유압제어시 스템의 기계적인 부품과 더불어 변속기 성능을 결정 하는 핵심부품이다. 특히, 환경관련 규제가 점차 강 화됨에 따라 연비와 효율뿐만 아니라 주행성능 향상 의 설계목적을 동시에 달성하기 위하여 마이크로 컨 트롤러와 주변회로로 구성되는 PCB 하드웨어와 변 속제어 운영 프로그램인 펌웨어(firmware) 기술에 대 한 연구개발이 지속적으로 이루어지고 있다. Fig. 2는 변속기 전문개발업체인 독일 ZF사에서 개발된 변속 제어기 외형을 보여준다.
Fig. 2 ZF-TCU for construction equipments
변속제어기는 차량 주행상태, 운전자 의지, 변속기 작동상태 등과 같은 제반정보를 바탕으로 최적의 변 속 비를 결정하고 변속 시 발생되는 충격이 최소화
되도록 변속작동기구를 제어하는 기능을 담당한다.
자동변속기에 대하여 요구되는 성능수준이 높아짐에 따라 이를 만족시키기 위해서 고성능의 변속제어기 하드웨어를 적용하고 변속 알고리즘 및 제어로직을 프로그램으로 구현하는 펌웨어 기술이 지속적으로 발전되어 왔으며 이러한 추세는 날로 엄격해지는 환 경관련 규제와 차량에 도입된 전자제어시스템이 고 도화됨에 따라 더욱 가속화될 전망이다. 변속제어기 펌웨어 개발을 위해서는 토크컨버터, 기어열, 유압시 스템, 클러치 등으로 구성되는 자동변속기의 구조뿐 만 아니라 동력전달체계의 변속특성에 대한 엄밀한 이해와 풍부한 개발경험이 요구된다. 특히, 마이크로 컨트롤러에서 수행되는 운영 프로그램인 펌웨어에서 는 입출력 신호 처리와 제어 알고리즘의 연산을 실 시간으로 처리하므로 프로그램 개발과 성능검증을 위해서는 다이나모 또는 차량에 장착되어 작동되는 변속기를 변속제어기에 연결해서 시험해야 하므로 많은 비용과 오랜 기간의 개발노력이 요구된다.
자동변속기 개발에 있어서 기계적인 변속장치는 선진제품을 분해하여 각 부품을 분석한 후 역설계를 통하여 시제품을 제작하고 성능평가 및 성능개선 등 의 연구개발이 가능하다. 이에 비하여 변속 알고리즘 과 변속 제어로직이 펌웨어 형태의 프로그램으로 구 현된 변속제어기는 펌웨어 분석을 통한 역설계가 불 가능하므로 독자적인 연구와 반복적인 시험을 통해 서만 개발이 가능하다. 이는 전자제어장치(Electronic Control Unit, ECU)로 개발되는 전자제어 시스템의 공통적인 특성이지만 엔진제어기는 엔진을 개발하는 대기업에서도 자체적으로 펌웨어 개발을 하지 않고 전문기업에서 제공하는 운영 프로그램을 도입하여 적용하지만 변속제어기는 변속기 마다 동력전달체계 가 다르므로 범용으로 적용되는 펌웨어가 없어 자동 변속기를 개발하는 업체에서 스스로 적절한 기능을 구현해야 하는 점이 다르다. 이러한 점에서 변속제어 기 운영 프로그램 개발은 자동변속기 국산화 개발에 있어서 어려운 과제 중 하나로 대두되고 있다.
전술된 바와 같이 선진사 변속제어기에 구현된 펌 웨어는 소스 프로그램(source program)을 확보하지 않 는 한 기능분석이 불가능하지만 변속제어기가 정상 적으로 작동하는 상태에서 획득된 입출력 신호를 분 석하면 어느 정도 변속제어 기능에 대해 파악할 수 있다. 본 해설기사에서는 건설기계 및 농기계용 자동 변속기 국산화 개발과제에서 수행된 변속제어 알고 리즘 개발방법과 성과를 소개하였다.
2. 변속제어기 개발 방식
국산화 개발이 완료된 승용차 자동변속기의 개발 과정과 현재 개발 중에 있는 건설기계 및 농기계용 자동변속기의 연구동향으로부터 변속제어기 개발방 식의 다음과 같이 분류될 수 있다.
1) 독자 연구개발
변속기 구조 및 엔진과 부하에 따른 변속특성 분 석을 바탕으로 변속제어 알고리즘과 로직을 독자적 으로 설계하는 방식이다. 기존과 다른 방식의 동력전 달체계로 변속기를 설계하는 경우나 자동변속기 기 술을 선도하는 선진사는 벤치마킹 대상이 없으므로 축적된 기술을 바탕으로 새로운 응용기술을 개발하 는 형태이다.
2) 기술이전 개발
선진사 변속기에 대한 라이센스를 받아 생산하면 서 점진적으로 변속제어와 관련된 기술을 습득하여 독자 모델을 개발하는 형태이다. 선진사와 기술협력 을 하여도 변속제어기 소스코드는 얻지 못하지만 변 속제어 알고리즘이 설명된 변속제어 사양서 (specification)는 제공되므로 이를 실시간으로 수행되 는 프로그램으로 구현하면 상대적으로 변속제어기 개발이 용이하며, 국내 개발된 승용차용 자동변속기 의 개발방식에 해당된다.
3) 역 설계 개발
선진사 변속기를 분석하여 이를 바탕으로 독자개 발 변속기에 적용 가능한 변속제어기를 개발하는 방 식으로 국내에서 수행되고 있는 건설기계 및 농기계 용 자동변속기 개발연구에서 채택되는 방식이다. 변 속제어기 분석대상은 PCB 하드웨어 회로와 운영 프 로그램인 펌웨어로 분류될 수 있다. 하드웨어 회로는 상용 IC로 설계된 경우에는 어느 정도 기능분석이 가능하고 최근 ASIC(Application Specific IC)으로 설 계되었다 하여도 디지털 회로의 신호처리 기능 구현 에는 큰 어려움이 없으므로 PCB 하드웨어 회로개발 이 변속제어기 개발에서 차지하는 비중은 그다지 크 지 않다. 이에 비하여 펌웨어는 변속제어의 핵심기능 을 담당하는데 비하여 비휘발성(non-volatile) 메모리 에 저장된 프로그램을 분석하는 것은 불가능하기 때 문에 변속제어 기능분석 방법을 개발해서 활용해야 한다.
본고에서는 선진사 변속제어기 펌웨어 분석방법으 로 TCU 성능분석기(TCU analyzer)를 이용하여 실차에 서의 변속시험결과를 모니터링하는 방식과 변속기 시 뮬레이터(transmission simulator)를 이용하여 TCU 입력 신호 모사를 통해 변속제어기를 정상작동 시킨 후 변 속시험결과를 획득하는 방식에 대해 설명하고자 한다.
3. TCU 성능분석기(TCU analyzer)
변속제어기 기능의 핵심적인 내용은 자동변속모드 에서 변속시점을 결정하는 변속선도(shift map)와 변속 이 진행될 때 짧은 시간에 급격한 속도 변화에 의해 발생되는 변속충격을 저감시키는 변속제어기법이다.
변속선도는 적용분야에 따라 다소의 차이가 있지만 차속, 입력토크 또는 엔진 스로틀에 대한 선도이므로 실차시험 시 변속되는 시점을 파악하면 분석이 가능 하며, 변속제어는 다양한 변속조건을 고려하여 변속제 어기에서 연산된 결과가 클러치 압력을 변화시키므로 변속 시 클러치 압력을 변화시키는 비례 솔레노이드 밸브 전류를 모니터링하면 변속제어기법에 대한 분석 이 가능하다. 따라서 선진사 자동변속기가 탑재된 실 차에 대한 변속시험결과를 수집할 수 있다면 선진사 변속제어기의 기능을 분석할 수 있고 이를 활용하면 개발 TCU의 기본설계를 신속하게 진행할 수 있다.
Fig. 3은 ZF사 휠로더 자동변속기의 실차시험 분석 을 위해 개발된 TCU 성능분석기를 나타내고 Fig. 4 는 TCU 성능분석기의 신호연결을 보여준다.1-2) 실차 시험에서 변속제어를 담당하는 ZF사 TCU의 입력신 호를 병렬로 TCU 성능분석기에 연결하여 운전자의 변속레버 조작에 따라 나타나는 비례 솔레노이드 밸 브 전류 및 PWM 듀티율, 속도센서로부터 연산된 회 전속도 등의 변속특성을 실시간으로 모니터링하고 직렬통신으로 PC로 전송하여 데이터를 수집한다.
Fig. 5는 PC에서 수행되는 모니터링 프로그램 메인 창을 보여준다. TCU 성능분석기를 개발하기 위해서 는 TCU 커넥터에 대한 입출력 신호사양과 CAN 통 신의 경우에는 메시지 식별자(message identifier) 통신 규약(protocol)에 대한 정보를 알아야 한다.
Fig. 3 TCU analyzer for wheel loader TCU
ZF-TCU
ZF-TCU Analyzer
4WG- 260
Diagnosis Mobidig 2001
68pin Terminal Tester
Fig. 4 TCU analyzer signal connection diagram
Fig. 5 Monitoring program of TCU analyzer
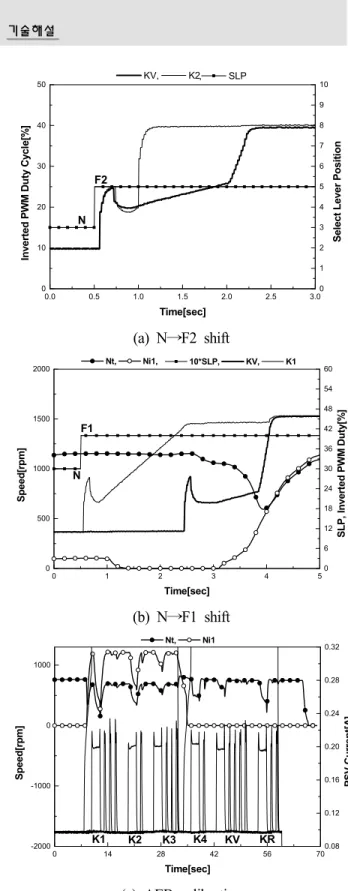
Fig. 6은 설계된 TCU 성능분석기를 ZF사 자동변속 기가 탑재된 휠로더에 연결하여 수행된 실차시험결 과이다. Fig. 6(a)는 운전자가 변속레버를 조작하여 발생되는 N→F2 변속 시 결합되는 KV와 K2 클러치 에 작용하는 PWM 듀티율의 궤적을 나타낸다. 전진 4단 후진 3단의 휠로더 자동변속기는 전진 2단에서 KV와 K2 클러치가 결합되며 변속 시 비례 솔레노이 드밸브에 인가되는 PWM 듀티율 궤적을 살펴보면 먼저 K2 클러치 결합을 완료한 후 KV 클러치 PWM 듀티율 기울기로 결합을 제어한다. Fig. 6(b)는 가속 페달을 밟아서 중립상태에서 터빈속도가 1,140rpm일 때 변속레버 조작으로 발생되는 N→F1 수동변속 시 험결과를 나타낸다. 토크입력이 높은 상태이므로 K1 클러치 결합을 완료한 후 KV 클러치의 결합제어로 변속이 이루어짐을 확인할 수 있다. ZF TCU의 제어 주기는 5ms의 샘플링주기로 측정된 PWM 듀티율 데 이터로부터 20ms(50Hz)로 추정되었다. Fig. 6(c)는 클 러치 특성을 보정하기 위하여 수행되는 AEB calibration 시험결과이며 보정 알고리즘은 순차적으로 각 클러치에 대해서 인가되는 전류를 점차적으로 증 가시키면서 클러치 결합에 의하여 저하되는 터빈속 도의 기울기로 특성을 파악하는 것으로 분석된다.
0.0 0.5 1.0 1.5 2.0 2.5 3.0 0
10 20 30 40
50 KV, K2
Inverted PWM Duty Cycle[%]
Time[sec]
0 1 2 3 4 5 6 7 8 9 10
F2 N
, SLP
Select Lever Position
(a) N→F2 shift
0 1 2 3 4 5
0 500 1000 1500 2000
F1
N
Nt, Ni1,
Speed[rpm]
Time[sec]
0 6 12 18 24 30 36 42 48 54 60
SLP, Inverted PWM Duty[%]
10*SLP, KV, K1
(b) N→F1 shift
0 14 28 42 56 70
-2000 -1000 0 1000
Nt, Ni1
Speed[rpm]
Time[sec]
0.08 0.12 0.16 0.20 0.24 0.28 0.32
KV KR K3 K4
K1 K2
PSV Current[A]
(c) AEB calibration
Fig. 6 Vehicle tests of ZF-TCU analyzer
Fig. 7은 트랙터에 탑재되는 ZF사 T7140 자동변속 기의 실차 변속시험 분석을 위해 개발된 TCU 성능 분석기이고 Fig. 8은 후진 주행 중 상향변속 버튼을 눌렀을 때 발생되는 R2→R3 실차변속시험결과이다.
트랙터 자동변속기는 토크 컨버터 없이 엔진 축이 변속기에 직결되며 엔진은 스로틀에 비례하는 속도 제어 모드로 작동하므로 변속이 개시되면 KA 클러
치를 해제하면서 KB 클러치 결합이 진행됨에 따라 변속부하로 엔진속도에 진동이 발생하게 된다. 이후 변속이 진행됨에 따라 엔진속도에 대한 출력축 속도 를 나타내는 속도비가 짧은 시간에 변화됨을 알 수 있다.
Fig. 7 TCU analyzer for tractor TCU
0.0 0.5 1.0 1.5 2.0 2.5 3.0
0 500 1000
nE,
Engine speed[rpm]
Time[sec]
0 5 10 15 Speed ratio, KA, KB
Speed ratio*10, PSV voltage[V]
Fig. 8 R2→R3 shift(ZF T7140)
4. 변속기 시뮬레이터(Transmission simulator)
시뮬레이터는 동적특성을 갖는 기계적인 시스템을 모사할 수 있는 장치이다. 최근 전자제어를 이용한 자동차 기술이 급속히 발전하면서 개발비용 및 시간 절감과 동시에 시험 안전성을 확보하기 위하여 기계 적인 시스템의 특성을 근사적으로 모사할 수 있는 시뮬레이터를 이용한 연구개발이 일반화되고 있다.
변속동특성에 대한 엄밀한 이해와 풍부한 개발경험 이 요구되는 변속제어기 펌웨어를 단기간에 설계하 기 위해 수행되는 실차 변속시험은 복잡하게 구현된 변속제어 알고리즘을 면밀하게 파악하는데 한계가 있다. TCU 성능분석기를 이용한 역 설계의 단점을 보완하는 방법은 변속기가 연결되지 않은 상태에서 입력 신호모사를 통해 TCU만을 정상적으로 작동시 키면서 출력신호를 분석하는 변속기 시뮬레이터의 활용이다.
Fig. 9는 ZF사 휠로더 자동변속기에 적용되는 TCU 를 대상으로 개발된 변속기 시뮬레이터이며 이를 활 용하면 상용 TCU의 변속선도, 변속제어 알고리즘, 진단 및 오류검출 알고리즘 등을 파악할 수 있으며
독자적으로 개발되는 TCU의 운영 프로그램 개발과 기능검증에도 응용될 수 있다. Fig. 10은 개발된 변속 기 시뮬레이터의 입출력 신호선도를, Fig. 11은 PC에 서 수행되는 모니터링 프로그램의 메인 창을 보여준 다.3-4)
Display ZF-TCU(4WG-260)
ZF-TM Simulator Proportional
Solenoid Valve Module
Fig. 9 Wheel loader transmission simulator
ZF-TCU +24V Power N
ESpeed sensors N
TN
CN
OParking brake
Dir.
T/C SUMP Temperature sensors
Speed Controller DW-3
Auto/Manu
K1 Electro- hydraulic control unit
K2 K3 KV
Warning Diagnosis
tool
Pressure cut-off Filter contamination
CAN Digital input
K/D KR K4
ECU MCU
Key-onFig. 10 Transmission simulator I/O signals
Engine Speed Command Shift Map
PSV Current profiles Engine Speed Ramp
Shift Time Interval Shift Time Delay
Fig. 11 Monitoring program of T/M simulator
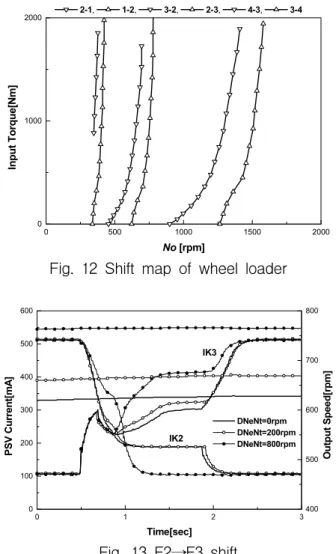
Fig.. 12는 변속기 시뮬레이터를 이용하여 분석된 전진 4단, 후진 3단 휠로더 자동변속기 TCU의 전진 변속선도를 나타낸다. 후진 변속선도는 전후진 1, 2,
3단의 기어비가 동일하므로 전진 변속선도와 동일하 다. 파악된 변속선도에서는 변속기 입력토크가 작은 경우에는 2-1 하향변속이 발생하지 않으며 역구동의 시에는 입력토크가 영인 출력축 속도를 적용하는 것 으로 추정된다.
Fig. 13은 자동변속모드에서 변속기 입력토크에 따 른 변속제어특성을 살펴보기 위하여 변속이 개시될 때 토크 컨버터 속도 차를 달리하여 수행된 F2→F3 상향변속 시험결과이다. 엔진과 터빈의 속도 차가 클 수록 변속기 입력토크는 증가되며 이에 따라 TCU는 변속 중 작동 및 해제되는 클러치의 비례 솔레노이 드밸브 구동전류궤적을 높게 제어함을 알 수 있다.
Fig. 13의 기어변속 결과로부터 충전영역, 토크영역, 관성영역에서의 해제 클러치와 작동 클러치 전류궤 적을 분석하여 활용하면 독자적인 변속제어 알고리 즘 설계가 가능하다.
0 500 1000 1500 2000
0 1000
2000 2-1, 1-2, 3-2, 2-3, 4-3, 3-4
Input Torque[Nm]
No [rpm]
Fig. 12 Shift map of wheel loader
0 1 2 3
0 100 200 300 400 500 600
IK2 IK3
PSV Current[mA]
Time[sec]
400 500 600 700 800
Output Speed[rpm]
DNeNt=0rpm DNeNt=200rpm DNeNt=800rpm
Fig. 13 F2→F3 shift
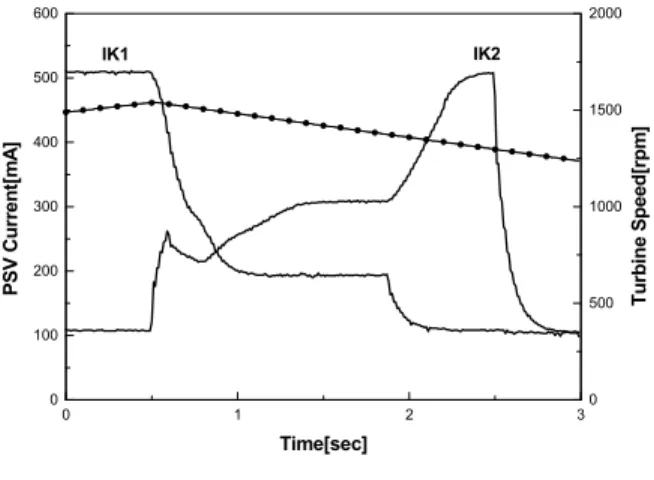
Fig. 14는 통상적인 변속시간보다 길게 변속응답을 변속기 시뮬레이터로 설정하였을 때 자동변속모드에
서 발생하는 F1→F2 상향변속 시험결과를 나타낸다.
TCU는 설계된 전류궤적을 따라 변속제어를 한 후 측정된 회전속도로부터 클러치가 결합되지 않았다고 판단되면 오류로 인식한 후 모든 비례 솔레노이드밸 브의 구동전류를 해제된 상태로 만들어 변속기를 중 립상태로 전환한 후 작동을 중지하고 클러치 작동오 류코드를 생성한다.
0 1 2 3
0 100 200 300 400 500 600
PSV Current[mA]
Time[sec]
0 500 1000 1500 2000
Turbine Speed[rpm]
IK2 IK1
Fig. 14 F1→F2 shift error 5. 독자개발 변속제어기
자동변속기는 탑재되는 차량의 요구 성능과 특성 에 적절한 방식으로 동력전달체계가 설계되므로 모 든 변속기에 적용될 수 있는 범용 변속제어기는 존 재하지 않는다. 따라서 변속제어기 개발을 위해서는 기계적인 동력전달 특성에 대한 분석을 바탕으로 설 계해야 하지만 개발 경험이 부족한 상태에서는 선진 사에서 개발되어 상용화된 TCU에 대한 분석을 통한 역 설계가 가장 효율적인 방법이다.
Fig. 15는 국책 연구과제로 수행된 휠로더와 지게 차 자동변속기 개발에서 설계된 변속제어기를 보여 준다.5) 양산용은 개발용 마이크로 컨트롤러 보드을 사용하여 회로변경이 용이하고 클러치 압력을 측정 하여 모니터링하는 부가적인 기능이 포함되어 있는 반면에 양산용은 모든 부품을 SMD로 설계하여 실제 양산에 적합하도록 개발된 사양이다. 독자개발 변속 제어기의 펌웨어는 TCU 성능분석기와 변속기 시뮬 레이터를 활용하여 ZF사 TCU의 변속제어 알고리즘 을 분석한 후 이를 바탕으로 독자모델로 설계된 변 속기에 응용하여 대부분의 변속기능을 ZF사 TCU와 유사하게 구현하였으며 진단 및 안전작동(diagnosis and failsafe) 기능도 설계하여 성능을 검증하였다.
Fig. 16은 90kW급 농기계용 트랙터에 적용되는 자
동변속기 변속제어기를 보여준다. 트랙터 자동변속기 TCU개발에서도 개발 초기에는 회로변경과 수정이 용이한 개발용을 설계하여 활용하였고 변속기능에 대한 검증이 어느 정도 완료된 이후에 양산용 PCB를 제작하였다. 트랙터 변속제어 알고리즘 설계에서도 변속기 전문업체인 ZF사 TCU를 벤치마킹하여 TCU 성능분석기를 이용해서 실차시험결과를 분석한 후 이를 기반으로 설계하였다.
(a) Development version
(b) Commercial version
Fig. 15 TCU for wheel loader/forklift
(a) Development version
(b) Commercial version Fig. 16 TCU for tractor
6. 결 론
자동변속기 TCU는 운전자의 조작과 주행상태를 인식하여 자동 변속선도로부터 변속시점을 결정하고 클러치 압력을 조절하여 변속제어를 수행하는 핵심 부품으로 변속제어 알고리즘의 설계는 동력전달체계 에 대한 이론적인 분석과 반복적인 변속시험을 통해 서 얻어진 축적된 기술을 바탕으로 이루어져야 한다.
특히, 건설기계 및 농기계용 자동변속기는 작업과 주 행특성이 승용차용 자동변속기와 다르므로 상대적으 로 높은 기술수준에 있는 승용차용 변속제어기술을 그대로 적용하기 어렵다.
최근에는 자동변속기에 대한 요구 성능수준이 높 아짐에 따라 이를 만족시키기 위해서 변속제어기 하 드웨어와 변속 알고리즘이 프로그램으로 구현하는 펌웨어 기술이 지속적으로 발전되어 왔으며 이러한 추세는 날로 엄격해지는 환경관련 규제와 차량에 도 입된 전자제어시스템이 고도화됨에 따라 더욱 가속 화될 전망이다. 일반적인 국산화 연구개발은 해외 선 진제품을 벤치마킹하여 시제품을 제작한 후 지속적 인 성능시험과 설계개선을 통해 양산개발로 이어지 는 방식이었으나 펌웨어가 도입되는 전자제어시스템 에서는 운영 프로그램 분석을 통한 역 설계가 불가 능하므로 국산화 개발에 어려움을 겪고 있는 실정 이다.
본 해설기사에서는 건설 중장비와 농업용 트랙터 에 적용되는 자동변속기의 국산화 개발연구로 수행 된 국책과제에서의 변속제어기 개발사례를 소개하였 다. 변속제어와 관련된 기존 연구와 축적된 기술이 부족한 상태에서 제한된 기간 내에 개발목표를 달성 하기 위해서는 선진제품 분석에 의한 역 설계가 가 장 효율적인 접근방법으로 판단되었으며 상용 변속 제어기에 구현된 변속제어 알고리즘을 파악할 수 있 는 방안을 모색하여 제시하였다.
TCU 성능분석기는 실차시험에서 변속제어기 입출 력 신호를 모니터링하여 변속조건에 따른 유압 솔레 노이드밸브 작동특성을 분석하는 기능이고 변속기 시뮬레이터는 실차시험 분석의 한계를 극복하기 위 하여 자동변속기가 배제된 상태에서 TCU 입력신호 를 모사하여 다양한 변속조건에 따른 TCU 작동특성 을 분석하는 기능을 갖는다. 지게차, 휠로더, 농업용
트랙터 자동변속기 국산화 개발에서는 TCU 성능분 석기와 변속기 시뮬레이터를 활용하여 선진제품을 분석하고 이를 바탕으로 변속제어기를 설계하고 성 능을 평가하였다.
10여년에 걸쳐 수행된 연구개발에도 불구하고 전 자제어방식의 자동변속기는 여전히 양산으로 이어지 고 있지 않지만 그 동안 수행된 연구결과와 개발경 험은 또 다른 개발과제의 밑거름이 되어 자동변속기 국산화를 촉진시킬 것으로 예상된다.
참고 문헌
1) Gyuhong Jung, SangHo Shin, SeungIll Lee and HyungJun Kim, "A Development of TCU Analyzer for Wheel Loader Automatic Transmission", KSAE fall conference, Vol. III, pp. 1405~1410, 2006.
2) ZF-Ergopower Transmission 4WG-260, ZF, 2001.
3) Gyuhong Jung, "Analysis of Diagnosis and Failsafe Algorithm Using Transmission Simulator", Transactions of KSAE, Vol. 22, No. 4, pp. 89~97, 2014.
4) G. H. Jung and K. D. Kim, "Diagnosis Design Using Embedded Transmission Simulator", KFPS spring conference, pp. 56~61, 2010.
5) G. H. Jung and G. H. Lee, "A Development of Forklift Shift and Constant Speed Endurance Test Controller for Dynamometer Test", Transactions of KFPS, Vol. 4, No. 3, pp. 13~21, 2007.
[저자 소개]
정규홍
E-mail : [email protected] Tel : 031-539-1974
1963년 7월 30일생.
1993년 서울대학교 기계설계학과 박사 과정 졸업. 1993년 현대자동차 중앙연구 소 선임연구원, 1995년-현재 대진대학교 컴퓨터응용기계설계공학과 교수, 자동변속기 변속제어기 설 계, 운동재현기 제어시스템설계, 서보밸브 및 비례제어밸브 컨트롤러 설계 및 개발, 메카트로닉스를 이용한 제어시스템 개발에 종사. 유공압건설기계학회, 대한기계학회, 한국자동차 공학회 회원.