논문 2016-53-10-8
효율적인 구현을 위한 안개 제거 방법의 최적화
( Optimization of Dehazing Method for Efficient Implementation )
김 민 상
*, 박 용 민
*, 김 병 오
*, 김 태 환
**( Minsang Kim, Yongmin Park, Byung-O Kim, and Tae-Hwan Kimⓒ)
요 약
본 논문에서는 안개 제거의 수행 시간을 단축하기 위한 최적화 기법들을 제안하고, 이를 기반으로 하는 효율적인 안개 제거 방법을 제시한다. 제안하는 최적화 기법으로, 다크 채널을 동일 크기의 영역으로 분할하여 분산 정렬을 적용하여 대기 강도를 추정함으로써 대기 강도 추정에 필요한 정렬의 연산을 간소화하였고, 대기 강도를 단색으로 가정하여 전달량 추정에 필요한 영상 정규화 과정을 간소화하였다. 또한, 메디안 다크 채널을 도입하여 안개 제거 품질을 유지하면서도 전달량 보정 과정을 효 과적으로 제거하였다. 제안하는 기법들을 바탕으로 효율적인 안개 제거 방법을 제시하였고, 이의 우수성을 입증하기 위해 프로 토타입 시스템을 개발하여 성능을 분석하였다. 제안하는 안개 제거 방법은 기존 방법과 비교하여 대등한 안개 제거 품질을 보 이면서도 수행 시간을 최대 65% 단축하였다.
Abstract
This paper presents optimization techniques to reduce the processing time of the dehazing method and proposes an efficient dehazing method based on them. In the proposed techniques, the atmospheric light is estimated based on the distributed sorting of the dark channel pixels, so as to reduce the computations. The normalization process required in the transmission estimation is simplified by the assumption that the atmospheric light is monochromatic. In addition, the dark channel is modified into the median dark channel in order to eliminate the transmission refinement process while achieving a comparable dehazing quality. The proposed dehazing method based on the optimization techniques is presented and its performance is investigated by developing a prototype system. When compared to the previous method, the proposed dehazing method reduces the processing time by 65% while maintaining the dehazing quality.
Keywords : 안개 제거, 다크 채널 프라이어, 영상 품질 개선, 프로토타입 시스템, 중간값 필터
*학생회원, **정회원, 한국항공대학교
(School of Electronics and Information Engineering, Korea Aerospace University)
ⓒCorresponding Author (E-mail : [email protected])
※ 본 연구는 2015년도 정부(교육과학기술부)의 재원으로 한국연구재단의 지원을 받아 수행된 기초연구사업임 (NRF-2015R1D1A1A01059041).
Received ; August 12, 2016 Revised ; September 2, 2016 Accepted ; September 26, 2016
Ⅰ. 서 론
안개는 대기 상의 수증기가 응결되어 지면 근처에 입 자 형태로 존재하는 현상이다. 안개가 낀 환경에서 물 체를 촬영할 경우, 대기 중에 존재하는 안개 입자로 인 한 산란광의 영상으로 물체로부터 반사된 빛이 카메라 로 전달되는 비율(전달량)이 감소하여 물체의 색상 정
보가 왜곡된다
[1]. 이러한 색상 정보의 왜곡은 컴퓨터 비 전 기술을 기반으로 하는 다양한 응용 시스템에서 성능 저하를 유발할 수 있다. 따라서, 주어진 영상에서 안개 로 인한 영상 왜곡을 보정하기 위한 안개 제거 기술이 필요하다.
영상 내의 안개를 제거하여 영상의 색상 왜곡을 보정 하기 위한 다양한 연구가 진행되어 왔다. 초기의 연구 들에서는 같은 장면에서 촬영한 다수의 영상을 바탕으 로 안개가 없는 영상을 복원하는 방법들이 개발되었다
[2~4]
. 하지만 이런 방법들은 형태학적으로 동일한 영상
을 시간 간격을 두고 여러 번 촬영하는 것이 어렵기 때
문에 효과적으로 구현되기 어렵다. 이러한 문제점 때문
에, 최근에는 단일 영상을 이용한 안개 제거 방법들이
연구되고 있다
[5~9]. Tan은 복원된 영상이 안개 영상에
다크 채널 연산 대기 강도 추정 영상 정규화 다크 채널 연산 전달량 추정 전달량 보정 영상 복원
I Idark
I
I A
t' I
A t ˆI ˆIdark J
그림 1. DCP기반의 기존 안개 제거 방법
Fig. 1. Overall flow of the conventional dehazing method based on DCP.
비해 대조 비가 높다는 특성을 이용한 안개 제거 방법 을 제안하였다
[5]. 최근에, He는 dark channel prior (DCP)를 이용한 단일 영상 안개 제거 방법을 제안하였 다
[7]. 이 방법은 안개가 없는 영상의 통계적인 특성을 사용하여 우수한 안개 제거 품질을 보이지만, 복잡한 연산 과정 때문에 안개 제거의 수행 시간이 길어서 실 제 응용 시스템에 적용되기 어렵다.
본 논문에서는 기존의 안개 제거 방법의 수행 시간을 단축시키기 위한 최적화 기법들을 제안하고 이를 기반 으로 하는 효율적인 안개 제거 방법을 제시한다. 제안 하는 최적화 기법들은 다음과 같다: 1) 다크 채널을 동 일 크기의 영역으로 분할하여 분산 정렬을 적용하여 대 기 강도를 추정함으로써, 대기 강도 추정에 필요한 정 렬의 연산을 간소화한다; 2) 대기 강도를 단색으로 가 정하여 전달량 추정에 필요한 영상 정규화 과정을 간소 화한다; 3) 전달량 추정 과정에서 메디안 다크 채널을 도입하여 전달량 보정 과정을 효과적으로 제거한다. 이 러한 최적화 기법들을 바탕으로, 효율적인 안개 제거 방법을 제시한다. 안개 제거의 프로토타입 시스템을 구 현하여 제안하는 방법의 성능을 기존 방법과 비교한 결 과, 제안하는 방법은 기존 방법과 대등한 안개 제거 품 질을 보이면서도 최대 65% 단축된 수행 시간을 갖는다.
본 논문의 나머지 부분은 다음과 같이 구성된다. II절 에서는 기존의 안개 제거 방법에 대해 설명하고, 기존 방법의 수행 시간을 분석하여 병목 지점을 보인다. III 절에서는 안개 제거의 품질을 유지하면서도 수행 시간 을 단축시키기 위한 최적화 기법들을 제안하고 이를 기 반으로 하는 새로운 안개 제거 방법을 보인다. IV절에 서는 안개 제거 프로토타입 시스템을 사용하여 기존 방 법과 제안하는 방법의 성능을 비교 분석한다. 마지막으 로 V절에서 본 연구의 결론을 유도한다.
Ⅱ. 기존의 안개 제거 방법
1. DCP기반의 안개 제거 방법
안개 제거 방법에 기반이 되는 안개 영상 모델
[10]은
다음과 같이 정의된다.
( ) ( ) ( ) (
1
( ))c c c
I x
=
J x t x+
A−
t x, (1) 이 식에서, Ic(x)와 Jc(x)는 RGB채널로 구성된 안개 영상 I와 안개가 제거된 영상 J에서 c∈{R, G, B}채널 의 x위치에서의 픽셀 강도를 나타낸다. Ac는 대기 강도 A의 c채널에서의 값을 나타내며 영상 내에서 일정하다.
t로 표시되는 전달량은 빛이 산란되지 않고 영상 입력 장치에 도달하는 비율로 정의되며, t(x)는 x위치에서의 t값을 나타낸다, 0 ≤ t(x) ≤ 1. 안개 제거는 주어진 안 개 영상 I에 대하여 A와 t를 추정하고, 이를 바탕으로 안개가 없는 영상 J를 복원하는 것이다.
DCP에 기반한 기존의 안개 제거 방법의 절차를 그 림 1에 도시하였다. 그림에서 보는 바와 같이, 대기 강 도 A는 원본 영상 I의 다크 채널 Idark를 이용하여 추 정한다. Idark는 다음과 같이 정의된다.
{ } ( )
( )
( ) , ,
( ) min min
x dark
y c R G B c
I x I y
∈
= ∈Ω
(2)
이 식에서, Idark(x)는 x위치에서의 I의 다크 채널 값, Ω(x)는 x를 중심으로 하는 윈도우를 뜻한다. A는 Idark에서 상위 0.1%의 강도를 갖는 모든 픽셀들에 대 응되는 I의 픽셀들 중 가장 밝은 픽셀 값으로 추정한다.
전달량 t는 주어진 영상 I를 A로 정규화한 영상 I 에 대해 다시 다크 채널을 구하여 추정한다. DCP에 따르 면 맑은 날 야외에서 촬영된 영상의 다크 채널은 다크 채널을 구하는데 사용하는 윈도우의 크기가 충분히 작 다면 0에 가까운 값을 갖는다. I 는 I를 대기 강도로 정 규화한 영상을 표시한다. 즉, Jdark(x) = 0으로 볼 수 있으므로, 이를 이용하여 다음과 같이 전달량을 구할 수 있다.
( ) ( )
(
{ , ,}( ( ) ))
' 1 min
1
min ˆ ( )
R G c
c B c
y x
dark
t x I y A
I x
ω ω
∈Ω ∈
= − ⋅
=
− ⋅, (3)
이 식에서 ω는 원근감의 보존을 위해 설정하는 임계값으
로 본 논문에서는 0.95로 정하였다
[7]. 다크 채널을 구하기 위한 연산은 기본적으로 어떤 윈도우에 따른 공간상의 연산이므로, 위의 식에 따라 추정한 전달량 t'은 원본 영 상의 윤곽선이 소실된 개략적인 전달량이며 이를 보정하 여 영상 복원을 위한 전달량 t로 사용한다.
개략적인 전달량을 보정하기 위하여 기존의 방법에 서는 soft matting 기법을 도입하였지만, 이는 라플라시 안 행렬을 사용하기 때문에 높은 연산 복잡도를 가진다
[7]
. 최근에는 유도 필터(guided filter)를 도입하여 전달 량 보정 과정을 수행한다
[11]. 하지만 유도 필터의 경우, 보정된 전달량 t를 구하기 위해서 다음과 같은 연산을 수행해야 한다.
( ) ( ) ( )
( )
(
( ) T)
( )( ) y x
t x = ∑ ∈ω a y ⋅I y +b y
ω
x, (4) 이 식에서, t(x)는 보정된 전달량, a(y)와 b(y)는 유도 필 터를 위한 선형 계수를 의미하고, ω는 국부 영역의 픽셀 들의 집합을 의미한다. 여기서 a(y)와 I(y)는 RGB채널로 구성된 컬러 벡터이기 때문에 행렬 연산을 포함하며 a(y) 와 b(y)의 식 또한 복잡한 행렬 구조를 이루고 있어, 높은 연산 복잡도를 수반한다.
이와 같은 절차를 거쳐서 추정된 A와 t를 이용해 최 종적으로 안개가 제거된 영상 J를 복원하며, 이를 식으 로 나타내면 다음과 같다.
( ) ( 0)
( ) c ( ) c max ( ),
c c
J x =A + I x −A t x t
, (5)
t0는 t(x)의 하한 값으로 0보다 작은 값에 대해 적용되며 본 논문에서는 0.1로 정하였다
[7].
전달량 추정 (12.77ms)2%
전달량 보정 52%(415.78ms)
다크 채널 연산 (195.25ms)24%
대기 강도 추정 (89.15ms)12%
영상 복원 (43.19ms)5%
영상 정규화 (37.59ms)5%
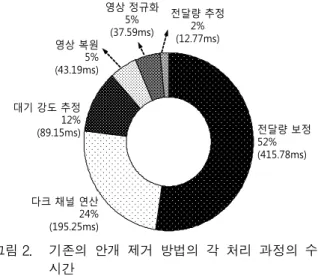
그림 2. 기존의 안개 제거 방법의 각 처리 과정의 수행 시간
Fig. 2. Execution time of each processing step in the conventional method.
2. 기존 안개 제거 방법의 수행 시간 분석
기존 안개 제거 방법은 중복된 다크 채널 연산과 복 잡한 대기 강도 추정 및 전달량 보정으로 구성되는 복 잡한 처리 과정을 갖는다. 각 처리 과정이 실제 성능에 미치는 영향을 분석하기 위하여, 기존 안개 제거 방법 을 소프트웨어로 구현하여 각 처리 과정의 수행 시간을 분석하였다. 그림 2는 320×240 크기의 샘플 영상에 기 존의 안개 제거 방법을 적용하였을 경우, 각 처리 과정 의 수행 시간 및 비율을 정리한 것이다. 기존 방법의 전 달량 보정 과정에서 수행되는 유도 필터는 (4)와 같은 복잡한 연산을 포함하며, 이는 그림 2에서 보는 바와 같이 전체 처리 과정 대비 가장 긴 수행 시간을 갖는다.
또한, 대기 강도 추정과 전달량 추정을 위해 각각 I와
I 에 대한 다크 채널을 구하는데, 이를 위해 그림 1에서 보는 바와 같이 총 두 번의 다크 채널 연산을 수행하게 되고, 이는 그림 2에서 보는 바와 같이 전체 수행 시간 중 상당 부분을 차지한다. 그리고 대기 강도 추정 과정 에서 Idark의 모든 픽셀에 대해 정렬을 수행하여 높은 픽셀 강도를 갖는 픽셀 위치를 찾아내어 해당 픽셀들의 위치에서 가장 밝은 원본 영상의 픽셀을 취하게 되는 데, 이 과정에 필요한 픽셀 정렬 과정에 따라 긴 수행 시간을 갖게 되었음을 짐작할 수 있다.
Ⅲ. 제안하는 최적화 기법 및 안개 제거 방법
앞 절에서 분석한 바와 같이, 기존 안개 제거 방법의 처리 과정 중 수행 시간이 긴 부분은 다크 채널 연산, 대기 강도 추정 및 전달량 보정이며, 이들 과정의 수행 시간을 효과적으로 줄이면서도 안개 제거 품질을 유지 하기 위한 효율적인 방법이 필요하다. 본 절에서는 이 러한 최적화 방법들을 제안하고, 이를 기반으로 하는 새로운 안개 제거 방법을 제시한다.
1. 대기 강도 추정에 필요한 정렬 연산의 간소화
대기 강도 추정을 위해 기존의 방법에서는 다크 채널
의 모든 픽셀에 대해 정렬 과정을 수행해야 한다. 이는
영상의 크기가 커질수록, 정렬 대상 픽셀 수가 증가함
으로써 매우 높은 연산 복잡도를 갖는다. 제안하는 방
법에서는 분산 정렬에 기반하여, 다크 채널을 동일한
크기를 갖는 n개의 영역으로 분할하고, 분할된 각 영역
내에서 최대값을 갖는 픽셀 위치를 찾아내어, 찾아낸 n
개의 위치에 해당하는 원본 영상의 픽셀들 중 가장 밝
12 48 300 768 1200 3072 4800 19200 76800 n
0 0.2 0.4 0.6 0.8 1
MSE
Ar Ag Ab
(a)
12 48 300 768 1200 3072 4800 19200 76800 n
0 0.2 0.4 0.6 0.8 1
MSE
Ar Ag Ab
(b)
그림 4. 제안하는 대기 강도 추정 방법의 정확도 (a) 320×240 크기의 영상 (b) 640×480 크기의 영상 Fig. 4. Accuracy of the proposed method for estimating
the atmospheric light at (a) 320×240, and (b) 640×480 image.
상위 0.1% 강도 픽셀 영역 추출
정렬 대기 강도
A
Idark 원본 영상의
가장 밝은 픽셀
(a)
분할된 영역 내의 최대값 픽셀 위치 분산
정렬 대기 강도
A
Idark를 9개
영역으로 분할 원본 영상의
가장 밝은 픽셀
(b)
그림 3. 대기 강도 추정 방법 (a) 기존의 대기 강도 추 정 방법 (b) 제안하는 대기 강도 추정 방법 Fig. 3. Atmospheric light estimation in (a) the conventional
method and (b) the proposed method.
은 픽셀 값을 대기 강도로 취한다.
그림 3은 기존의 대기 강도 추정 방법과 제안하는 방 법을 비교한 것이다. 제안하는 방법에서는 분할된 각 영역 내에서 최대값을 갖는 픽셀의 위치를 찾아내야 하 는데, 이는 전체 영상의 픽셀을 정렬하여 일부의 상위 픽셀들에 대한 위치를 찾아내는 정렬 기반의 기존의 방 법과 비교하여 매우 낮은 연산 복잡도를 갖는다. 또한, 다크 채널에서 가장 안개가 짙은 위치를 추정하고, 이 를 바탕으로 대기 강도를 추정함에 따라, 원본 영상의 흰색 물체를 나타내는 픽셀의 값을 대기 강도로 추정하 는 오류를 범할 가능성이 낮으며, 이는 기존의 방법과 대등한 장점이다.
제안하는 방법에서 다크 채널의 분할 수 n은 추정된 대기 강도 값 및 연산 복잡도에 큰 영향을 미친다. 구체 적으로, n = 1인 경우 가장 낮은 연산 복잡도를 갖지만, 부정확한 대기 강도 추정이 이루어지게 되며, n이 커질 수록 연산 복잡도가 커지지만, 정확한 대기 강도 추정 이 이루어진다. 그림 4는 기존의 방법을 이용해 추정한 대기 강도 값과 제안하는 방법을 이용해 추정한 대기 강도 값의 차이에 대한 평균제곱오차 (mean-squared error; MSE)를 n에 따라 도시한 것이다. 그림에서 보는 바와 같이, 최적의 n값은 영상의 크기에 따라 다르게 설정되어야 하며, n = 300인 경우 320×240 크기의 영상 에 대해서 각 채널 별 대기 강도 추정 오차가 MSE = 0.15 정도로 매우 작으며, 전술한 바와 같이 대기 강도 추정에 필요한 연산이 크게 간소화되어 수행 시간을 크 게 감소시킬 수 있다.
2. 전달량 추정에 필요한 영상 정규화 과정의 간소화 영상 내의 대기 강도 A는 특정 색상을 갖고 있지 않 다고 가정할 수 있으며, 이를 이용하여 전달량 추정에 필요한 영상 정규화 과정을 간소화하고 중복적으로 수 행했던 다크 채널 연산을 한번만 수행할 수 있도록 한다.
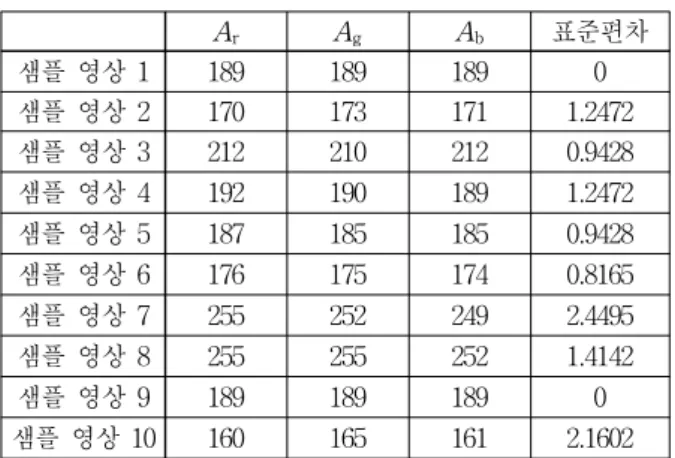
표 1은 여러 샘플 영상들에 대해서 앞 절에서 설명한 방법에 따라 추정한 A의 각 채널 값과 이들 간의 표준 편차를 나타낸다. 10개의 샘플 영상에 대해 대기 강도 의 채널 간 표준편차의 최대값은 2.45 정도로 매우 작 다. 이를 근거로, A의 각 채널 값이 동일하다고 가정하 여도 전체적인 안개 제거 품질에는 큰 영향을 미치지 않을 것이라고 예상할 수 있다.
이에 따라 제안하는 방법에서는 A를 단색으로 보고
(Ar = Ab = Ag = A) 전달량을 추정한다. 이 경우, (3)에
서 채널 별 대기 강도를 이용한 원본 영상 정규화 과정
표 1. 샘플 영상에 대한 대기 강도 추정 결과 Table1. Estimation results of the atmospheric light for
sample images.
Ar Ag Ab 표준편차
샘플 영상 1 189 189 189 0
샘플 영상 2 170 173 171 1.2472 샘플 영상 3 212 210 212 0.9428 샘플 영상 4 192 190 189 1.2472 샘플 영상 5 187 185 185 0.9428 샘플 영상 6 176 175 174 0.8165 샘플 영상 7 255 252 249 2.4495 샘플 영상 8 255 255 252 1.4142
샘플 영상 9 189 189 189 0
샘플 영상 10 160 165 161 2.1602
242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 89 242 63 63 242 242 242 89 89 242 63 63 89 89 89 89 242 242 242 242 242 89 89 89 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242
242 242 242 242 242 242 242 242 242 242 242 242 242 242 89 89 63 63 63 63 242 89 89 89 63 63 63 63 89 89 89 89 63 63 63 63 89 89 89 89 63 63 63 63 89 89 89 89 242 242 242 89 89 89 89 89 242 242 242 242 242 242 242 242
242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 89 242 242 89 242 242 242 89 89 242 242 89 89 89 89 89 242 242 242 242 242 89 89 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242 242
Idark
Imed 최소값필터링
중간값필터링
{ , ,}
min c
c R G BI
∈
그림 5. 다크 채널과 메디안 다크 채널의 비교
Fig. 5. Comparison between the dark channel and the median dark channel.
다크 채널 연산 제안하는
대기 강도 추정 메디안
다크 채널 연산 영상 정규화 전달량 추정 영상 복원
I Idark
I
I A
t I
A t ˆI J
Imed A
Imed
그림 6. 제안하는 안개 제거 방법
Fig. 6. Overall flow of the proposed dehazing method.
을 다크 채널에 대해 수행하는 것으로 변경할 수 있다.
정규화된 다크 채널을 이용해서 다음과 같이 전달량을 추정한다.
( )
' 1 (
dark( ) )
t x
= − ⋅
ω I x A, (6)
원본 영상 정규화 과정은 영상의 모든 픽셀들에 대하 여 픽셀 값을 대기 강도의 값으로 나누는 것으로, 높은 연산 복잡도를 갖는다. 제안하는 방법에서는 이러한 정 규화 과정을 컬러 채널에서 각 채널 별로 수행하지 않 고, 단일 채널로 이루어진 다크 채널에 대해 수행함으 로써 연산 복잡도를 크게 줄이게 된다.
3. 전달량 보정 과정의 제거
전달량은 다크 채널을 기반으로 계산되고, 다크 채널 연산은 앞 절에서 정의된 바와 같이 윈도우 기반의 최 소값 필터를 포함하고 있기 때문에 영상 내의 윤곽선 정보가 소실된다. 이를 복원하기 위해서 기존 방법에서 는 전달량 보정 과정에서 복잡한 연산을 수행한다. 제 안하는 방법에서는 윤곽선 소실을 야기하는 최소값 필 터를 중간값 필터로 대체하는 형태로 다크 채널 연산을 변경함으로써 부가적인 전달량 보정 과정을 효과적으로 제거한다
[12]. 이를 통해 안개 제거의 전체적인 연산량을 크게 감소시킬 수 있다.
제안하는 방법에서 사용하는 다크 채널은 최소값 필 터를 중간값 필터로 대체한 메디안 다크 채널이며, 다 음과 같은 연산으로 표현된다.
{ }
(
, ,)
( ) med( ) min ( )
med
c R G B c
y x
I x I y
∈
= ∈Ω
(7)
그림 5에서는 어떤 원본 영상 I와 그에 대한 I
dark및
I
med를 비교하고 있다. 그림에서 보는 바와 같이 I
dark는
윈도우 기반에서 대표 값으로 최소값을 선택하기 때문
에 원본 영상의 윤곽선 정보가 대폭 소실되는 것을 관
찰할 수 있다. 이에 따라, I
dark를 이용해 추정한 전달량
은 개략적인 전달량이 되고, 개략적인 전달량은 앞 절
에서 설명한 바와 같이 유도 필터와 같은 복잡한 과정
을 통해 보정되어야 한다. 하지만 I
med는 그림 5에서 보
는 바와 같이 원본 영상의 윤곽선 정보의 소실이 거의
없다. 이런 사실을 이용하여, 제안하는 방법에서는 (3)
에서 I
dark를 I
med로 교체하여 전달량을 추정한다. I
med는
원본 영상의 윤곽선 정보가 거의 소실되지 않았으므로,
이를 바탕으로 추정한 전달량을 보정하는 복잡한 절차
를 제거할 수 있게 된다. 이어지는 절에서 보이겠지만,
(a) (b) (c) 그림 7. 안개 제거 품질 비교 (a) 안개 영상 (b) 기존 방법의 복원 영상 (c) 제안하는 방법의 복원 영상
Fig. 7. Comparison of dehazing quality (a) original hazy image (b) dehazed result by the conventional method, and (c) dehazed result by the proposed method.
메디안 다크 채널을 사용하는 제안하는 방법은 기존 방 법과 비교하여 대등한 안개 제거 품질을 보이면서도, 전달량 보정 과정의 제거로 인하여 감소된 수행 시간을 갖는다.
4. 제안하는 최적화 기법들을 기반으로 하는 안개 제거 방법
앞 절에서 제안된 최적화 기법들을 기반으로 새로운 안개 제거 방법을 제시한다. 그림 6은 제안하는 안개 제거 방법의 흐름도를 나타낸다. 먼저, 주어진 영상 I에 대하여 I
dark를 구하고, 이를 이용하여 제안한 방식에 따 라 대기 강도 A를 추정한다. 다음, I에 대하여 메디안 다크 채널 I
med를 구하고 A로 정규화한다. 추정된 대기 강도와 I med를 바탕으로 전달량 t를 추정하고, 추정된 A와 t를 이용해서 안개를 제거한 영상 J를 복원한다.
기존의 방법과 비교하여 제안하는 방법은 대기 강도 추정 과정에서 전체 픽셀들에 대한 정렬의 연산을 간소
화하여 대기 강도 추정 과정에서 소요되는 연산을 크게 감소시켰다. 또한, 대기 강도를 단일 색상으로 가정하여 전달량 추정 과정의 영상 정규화 과정을 감소시켰다.
추가적으로, 전달량 추정에서 다크 채널 대신 메디안 다크 채널을 도입함으로써, 추정된 전달량을 보정하는 절차를 효과적으로 제거하였다. 이러한 기법들을 적용 함으로써, 기존 방법과 비교하여 매우 낮은 연산 복잡 도를 가지며, 이를 통해 전체 수행 시간을 현저히 감소 시킬 수 있을 것이다.
Ⅳ. 실험 결과
본 논문에서는 대표적으로 사용되는 안개 영상에 대
하여 안개 제거를 수행하여 기존의 방법과 제안하는 방
법의 주관적 품질 비교를 통해 제안하는 방법의 타당성
을 입증한다. 안개 제거 품질의 비교를 위해 그림 7에
서 안개 영상에 대한 기존 방법과 제안하는 방법의 안
그림 8. 안개 제거 프로토타입 시스템 Fig. 8. Prototype dehazing system.
0 500 1000 1500 2000 2500 3000 3500
기존 방법
대기 강도 추정 다크 채널 연산
수행 시간 (단위 : 밀리초)
320×240 640×480
전달량 보정
793.61
제안된 방법 320×240 640×480
메디안 다크 채널 연산 나머지
415.75 96.48 89.14 195.24
1670.38
372.85 394.26 776.49
125.02 51.81 32.37 76.01
492.42 206.52 120.31 302.72 3213.98
285.21
1121.97
그림 9. 안개 제거 수행 시간 분석
Fig. 9. Breakdown of the execution time for dehazing.
개 제거 영상을 나타내었다. (b)와 (c)의 표시된 부분을 비교해보면, 중간값 필터를 도입한 제안하는 방법의 (c) 가 전달량 보정 과정을 수행한 기존 방법의 (b)에 비해 안개가 더 많이 제거됨에 따라 물체의 색이 더 드러나 게 되어 색포화가 나타나지만, 윤곽선 부근의 안개를 더 효과적으로 제거한다는 것을 알 수 있다. 이러한 결 과로부터 최적화 기법들을 기반으로 한 제안하는 안개 제거 방법이 기존의 안개 제거 방법과 비교하여 대등한 안개 제거 품질을 보인다는 것을 알 수 있다.
안개 제거 수행 시간의 비교를 위해, 기존의 방법과 제안하는 방법을 기반으로 안개 제거 프로토타입 시스 템을 구현하여 그 성능을 비교하였다. 그림 8은 제안하 는 방법을 기반으로 하는 안개 제거 프로토타입 시스템 을 나타낸다. 프로토타입 시스템은 800MHz dual-core ARM Cortex-A9 processor기반의 임베디드 개발 보드 와 영상 출력을 위한 VGA모니터로 구성된다. 정당한 비교를 위하여 기존의 방법과 제안하는 방법을 모두 소 프트웨어로 구현하여 동일한 프로토타입 시스템에서 작 동시키면서 수행 시간을 분석하였다.
그림 9는 320×240과 640×480 크기의 샘플 영상에 대 한 기존의 방법과 제안하는 방법의 안개 제거 수행 시 간을 나타낸다. 제안하는 최적화 기법들로 인하여, 대기 강도 추정 과정의 픽셀 정렬의 연산이 간소화되어 대기 강도 추정 과정의 수행 시간이 320×240과 640×480 크 기에서 각각 64%, 69% 단축되었다. 대기 강도를 단색 으로 가정하여 전달량 추정에 필요한 영상 정규화 과정
이 제거되었고, 중복적으로 수행했던 다크 채널 연산이 한번으로 줄어 다크 채널 연산의 수행 시간은 320×240 과 640×480 크기에서 61% 단축되었다. 또한 제안하는 방법에서는 메디안 다크 채널을 도입하여 전달량 보정 과정이 효과적으로 제거됨으로써 결과적으로 전체 안개 제거 수행 시간은 기존 방법에 대해 320×240과 640×480 크기에서 각각 64%, 65% 단축되었다.
Ⅴ. 결 론
본 논문은 효율적인 안개 제거를 위해 DCP기반의 안개 제거 방법의 수행 시간을 단축시키기 위해 기존의 방법을 최적화하는 기법을 제안하였다. 제안하는 최적 화 기법들로부터 대기 강도 추정 과정의 정렬의 연산을 간소화하였고, 전달량 추정에 필요한 영상 정규화 과정 을 간소화하였으며, 전달량 보정 과정을 제거하였다. 또 한 최적화 기법들을 기반으로 하는 효율적인 안개 제거 방법을 제시하였다. 제안하는 방법의 타당성을 검증하 기 위해 제안하는 방법을 기반으로 하는 안개 제거 프 로토타입 시스템을 개발하였다. 제안하는 방법은 기존 방법과 비교하여 대등한 안개 제거 품질을 보이면서도 수행 시간을 최대 65% 단축하였다.
REFERENCES