논문 2014-51-4-12
원형에너지가 추가된 p-Snake를 이용한 윤곽선 추출 기법
( Contour Extraction Method using p-Snake with Prototype Energy )
오 승 택*, 전 병 환***
( Seung-Taek Oh and Byung-Hwan Jun
ⓒ)
요 약
임의의 물체 영상에서 정확한 윤곽선을 찾아내는 것은 영상 처리 관련 시스템을 구축하는데 있어 필수적인 요소이다. 특히, 자동화된 생산 공정에서 생산품의 검사를 위한 비전시스템을 구축하다면 직선, 원 등의 정형화된 모형에 대한 윤곽선의 검출 이 매우 중요하다. 본 논문에서는 원형(prototype) 에너지를 추가하여 개선된 윤곽선 추출 알고리즘으로 원형적응 동적윤곽선 모델, p-Snake를 제안한다. 제안 방법은 원형분석을 위하여 물체 영상에 소벨 연산을 수행한 후, 기존 스네이크 알고리즘을 적 용하여 초기 윤곽선을 찾는다. 이후 초기 윤곽선 정보에 근거하여 직선, 원 등의 원형(prototype)을 분석하고, 원형 에너지를 정의하여 기존의 스네이크 함수에 추가적인 에너지 항목으로 사용함으로써 물체의 최종 윤곽선을 검출하였다. 산업현장의 배 경을 가정한 환경에서 취득된 340장의 영상에 대하여 실험한 결과, 잡음이나 조명 등의 이유로 물체와 배경의 구분이 선명하 지 않거나 영상에서 에지가 충분히 존재하지 않는 경우에도 윤곽선을 추출할 수 있음을 확인할 수 있었다. 또한 원형 (prototype)과 얼마나 일치하는 가를 나타내는 척도인 유사도의 경우, 제안한 p-ACM으로 추출한 윤곽선의 원형 유사도가 ACM의 처리 결과에 비해 9.85%가량 우수한 것으로 나타났다.
Abstract
It is an essential element for the establishment of image processing related systems to find the exact contour from the image of an arbitrary object. In particular, if a vision system is established to inspect the products in the automated production process, it is very important to detect the contours for standardized shapes such lines and curves. In this paper, we propose a prototype adaptive dynamic contour model, p-Snake with improved contour extraction algorithms by adding the prototype energy. The proposed method is to find the initial contour by applying the existing Snake algorithm after Sobel operation is performed for prototype analysis. Next, the final contour of the object is detected by analyzing prototypes such as lines and circles, defining prototype energy and using it as an additional energy item in the existing Snake function on the basis of information on initial contour. We performed experiments on 340 images obtained by using an environment that duplicated the background of an industrial site. It was found that even if objects are not clearly distinguished from the background due to noise and lighting or the edges being insufficiently visible in the images, the contour can be extracted. In addition, in the case of similarity which is the measure representing how much it matches the prototype, the prototype similarity of contour extracted from the proposed p-ACM is superior to that of ACM by 9.85%.
Keywords: Prototype Energy, p-Snake, p-ACM, Active Contour Model, Contour Extraction
* 정회원, 공주대학교 대학원 컴퓨터공학과
(Dept. of Computer Engineering, Graduate School, Kongju National University)
** 평생회원, 공주대학교 컴퓨터공학부
(Division of Computer Science and Engineering, Kongju National University)
ⓒ Corresponding Author(E-mail: [email protected]) 접수일자: 2013년11월22일, 수정일자: 2014년3월5일 수정완료: 2014년4월3일
Ⅰ. 서 론
최근에는 자동화된 생산 공정을 갖춘 산업 현장에서 가공품의 실시간 검사를 위한 목적으로 비전시스템을 활용하는 사례가 급증하면서 가공품들의 주요 특징 요 소인 직선, 원 등을 정확히 검출해내고 이를 시스템에
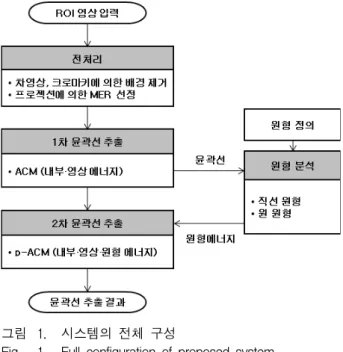
활용하고자 하는 연구들이 활발히 진행되고 있다. 산업 현장의 경우에는 현장 조명 등과 같은 주변의 환경적 요인으로 비전시스템에서 요구하는 양질의 영상을 취득 하기가 어려운 경우가 많으며, 상대적으로 작은 가공품 의 경우에는 영상을 취득했다 하더라도 영상 처리를 위 한 정보로 활용하기가 어렵다. 강건한 비전시스템의 구 현을 위해서는 무엇보다도 물체의 윤곽선을 정확하게 추출해내는 것이 중요하다. 또한 대부분의 물체들이 직 선, 원 등의 특정한 형태의 요소를 가지고 있고 이 요소 들은 물체를 식별하거나 물체에 대한 정보를 구하고자 할 때 중요한 정보로 활용될 수 있다. 본 논문에서는 실 제 산업 현장을 가정하여, 지름이 1Cm 이하인 튜브 부 품을 대상으로 주변 환경의 영향에 의해 에지 정보가 명확하지 않은 입력영상을 취득하고, 물체가 가지고 있 는 형태 정보인 직선, 원의 윤곽선 정보를 추출하는 윤 곽선 추출 알고리즘으로 원형적응 동적윤곽선 모델 (p-Snake, p-ACM)을 제안한다. 먼저, 물체 영상에서 배경을 제거한 후 관심 영역을 선정하고 ACM(Active Contour Model, Snake)이라고 불리는 에너지 최소화 알고리즘을 이용하여 최초의 윤곽선 정보를 얻어내고, 이를 토대로 직선, 원 원형(prototype)을 분석하여 추출 한다. 추출된 프로토타입을 원형에너지로 정의하여 기 존의 ACM이 사용하는 내부, 영상에너지 외에 새로운 에너지 항목으로 이용하는 방법으로 시스템의 전체 흐 름은 그림 1과 같다.
그림 1. 시스템의 전체 구성
Fig. 1. Full configuration of proposed system.
Ⅱ. 윤곽선 추출
물체의 윤곽선을 정확히 추출하는 것은 물체의 인식 및 영상 분할, 패턴인식 등 영상처리 관련 분야에서 기 본적이면서도 매우 필수적인 요소이며, 특히 대부분의 오브젝트들은 직선이나 원이 주요 구성 요소로써 표현 되는 특징이 있어 보다 정확한 윤곽선의 추출이 요구된 다. 직선, 원등의 구성요소를 찾기 위한 방법으로 가장 대표적인 것은 허프 변환(Hough Transform)[1]이다.
허프 변환은 에지 영상을 입력하면 이를 파라미터 공간 으로 변환시키고 누적된 파라미터 값으로부터 직선이나 원을 검출하는 방법으로 모든 직선, 원 요소를 검출할 수 있다는 장점이 있는 반면 많은 계산량과 메모리가 필요하다는 단점이 있다. 허프 변환 외에도 주성분 분 석을 통하여 영상내의 라인 요소를 찾거나 기하학적인 정보를 이용하여 원 요소를 추출하는 등의 영상 내 특 정 라인, 원 등의 제한적인 요소를 검출하는 방법들이
있으나[2~3] 배경과 물체의 구분이 모호한 환경에서는
적용하기가 어렵다.
윤곽선을 찾는 경우 가장 널리 쓰이는 방법으로 Kass[4]가 제안한 ACM(Active Contour Model)으로 불 리는 스네이크 알고리즘이 있는데 이는 물체의 윤곽선 을 구하기 위해 윤곽을 이루는 각 점들의 거리와 곡률 등을 고려하는 에너지 최소화 알고리즘으로 이후 Williams[5]는 안정성과 유연성을 향상시켰으며 Greedy 알고리즘을 개발하여 처리 속도를 개선하였다. 스네이 크 알고리즘은 초기 조건에 민감하고, 오목한 윤곽선 부분에서의 추출이 어렵다는 단점을 극복하기 위하여 에지의 기울기 벡터의 분포를 이용하는 GVF(Gradient Vector Flow) Snake 방법이 제안되었으며[6~7], Cohen[8]
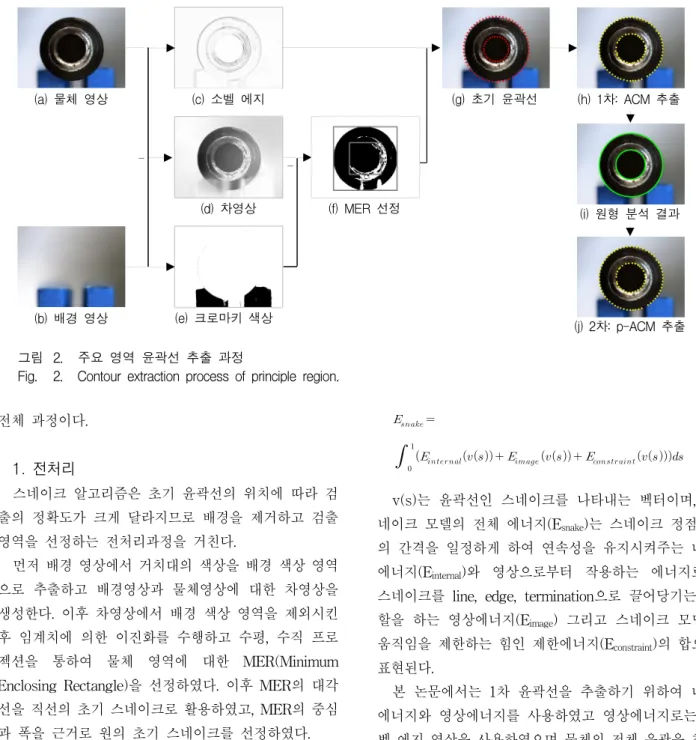
은 물체의 내측 윤곽선을 효율적으로 찾는 방법으로 스 네이크를 외부로 확장시켜 풍선처럼 부풀어 오르게 하 는 방법을 제안하였다. 또한, 복잡한 배경이나 불명확한 영상을 처리해야하는 실용분야에서도 기존 스네이크에 퍼지이론을 적용하거나[9] 복잡한 배경에서 얼굴을 추출 하는 경우에도 차영상 등의 부수적인 영상정보들을 함 께 이용하여 윤곽선 추출을 시도하는 등의 다양한 방법 으로 스네이크를 활용하고 있다[10]. 본 논문에서는 확대 촬영이 필요한 작은 튜브 부품에 대하여 계측을 위한 정보로 필수적인 특정 영역에 대한 윤곽선 검출을 시도 하였으며 그림 2는 제안하는 윤곽선 검출 알고리즘의
(e) 크로마키 색상 (d) 차영상 (a) 물체 영상
(b) 배경 영상
(c) 소벨 에지
(f) MER 선정
(g) 초기 윤곽선 (h) 1차: ACM 추출
(j) 2차: p-ACM 추출 (i) 원형 분석 결과
- -
그림 2. 주요 영역 윤곽선 추출 과정
Fig. 2. Contour extraction process of principle region.
전체 과정이다.
1. 전처리
스네이크 알고리즘은 초기 윤곽선의 위치에 따라 검 출의 정확도가 크게 달라지므로 배경을 제거하고 검출 영역을 선정하는 전처리과정을 거친다.
먼저 배경 영상에서 거치대의 색상을 배경 색상 영역 으로 추출하고 배경영상과 물체영상에 대한 차영상을 생성한다. 이후 차영상에서 배경 색상 영역을 제외시킨 후 임계치에 의한 이진화를 수행하고 수평, 수직 프로 젝션을 통하여 물체 영역에 대한 MER(Minimum Enclosing Rectangle)을 선정하였다. 이후 MER의 대각 선을 직선의 초기 스네이크로 활용하였고, MER의 중심 과 폭을 근거로 원의 초기 스네이크를 선정하였다.
2. ACM을 이용한 1차 윤곽선 추출
Active Contour Model(Snake)은 영상 평면(x, y) 상 에 초기 snake 윤곽선을 설정한 후 에너지 함수를 최소 화 하는 과정을 반복적으로 수행하여 최적의 snake 윤 곽선을 찾는 방법으로 식 (1)과 같으며, Kass[4]가 제안 한 방법에 근거하여 구현하였다.
(1)
v(s)는 윤곽선인 스네이크를 나타내는 벡터이며, 스 네이크 모델의 전체 에너지(Esnake)는 스네이크 정점 간 의 간격을 일정하게 하여 연속성을 유지시켜주는 내부 에너지(Einternal)와 영상으로부터 작용하는 에너지로서 스네이크를 line, edge, termination으로 끌어당기는 역 할을 하는 영상에너지(Eimage) 그리고 스네이크 모델의 움직임을 제한하는 힘인 제한에너지(Econstraint)의 합으로 표현된다.본 논문에서는 1차 윤곽선을 추출하기 위하여 내부 에너지와 영상에너지를 사용하였고 영상에너지로는 소 벨 에지 영상을 사용하였으며 물체의 전체 윤곽을 찾는 대신 계측정보로 활용될 특정영역에 대한 원, 직선 형 태의 스네이크를 찾을 수 있도록 구현하였다.
3. 원형 분석(Prototype Analysis)
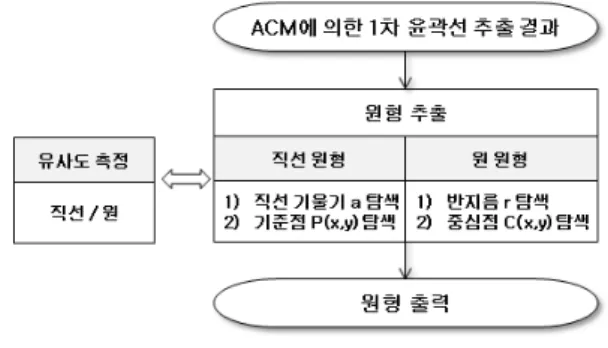
원형 분석은 물체 영상에서 주요 대상 영역에 내재된 직선, 원 등의 원형(prototype)을 찾아내는 방법으로, 1 차 윤곽선 추출 과정을 통해 얻어진 윤곽선 정보를 이 용하여 직선, 원 원형을 추출하는 과정이며 그림 3은 직선, 원 원형(prototype) 분석 과정의 흐름도이다.
그림 3. 직선, 원-원형(prototype) 분석의 흐름 Fig. 3. Flow chart of line, circle-prototype analysis.
가. 직선 원형(prototype) 추출
튜브의 측면에 대하여 네 개의 주요구간을 지정하고 각 구간에서 추출된 1차 ACM 결과 윤곽선을 분석하여 기준점 점 P(x, y)와 기울기 a로 표현되는 직선 원형 pL을 식 (2)와 같이 정의한다.
먼저 직선 원형의 기울기 a를 탐색하기 위하여, 추출 된 1차 윤곽선에서 일정 거리 간격의 스네이크 정점 쌍 들을 선정하여 각각의 y축 변위들을 구하고 중간값을 선정하여 기울기로 확정하였다. 이후에는 각 스네이크 점(Si)들을 한 점으로 하고 기울기를 적용한 각각의 후 보 직선들을 구하여 1차 윤곽선과 y축으로의 수직거리 가 최소인 직선을 직선 원형으로 선정하였다.
- 직선 원형 :
(2)
a1
a2
a3
...
a
i나. 원 원형(prototype) 추출
튜브의 정면에 대하여 추출된 1차 ACM 결과 윤곽선 을 분석하여 중심점 C(x, y)와 반지름 r로 표현되는 직 선 원형 pC를 식 (3)과 같이 정의한다.
원 원형의 중심점을 구하기 위하여 MER의 중심으로 부터 초기 반지름의 1/10 크기만큼 상, 하, 좌, 우로 확 장하여 탐색영역으로 선정하고, 영역 내 모든 점들에
대하여 1차 윤곽선의 각 스네이크 점들과의 거리를 구 하였다. 이후 거리에 대한 표준편차 값이 최소가 되는 한 점을 원 원형의 중심으로 선정하였다. 또한 반지름 은 MER의 중심으로부터 각 스네이크 점과의 거리를 계산하고, 계산된 거리 값들에 대해 중간값 알고리즘을 적용하여 채택된 값을 반지름으로 확정하였다.
- 원 원형 :
(3)
a
1a
i...
a
3a
2
직선 원형에서의 기울기와, 원 원형에서의 반지름을 선정하는 과정에 있어 보다 일반적인 방법은 평균값을 이용하는 것이지만 취득 영상에 있을 수 있는 왜곡된 일부 픽셀의 영향을 덜 받을 수 있도록 중간값 알고리 즘을 이용하였다. 그림 4는 직선, 원 원형의 추출 결과 이다.
(a) 직선 원형
(b) 원 원형 그림 4. 직선과 원의 원형 분석 결과
Fig. 4. Analysis results of line and circle prototypes.
다. 유사도 측정
제안 방법은 산업현장의 다양한 환경에서 직선과 원 형태의 오브젝트의 윤곽선을 추출한다. 추출된 윤곽선
의 정확성을 표현하고 나아가 오브젝트의 형태적 특징 을 파악하기 위하여 직선, 원 모형과 얼마나 일치하는 지를 식(4), 식 (5)의 유사도로 측정하였다.
직선 원형 유사도의 경우는 초기 스네이크로 활용된 MER의 대각선을 기준축으로 설정하고, 각 스네이크 점 들에 대해 수직인 기준축 상의 점(Pi)와의 수직 거리
합을 기준축의 길이 로 나누어 정규화 하였고, 원원형 유사도는 MER의 중심 에서 각 스네이크 점 들 간의 거리 합을 반지름 r로 정규화하여 1에 가까울 수록 직선, 원 모형에 일치하는 것으로 표현하였다.
- 직선 유사도 :
′
(4)
- 원 유사도 :
′
(5)
4. p-ACM을 이용한 2차 윤곽선 추출
최종적인 윤곽선의 검출을 위하여 에너지 최소화 알 고리즘인 ACM(Active Contour Model)에 원형에너지 항목을 추가하여 배경과 물체의 구분이 명확하지 않은 환경에서도 효율적인 윤곽선 추출을 수행하는 원형적응 동적윤곽선 모델(Prototype Adaptive Active Contour Model; p-Snake, p-ACM)을 제안한다. p-Snake 알고 리즘은 식 (6)과 같으며, 각 에너지 항목의 계수의 합은 1이 되도록 하였다.
(6)
∇
′ ′
,
에지 강도 퍼지 함수
원형에너지(Prototype Energy)는 원형분석을 통해 추출된 직선 원형, 원 원형에 퍼지함수를 적용한 것이 다. 비록 물체가 명확하게 표현되지는 않지만 일정한
프로토타입의 형태가 예상되는 영상인 경우, 원형 분석 을 통하여 대략적인 프로토타입을 예상하고 프로토타입 과 가까운 쪽에 높은 가중치를 부여하는 형태로 퍼지 함수를 적용하여 이를 추가적인 에너지 항목으로 사용 하였다. 물체 윤곽선의 에지 정보가 상대적으로 약한 경우는 원형에너지의 계수 를 높여 사용하고 그렇지 않은 경우에는 줄이는 방법으로 적응적으로 사용될 수 있도록 하였다.
기존의 ACM에 원형에너지 항목을 추가함으로써 주 요 배경 요소인 거치대와 명확히 구분되지 않는 튜브의 측면과 정면 하단 영역과 조명, 그림자 등의 요인 때문 에 명확하게 구분되지 않는 튜브의 내측 원 등의 영역 에서 계측을 위한 정보로 활용될 수 있는 타당한 윤곽 선 검출을 시도하였다.
Ⅲ. 실험 및 분석
실험을 위해 실제 산업 현장을 고려하여 푸른색 거치 대가 있는 배경 영상과 오브젝트가 올려진 물체 영상을 640×480 사이즈로 취득하였으며 이를 위하여 GigE Camera(IMC-7011G) 모델을 사용하였고 직경이 1㎝ 이 내인 원통형 튜브 물체를 15㎝ 떨어진 거리에서 확대 촬영하였다. 제안하는 시스템은 코어2듀오 P6200 2.13GHz, Windows 7 환경에서 Visual C++와 OpenCV 라이브러리를 이용하여 구현하였다.
1. 윤곽선 추출 결과
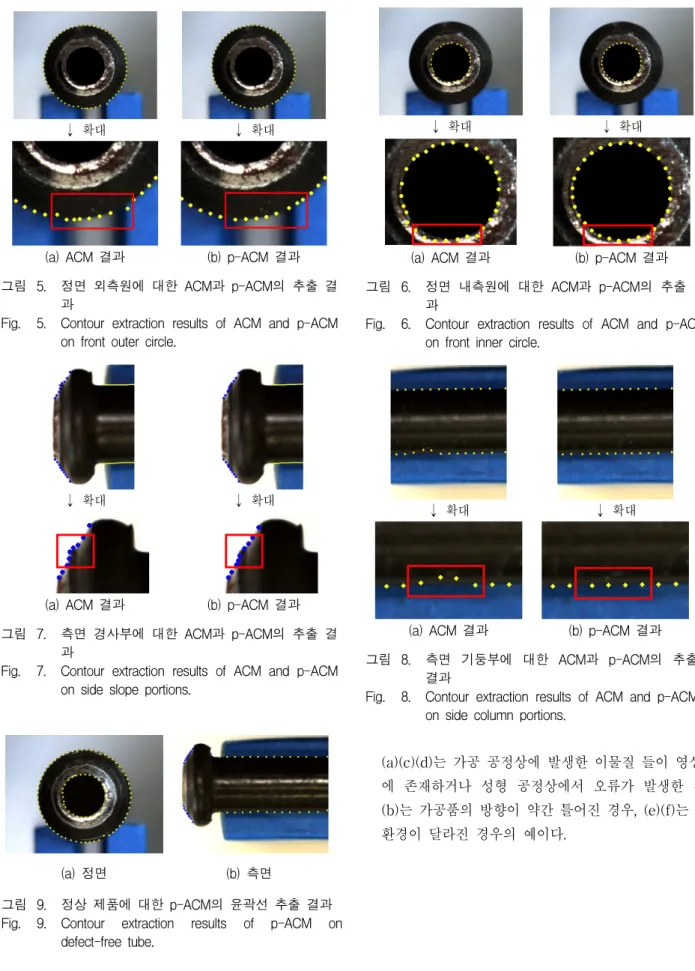
그림 5, 6은 기존의 ACM과 제안하는 p-ACM을 이 용한 튜브 정면에서의 추출 결과이다. 현장의 조명이나 주변 환경에 의하여 배경과 물체의 구분이 모호하고 상 대적으로 에지 정보가 약해진 외측 원형 하단부와 내측 원형 부분에서는 제안하는 p-ACM이 더 우수한 추출 결과를 보이고 있음을 확대된 영상에서 확인할 수 있 다. 또한 그림 7, 8은 물체의 기둥부와 경사부에 대한 실험 결과이다. 기둥부의 경우 물체와 거치대의 구분이 모호하고, 경사부에서는 일부 돌출된 직선의 형태가 있 음에도 p-ACM의 추출 결과가 더 계측에 용이한 직선 형태의 윤곽선을 강건하게 찾을 수 있음을 보였다.
그림 9는 정상적으로 가공된 튜브 부품에 대하여 p-ACM을 적용한 결과이고, 그림 10은 다양한 튜브 부 품 및 환경 조건에서의 적용 결과이다. 그림 10의
↓ 확대 ↓ 확대
(a) ACM 결과 (b) p-ACM 결과 그림 5. 정면 외측원에 대한 ACM과 p-ACM의 추출 결
과
Fig. 5. Contour extraction results of ACM and p-ACM on front outer circle.
↓ 확대 ↓ 확대
(a) ACM 결과 (b) p-ACM 결과 그림 6. 정면 내측원에 대한 ACM과 p-ACM의 추출 결
과
Fig. 6. Contour extraction results of ACM and p-ACM on front inner circle.
↓ 확대 ↓ 확대
(a) ACM 결과 (b) p-ACM 결과 그림 7. 측면 경사부에 대한 ACM과 p-ACM의 추출 결
과
Fig. 7. Contour extraction results of ACM and p-ACM on side slope portions.
↓ 확대 ↓ 확대
(a) ACM 결과 (b) p-ACM 결과 그림 8. 측면 기둥부에 대한 ACM과 p-ACM의 추출
결과
Fig. 8. Contour extraction results of ACM and p-ACM on side column portions.
(a) 정면 (b) 측면
그림 9. 정상 제품에 대한 p-ACM의 윤곽선 추출 결과 Fig. 9. Contour extraction results of p-ACM on
defect-free tube.
(a)(c)(d)는 가공 공정상에 발생한 이물질 들이 영상 내 에 존재하거나 성형 공정상에서 오류가 발생한 경우, (b)는 가공품의 방향이 약간 틀어진 경우, (e)(f)는 조명 환경이 달라진 경우의 예이다.
(a) 정면 1 (b) 측면 1
(d) 측면 2 (c) 정면 2
(f) 측면 3 (e) 정면 3
그림 10. 불량 제품에 대한 p-ACM의 윤곽선 추출 결과 Fig. 10. Contour extraction results of p-ACM on
defective tube.
2. 원형 유사도 비교
실험을 위해 총 85개의 튜브 부품에 대하여 정면 영 상과 측면 영상을 두 장씩 촬영하여 총 340장의 튜브 이미지를 취득하였고, ACM과 p-ACM의 유사도를 비 교 실험한 결과는 표 1과 같다. p-ACM의 유사도가 평 균 9.85% 더 높게 측정되었으며, 특히 정면 내측과 측 면 경사부에서 p-ACM의 추출 결과가 보다 더 원형에 가까운 검출 결과를 보였다.
ACM p-ACM
정면 내측 유사도 0.776 0.909 정면 외측 유사도 0.839 0.879 측면 경사부 유사도 0.427 0.618 측면 기둥부 유사도 0.940 0.971
평균 0.7455 0.844
표 1. 유사도 비교
Table 1. Similarity comparison.
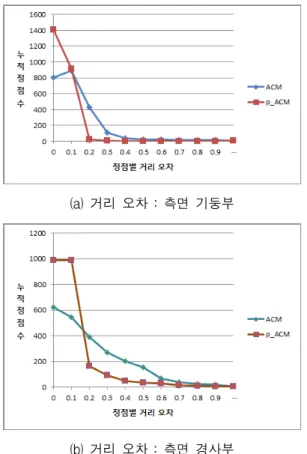
또한, 원형과 찾아진 윤곽선의 정점들과의 거리 오차 를 측정하여 비교하였다. 원의 경우는 원의 중심을 기 준으로 원 원형과 윤곽선 정점간의 수직거리를, 직선의 경우는 직선 원형과 윤곽선 정점간의 y축 방향 수직 거 리를 각각 반지름과 기준축의 일정 비율을 기준으로 0.0~1.0 사이의 수치로 정규화하여 각 거리 오차별 누 적정점수를 표현하였으며 그림 11, 12와 같다. 전반적으 로 p-ACM의 결과에서 0.0~0.4 거리 구간 내에 더 많 은 정점들이 위치해 있으며 특히, 정면 내측 원과 측면 경사부, 그리고 측면 기둥부에서 직선 원형, 원 원형에 보다 가까운 윤곽선을 추출함을 보였다.
표 2는 제안하는 윤곽선 추출 알고리즘의 처리 시간 을 측정한 결과이다. 원형분석과 p-ACM 처리 모듈이 추가되어 기존 ACM을 이용한 방법에 비해 처리시간이 37% 증가하였으나 p-ACM 모듈은 ACM에 비해 수행 시간이 짧은 것으로 나타났다. 그 이유는 원형 분석 과 정으로 설정된 초기 윤곽선의 정확도가 높아 탐색 시간 이 줄었기 때문인 것으로 분석된다.
(a) 거리 오차 : 정면 외측
(b) 거리 오차 : 정면 내측
그림 11. 정면에서의 ACM, p-ACM 거리 오차 비교 Fig. 11. Distance error comparison between ACM and
p-ACM on the front.
(a) 거리 오차 : 측면 기둥부
(b) 거리 오차 : 측면 경사부
그림 12. 측면에서의 ACM, p-ACM 거리 오차 비교 Fig. 12. Distance error comparison between ACM and
p-ACM on the side.
기존 방법 제안 방법
전처리 0.325 0.325
ACM 0.142 0.142
원형분석 - 0.060
p-ACM - 0.113
합계 0.467 0.640
표 2. 모듈별 처리 시간 비교
Table 2. Comparison of processing time for each module.
Ⅳ. 결 론
본 논문은 산업 현장을 가정한 환경 조건에서 물체가 가지고 있는 윤곽선을 찾는 방법에 대한 연구이다. 직 선과 원의 형태 요소를 가지고 있는 튜브 부품을 대상 으로 기존의 ACM을 적용하여 초기 윤곽선을 추출하고 이후 직선, 원 원형을 정의하고 분석하였다. 기존의 스 네이크 알고리즘에서 사용하는 내부에너지와 영상에너 지에 원형에너지를 추가로 사용하는 p-Snake 알고리즘 을 제안하였다. 이를 통하여 조명 및 배경 등의 영향으
로 아주 약한 에지성분이 있거나 형태의 윤곽이 선명하 지 않은 작은 튜브 부품의 경우에도 불량 여부를 판단 할 수 있는 근거가 되는 주요 계측 대상 영역에 대한 직선, 원 형태의 윤곽선 추출이 가능함을 보였다. 향후 에는 추출된 윤곽 정보를 산업현장의 비전검사시스템 구축에 활용하는 실용화를 위한 연구가 필요하다.
REFERENCES
[1] R. O. Duda and P. E. Hart, “Use of the Hough transform to detect lines and curves in pictures,
” Commum. ACM 15, No. 1, pp. 11-15, 1972.
[2] Y. S. Lee, H. S. Koo, and C. S. Jeong, “A straight line detection using principal component analysis,” Pattern Recognition Lett. 25, pp. 1-13, 2004.
[3] Y. Lei and K. C. Wong, “Ellipse detection based on symmetry,” Pattern Recognition Letters, vol.
20, no. 1, pp.41-47, 1999.
[4] M. Kass, A. Witkin, and D. Terzopoulos,
“Snakes: Active Contour Models,” Int'l Journal of Computer Vision, pp.321-331, 1988.
[5] D. J. Williams and M. Shah, “A Fast Algorithm for Active Contours and Curvature Estimation,”
CVGIP: Image Understanding Vol. 55, No. 1, pp.14-26, Jan. 1992.
[6] C. Xu and J. Prince, “Snakes, Shapes, and Gradient Vector Flow,” IEEE Trans. on Image Processing, vol.7, no.3, pp. 359-368, 1998.
[7] L. Liu, A. C. Bovik, “Active contours with neighborhood-extending and noise-smoothing gradient vector flow external force,” EURASIP Journal on Image and Video Processing, 2012, 2012:9
[8] L. Cohen, “On Active Contour Models and Balloons,” CVGIP: Image Understanding, pp.
1-18, 1991.
[9] S. Krinidis and V. Chatzis, “Fuzzy energy-based active contour,” IEEE Trans. on Image Process.
vol. 18, no. 12, pp. 2747–2755, 2009.
[10] Y. W. Kim and B. H. Jun, “Facial Contour Extraction in Moving Pictures by using DCM mask and Initial Curve Interpolation of Snakes,”
Journal of the institute of Electronics and Information Engineers, Vol.43, CI, no.4, pp.
58-66, July, 2006.
저 자 소 개 오 승 택(정회원)
2000년 2월 공주대학교 전자계산학과 이학사 2002년 2월 공주대학교
전자계산학과 이학석사 2005년 3월~현재 공주대학교 컴퓨터공학과 박사과정
<주관심분야 : 컴퓨터비전, 가상현실>
전 병 환(평생회원) 1989년 2월 연세대학교 전자공학과 공학사 1991년 8월 연세대학교 전자공학과 공학석사 1996년 8월 연세대학교 전자공학과 공학박사 1997년 3월~현재 공주대학교 컴퓨터공학부 교수 2000년~2001년 ㈜모리아테크놀로지 연구소장 2001년 MWW의 Who's Who in the World 등재 2008년 대한전자공학회 학술연구위원
<주관심분야 : 컴퓨터비전, 가상현실, 유비쿼터스 컴퓨팅>