차량용 내비게이션 데이터를 이용한 보행 네트워크 및 경로 생성 기법
Study on the Method to Create a Pedestrian Network and Path using Navigation Data for Vehicles
1)
가칠오*ㆍ이원희**ㆍ유기윤***
Ga, Chill OㆍLee, Won HeeㆍYu, Ki Yun
要 旨
최근 들어 스마트폰 등 모바일 단말기의 활용이 증대되면서 이동 중인 보행자에게 길안내 서비스를 제공하는 보행 자 내비게이션 서비스의 필요성이 증가하고 있다. 이러한 내비게이션 서비스에서 도로 네트워크는 경로와 안내 정 보를 생성하는데 있어 가장 핵심적인 요소이다. 하지만, 차량을 위한 도로 네트워크에 비하여 보행 네트워크는 더 욱 상세하고 방대한 공간에 대한 모델링 기법이 요구된다. 따라서 기존에 현지 조사와 수동 편집 과정을 통하여 구축하는 방법보다 효율적인 방안이 요구된다. 따라서 본 연구에서는 기 구축되어 있는 차량용 내비게이션 데이터 를 기반으로 보행자에게 적합한 보행 네트워크 생성 기법을 제안하였다. 보행 네트워크는 실제 보행자의 이동과 유사한 경로를 생성하기 위하여 보행 공간을 그 특성에 따라 보행 링크(인도, 이면도로, 보행 시설물)와 오픈 스페 이스 링크로 구분하고 서로 다른 방법을 적용하여 구축하였다. 이와 같은 기법은 보행 네트워크 생성에 관한 표준 및 방법론이 존재하지 않는 현 시점에서 하나의 효율적인 대안으로 활용될 수 있을 것으로 판단된다.
핵심용어 : 보행자 내비게이션 시스템, 보행 네트워크, 보행 경로, 오픈 스페이스
Abstract
In recent years, with increasing utilization of mobile devices such as smartphones, the need for PNS(Pedestrian Navigation Systems) that provide guidance for moving pedestrians is increasing. For the navigation services, road network is the most important component when it comes to creating route and guidance information. In particular, pedestrian network requires modeling methods for more detailed and vast space compared to road network.
Therefore, more efficient method is needed to establish pedestrian network that was constructed by existing field survey and manual editing process. This research proposed a pedestrian network creation method appropriate for pedestrians, based on CNS(Car Navigation Systems) data that already has been broadly constructed. Pedestrian network was classified into pedestrian link(sidewalk, side street, walking facility) and openspace link depending on characteristics of walking space, and constructed by applying different methodologies in order to create path that similar to the movements of actual pedestrians. The proposed algorithm is expected to become an alternative for reducing the time and cost of pedestrian network creation.
Keywords : PNS(Pedestrian Navigation System), Pedestrian Network, Pedestrian Path, Openspace
1. 서 론
차량용 내비게이션 시스템(Car Navigation System, 이하 CNS)은 위치기반 서비스(Location Based Service,
이하 LBS)의 가장 대표적인 수단으로 인지되고 있다.
이와 함께 최근 들어 측위 기술 및 무선 통신의 발달과 모바일 단말기 시장이 확대되면서 복잡한 도심지, 관광 지, 대형 실내 공간 등에서 사용자에게 특정 목적지까
2011년 7월 18일 접수, 2011년 8월 16일 채택
* 정회원ㆍ서울대학교 대학원 지구환경시스템공학부 박사과정([email protected])
** 교신저자ㆍ조선대학교 토목공학과 조교수([email protected])
*** 종신회원ㆍ서울대학교 지구환경시스템공학부 부교수([email protected]) 연구논문
68 가칠오ㆍ이원희ㆍ유기윤
지 길안내 서비스를 제공하는 보행자 내비게이션 서비 스(Pedestrian Navigation System, 이하 PNS)의 수요 가 증가하고 있다(Elias 등, 2004).
이러한 내비게이션 시스템에서 도로 네트워크는 경 로 탐색 및 안내 정보를 생성하기 위한 가장 중요한 요 소라 할 수 있다. 현재 CNS를 위한 도로 네트워크는 실세계의 교차로와 도로를 점(point)과 선(line)으로 추 상화하고, 이들 간에 위상구조를 부여한 노드/링크 모 델(Goodchild, 2000)을 활용하고 있으며, 이미 국내외 에 관련 표준들이 존재하고 있다(국토해양부, 2009;
ISO, 2003). 하지만, PNS에 있어서는 서비스 초기 단 계로써 관련 모델 및 표준이 존재하지 않고 있다. 일부 초기 PNS에서는 기존 차량용 도로 네트워크를 그대로 활용하여 서비스하기도 하였지만, 실세계에서 보행자 의 이동 공간은 도로 영역으로 한정되지 않으며 인도, 횡단보도, 공원 등 차량에 비하여 더욱 상세하고 방대 한 공간에 대한 모델링이 요구되기 때문에 기존 도로 네트워크를 기반으로 탐색된 보행 경로는 실제 보행자 의 이동 경로와 많은 차이가 나게 된다. 또한, 기존에 상당부분 현지조사와 편집에 의존한 도로 네트워크의 구축 및 갱신 방안을 통하여 보행 네트워크를 구축하는 것은 시간과 비용 측면에서 매우 비효율적이다.
이와 같은 문제점을 인지하고 최근 효율적인 방법으 로 보행자에게 적합한 네트워크 및 경로 생성에 관한 연구들이 이루어지고 있다. Yuefeng 등(2009)은 보행 이 인간의 가장 기본적인 교통수단으로 언급하고, PNS 를 위한 네트워크 생성 모델을 제시하였다. 이를 위해 보행 공간을 그 형상 특성에 따라 점, 선, 면의 지오메 트리 타입으로 정의하고, 이들을 연계한 보행 네트워크 생성 방안을 제시하였다. 또한, 기존의 차량 및 대중교 통 네트워크와의 연계 모델도 함께 제시하였다. Elias(2007)는 지형도, 지적도, 평면도 등 다양한 목적 으로 기 구축된 공간 정보 데이터로부터 보행 공간을 추출하고 통합함으로써 방대한 보행 네트워크를 효율 적으로 생성하였다. Walter 등(2006)은 일반적으로 벡 터 환경에서 분석되던 경로를 래스터 환경에서 분석하 였다. 이를 위해 벡터 공간을 보행 가능한 영역과 불가 능한 영역의 이진 래스터 영상으로 변환한 후, 모폴로 지 연산을 반복적으로 수행하여 한 픽셀로만 이루어진 뼈대(skeleton)를 보행 네트워크로 활용하였다.
보행 네트워크 생성에 관한 연구와 함께 기존 CNS 에서는 고려되지 않았던 공원, 광장, 운동장 등 보행자 가 자유롭게 이동할 수 있는 넓은 공간 즉, 오픈 스페이 스(open space)를 효과적으로 표현하기 위한 연구도 함 께 진행되고 있다. Gaisbauer 등(2008)은 기존 중심선
기반의 노드/링크 모델을 PNS에 그대로 적용할 경우 보행자의 높은 이동 자유도를 반영하지 못한다는 문제 점을 지적하고, 과도하게 추상화된 노드(decision point) 주변에 링크를 추가적으로 연결하는 기법 (decision scene)을 적용하여 보행자가 더욱 다양한 경 로를 활용할 수 있도록 하였다. Zheng 등(2009)은 오 픈 스페이스 내에서 자유로운 이동 경로를 생성하기 위 하여 보행이 불가능한 영역 즉, 장애물을(hole)포함하 는 복잡 폴리곤(complex polygon)으로 표현하고, 폴리 곤을 구성하는 결절점(vertex)들 간의 모든 쌍을 라인 으로 연결한 ESPO(Euclidean Shortest Path with Obstacles) 알고리즘을 제시하였다. Pun-Cheng 등(2007) 은 노드/링크 모델을 생성하고 갱신하는데 어려움과 보 행자에 적합한 경로 서비스의 부재를 지적하고, 이를 위해 로봇의 이동 경로 생성 기법(motion-planning)을 적용한 새로운 접근 방법을 제시하였다. 보행이 가능한 공간과 그 내부의 장애물을 이용하여 exact cell decomposition 기법으로 공간을 다양한 형태의 셀로 분할하고, 이렇게 분할된 셀들의 인접 관계로 네트워크 모델을 생성하여 경로를 산정하였다.
이상과 같이 보행자에게 적합한 네트워크를 생성하 기 위하여 다양한 연구가 진행되고 있음에도 불구하고 실용적인 관점에서 몇 가지 문제점이 존재한다. 첫째, 보행 네트워크를 생성하기 위하여 기존 연구에서는 다 양한 기 구축된 데이터를 활용하고 있지만, 서로 다른 목적을 가지고 구축된 데이터들은 표현 규칙 및 형식이 서로 상이하기 때문에 데이터 변환 및 융합 과정이 수 반되어야 한다. 둘째, 기존 연구에서 일반적으로 활용 하고 있는 지형도와 같은 기본도는 내비게이션 서비스 로 활용하기 위한 데이터의 최신성을 반영하기 어렵다.
또한, 현재 대부분의 보행 네트워크는 차량 네트워크와 유사하게 도로 중심선 위주로 구축되어 실제 보행자가 이동하는 인도, 오픈 스페이스 등의 보행 경로를 제대 로 반영하지 못하고 있다. 따라서 본 연구에서는 이러 한 문제점들을 제거하기 위하여 CNS 데이터를 기반으 로 보행자의 이동 특성을 반영한 보행 네트워크의 효율 적인 생성 기법을 제안하였다. CNS 데이터는 차량 내 비게이션을 목적으로 구축되었지만, 상세한 도로 네트 워크 및 배경 레이어 등 보행 네트워크를 생성하기 위 한 많은 데이터가 중복되어 구축되어 있다. 무엇보다, 현재 널리 활용되고 있는 서비스로 신뢰성 높은 데이터 가 많이 구축되어 있으며 매우 짧은 주기로 갱신되는 장점을 가지고 있다. 본 연구에서는 이러한 데이터를 기반으로 실세계에서 보행자가 이동하는 공간인 인도, 이면도로, 보행 시설물, 오픈 스페이스를 포함하는 보
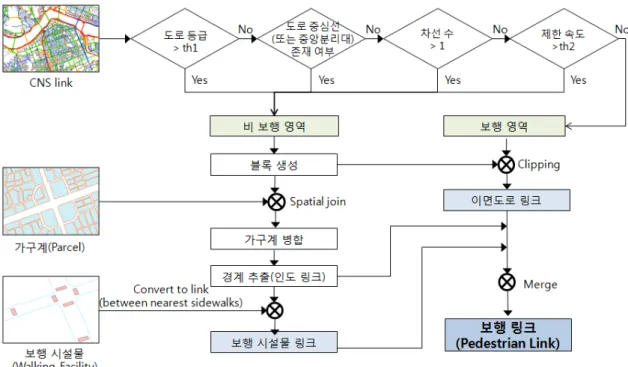
그림 1. 보행 링크 생성 프로세스 행 네트워크를 구축하였다.
2. 보행 네트워크 생성 기법
본 연구에서 보행 네트워크는 보행 링크와 오픈 스페 이스 링크로 구성된다. 보행 링크는 인도, 이면도로, 보 행 시설물 등 보행 공간의 형상이 비교적 길고 폭이 좁 은 형태를 띠고 있어 선형으로 추상화하기에 적합한 공 간을 표현하며, 오픈 스페이스 링크는 공원, 광장 등 넓 은 공간을 표현한다.
Pedestrian Link = { sidewalk link ∪ sidestreet link
∪ walking facility link }
Pedestrian Network = { Pedestrian Link ∪ Openspace link }
2.1 보행 링크 생성
CNS에서 도로는 구축 및 관리 기관에 따라 다소 차 이는 있지만, 일반적으로 그 기능과 수용량에 따라 계 층적으로 분류하고, 경로 탐색 및 안내 정보 생성을 위 하여 도로 구간과 교차로를 중심으로 형상, 속성, 위상 정보 등을 포함하여 구축된다(GDF, 2003; Navteq, 2008). 본 연구에서는 이와 같이 도로의 특성을 반영하 고 있는 CNS 링크의 속성 정보를 활용하여, 그림1과
같이 도로의 양 측면에 인도가 존재하지 않는 고속도로 및 고속화도로 등을 제외하고, 도로 등급, 중앙선(또는 중앙분리대), 차선 수, 제한 속도 정보를 활용하여 비 보행 영역과 보행 영역으로 분류하였다. 여기서 비 보 행 영역은 차량 전용 도로로써 보행 시설물을 이용하지 않고 보행자의 횡단이 불가능한 도로(non-walkable road) 영역을 의미하며, 보행 영역은 일반적으로 제한 속도 10km 이내 그리고 비교적 차선폭이 좁은 1차선 도로로써 차량과 보행자의 구분없이 이동이 가능한 이 면도로 또는 단지 내 도로(walkable road) 영역을 의미 한다.
인도는 보행을 목적으로 구축된 도로로써 보행자가 가장 빈번하게 활용하는 도로이다. 이러한 인도는 실세 계에서 차량 도로의 양 측면을 따라 존재한다. 따라서 본 연구에서 인도로 구성되는 인도 링크를 추출하기 위 하여 그림 2와 같이 비 보행 도로로 폐합된 블록을 형 성한 후, 각 내부에 존재하는 가구계 폴리곤을 병합하 고, 그 경계선을 취함으로서 이중선(dual line) 형태로 구축하였다. 이 과정은 폐합된 블록과 가구계 폴리곤들 간에 공간 조인(spatal join) 연산을 통하여 가구계 폴 리곤을 그룹화하고, 삼각망 기반의 폴리곤 병합 (aggregation)(Lee, 2006)을 수행하여 경계선을 추출하 였다(그림 3).
이면도로 링크는 차량과 보행자의 구분없이 이동이
70 가칠오ㆍ이원희ㆍ유기윤
그림 2. 블록 생성 그림 3. 인도 링크 생성 그림 4. 이면도로 링크 생성
가능한 도로로써 앞서 분류된 보행 영역에 대하여 인도 링크로 폐합된 모든 폴리곤 즉, 블록과 교차 연산을 수 행한 후 내부 영역만을 추출함으로써 생성하였다. 그림 4는 생성된 인도 링크와 이면 도로 링크가 병합된 결과 를 나타낸다.
그림 4와 같이 블록 단위로 생성된 보행 링크들은 비 보행 영역에 의해서 서로 분리되어 있으며, 보행자는 이러한 공간을 횡단보도, 육교, 지하보도 등의 보행 시 설물을 통해서만 이동이 가능하다. CNS 데이터에서 보 행 시설물은 안내 정보 생성과 운전자의 시각적 판단을 위하여 그 위치와 형상정보(polygon)를 포함하고 있다.
따라서 본 연구에서 이 정보를 활용하여 서로 다른 블 록을 연계할 수 있는 보행 시설물 링크를 생성하였다.
구축 과정은 보행 시설물의 중심점을 기반으로 가장 가 까운 두 개의 서로 다른 블록을 탐색한 후 중심점과 해 당 블록의 인도 링크 중 최단 거리에 존재하는 위치와 연결한다. 그림 5는 횡단보도와 육교가 보행 시설물 링 크로 생성된 예를 나타낸다.
그림 5. 보행 시설물 링크 생성
2.2 오픈 스페이스 링크 생성 및 경로 단순화 오픈 스페이스는 실세계 공간에서 하천, 건물, 자동 차 전용 도로 등 보행이 불가능한 공간을 제외하고 자 유롭게 이동 할 수 있는 공간의 집합을 의미한다. 즉, 오픈 스페이스는 보행이 불가능한 공간을 홀(holes)로 가지는 폴리곤으로 표현될 수 있으며, 도시 공간 구조 를 연구하는 분야에서 매우 중요한 요소로 간주되고 있 다(Jiang 등, 2010). 하지만, 내비게이션 관련 연구에서 오픈 스페이스는 사전에 정의된 경로가 존재하지 않는 공원, 운동장, 광장 등 보행자가 자유롭게 이동할 수 있 는 넓은 공간으로 다소 협소하게 정의하게 정의되고 있 다. 본 연구에서는 이러한 오픈 스페이스 공간에 적합 한 보행 경로를 생성하기 위하여 해당 공간의 형상을 반영하는 중심선을 오픈 스페이스 링크로 생성한 후, 이를 기반으로 탐색된 경로를 동적으로 단순화하는 기 법을 적용하였다. 중심선 추출 기법은 이미 래스터 또 는 벡터 기반의 다양한 알고리즘들이 존재하고 있다.
본 연구에서는 상대적으로 형상을 정확히 묘사하고 경 계의 잡음에 민감하지 않은 특성을 가지고 있는 Deseilligny(1998)의 래스터 기반 알고리즘을 적용하였 다. 이 알고리즘은 수계망을 형성하는 것과 유사하게 경계 셀에서부터 내부 방향으로 값을 누적한 후 잔 가 지들을 순차적으로 제거함으로써 원 형상을 가장 잘 표 현하는 중심선을 추출하는 알고리즘(veinerization)이 다. 그림 7은 아파트 단지 내 오픈 스페이스에 대해서 너비 100m 이내의 모든 공간에 대하여 생성된 오픈 스 페이스 링크를 타나낸다.
보행 네트워크에 이러한 오픈 스페이스 공간을 포함 시키기 위하여 추출된 중심선은 출입구 정보를 활용하 여 보행 링크와 병합을 수행하였다. 하지만, 이와 같이 중심선으로 추상화된 오픈 스페이스 링크는 보행 링크 와 함께 일반적인 벡터 기반의 경로 탐색 알고리즘을 그대로 적용할 수 있는 장점이 존재하지만, 과도한 추 상화로 인하여 실제 보행자의 이동 경로와는 많은 차이
그림 6. 오픈 스페이스에 대한 중심선 추출 예
그림 7. 오픈 스페이스에서 보행 경로의 단순화
가 존재할 수 있다. 따라서 본 연구에서는 경로 탐색 후 오픈 스페이스를 지나는 경로 구간에 대하여 가시적으 로 확보된 공간을 따라 이동이 가능하도록 경로 단순화 기법을 제안하였다. 경로 단순화는 현재 버텍스에서 다 음 버텍스를 순차적으로 연결한 직선과 해당 오픈 스페 이스 폴리곤(boundary)과의 교차 여부를 판단하여 교 차되지 않는 직선으로만 구성되도록 버텍스를 삭제하 는 과정이다(표 1). 그림 7은 오픈 스페이스를 통과하 는 경로(red line)에 대하여 경로 단순화 기법을 적용한 예시(blue chain line)를 나타내며, 이러한 경로는 실세 계에서 보행자가 이동하는 패턴과 더욱 유사한 경로라 할 수 있다.
Algorithm SimplifiedPath(V)
Input : V(a set of vertices of path in openspace) Output : SP(simplified path)
CV:current vertex NV:next vertex OB:openspace boundary 1. Initialize SP.Add(v0); cv=v0;
2. for all vertices v∊V
3. if( intersect(line(cv to nv)) with OB) 4. SP.Add(vi-1)
5. CV = vi-1 6. else
7. NV = vi+1 8. return SP
표 1. 보행 경로 단순화 알고리즘
2.3 보행 네트워크의 위상 구조 생성
생성된 보행 링크와 오픈 스페이스 링크는 보행 공간 에 대하여 단순히 추상화된 표현으로 경로 생성을 위해 서는 이들 간에 위상 정보가 필요하다. 이를 위해 생성 된 링크들을 기반으로 모든 교차점을 탐색하여 노드 (
)와 노드 간에 보행 링크 (
)를 재생성 한 후, 노드에는 연결 링크의 ID 리스트, 링크에는 시작 노드(from node) ID와 목적 노드(to node) ID를 부여하여 최종적 으로 보행 네트워크( )를 생성하였다.단, 보행자는 보행 공간을 이동하는데 있어 차량과 달 리 방향성과 회전 규제 등이 존재하지 않기 때문에 무
72 가칠오ㆍ이원희ㆍ유기윤
도로 등급 링크 수(개) 링크 길이(km)
인도(Level 1) 2,455 215.716
이면도로(Level 2) 3,373 216.215
오픈 스페이스(Level 3) 10,357 365.519
보행 시설물(Level 4) 539 14.405
합 계 16,724 811.855
표 2. 보행 네트워크의 링크 수 및 길이
그림 8. 보행 네트워크 방향 그래프(undirected graph)의 특성을 가진다. 또한,
보행 공간의 특성에 따라 인도 링크(level 1), 이면도로 링크(level 2), 보행시설물 링크(level 3), 오픈 스페이 스 링크(level 4)에 각각 등급을 부여하였으며, 보행 시 설물은 그 종류에 따라 코드(횡단보도:01, 육교:02, 지 하보도:03)를 다르게 부여하였다. 이는 향후 보행자의 선호도 및 교통 약자에 적합한 경로를 생성하기 위함이 다. 예를 들어 보행에 인도 중심 경로, 계단을 회피한 경로 등을 탐색할 경우, 제약 조건으로 활용될 수 있다.
3. 실험 결과 및 분석
연구에 활용된 데이터는 CNS 데이터 중에서 도로 네트워크의 링크 데이터와 배경 지도의 가구계 (polygon), 오픈 스페이스(polygon), 출입구(point), 보 행 시설물(polygon) 레이어를 활용하였으며, 테스트 지 역은 서울 송파구를 대상으로 하였다. 표 2는 본 연구 에서 제안한 방법론으로 구축된 보행 공간 별 링크 수 와 총 길이를 나타낸다. 총 링크 수는 16,724개, 길이는 811.85km로 동일한 지역의 도로 네트워크(링크 수 : 5205개, 길이 : 456.4km)에 비하여 보행 네트워크의 그 수와 길이가 매우 증가함을 할 수 있다. 이는 도로를 중심으로 이중선으로 구축된 인도와 차량 네트워크에
서는 고려되지 않았던 오픈 스페이스, 보행 시설물 등 의 공간을 포함하기 때문이다.
그림 8은 시각적 분석을 위하여 생성한 보행 네트워 크를 KML(Keyhole Markup Language) 포맷으로 변 환하여 민간 포털의 위성 사진과 중첩한 그림을 나타낸 다. 주황색선은 인도 링크, 파란색선은 이면도로 링크, 녹색선은 오픈 스페이스 링크, 그리고 빨간색선은 보행 시설물 링크를 나타내며, 우측은 보행 링크와 오픈 스 페이스 영역을 중심으로 확대한 그림을 나타낸다. 도로 영역만을 중심선으로 표현한 도로 네트워크와 달리 본 연구에서 생성한 보행 네트워크는 실제 보행자가 활용 하는 다양한 공간들을 잘 반영함을 알 수 있다. 하지만, CNS 데이터에서 오픈 스페이스는 단순히 시각적 표현 을 위해 구축되고, 출입구 정보 역시 건물을 중심으로 구축되어 있어 오픈 스페이스 링크를 생성하는데 있어 데이터 측면에서 다소 한계점이 존재하였다. 이는 향후 지도 생산 및 내비게이션 관련 업체들이 향후 PNS로 확장된 서비스를 고려하여 데이터 구축 과정에서 보다 정밀한 모델링이 수행된다면 보완될 수 있을 것으로 판 단된다.
그림 9와 그림10은 구축된 보행 네트워크를 기반으 로 다익스트라(Dijkstra) 경로 탐색 알고리즘을 적용하 여 탐색된 보행 경로를 나타낸다. 그림 11은 보행 링크
그림 9. 보행 링크만으로 구성된 보행 경로
그림 10. 오픈 스페이스 링크를 포함하는 보행 경로
를 중심으로 탐색된 보행 경로로서, 임의의 출발점과 도착점을 연결하는 보행 경로는 이면도로와 인도 그리 고, 서로 다른 블록에 존재하는 인도 간에는 횡단보도 를 통하여 연계됨을 알 수 있다. 그림 11은 보행 링크 와 오픈 스페이스 링크를 모두 포함하는 보행 경로를 나타낸다. 탐색 후 구성된 링크의 등급을 판단하여 오 픈 스페이스 링크(level 3)가 포함되어 있으면 해당 오 픈 스페이스 내에서 경로 단순화가 수행되어 넓은 공간 에서 보행자가 불필요하게 우회하지 않고 목적지 방향 으로 가시적으로 확보된 공간을 따라 이동하는 경로 (yellow dotted line)로 보정됨을 알 수 있으며, 경로 단 순화의 효과는 오픈 스페이스 공간이 넓을수록 더욱 증 대되는 결과를 보였다.
4. 결 론
CNS는 LBS의 가장 대표적인 서비스로 널리 활용되 고 있어 이미 많은 데이터가 구축되어 있으며, 갱신 주 기에 있어 다른 공간정보 데이터에 비하여 매우 빠른 장점을 가지고 있다. 본 연구에서는 이와 같은 차량을 대상으로 한 CNS 데이터를 기반으로 자동화된 보행 네트워크 생성 기법과 이에 적합한 경로 탐색 기법을 제시하였다. 이를 위해 첫째, 실 세계의 보행 공간을 인 도, 이면도로, 보행 시설물, 오픈 스페이스로 정의하고, 둘째, 각 영역에 적합한 형태로 보행 링크와 오픈 스페 이스 링크 생성, 셋째, 이를 위상구조를 포함한 보행 네 트워크로 통합하고 보행 경로 생성에 적합한 경로 탐색
74 가칠오ㆍ이원희ㆍ유기윤
기법을 적용하였다. 특히, 본 연구에서는 보행자가 많 이 활용하는 공간임에도 불구하고, 현재 대부분의 보행 경로 서비스에 포함되지 않고 있는 오픈 스페이스에 대 하여 중심선 기반의 보행 링크 생성 기법과 경로 단순 화 기법을 적용하여 실제 보행자가 이동하는 경로와 유 사한 탐색 기법을 제시하였다. 본 연구에서 제시한 기 법은 보행자에게 적합한 네트워크 구축 및 경로 생성 기법에 대한 기술이 확립되지 않은 현 시점에서 하나의 대안으로 활용될 수 있을 것으로 판단된다. 하지만, 보 행 경로 서비스는 보행자의 안전과 직결되기 때문에 실 제 활용하기에 앞서 전반적인 검토가 선행되어야 할 것 이다.
감사의 글
이 논문은 2011학년도 조선대학교 학술연구비의 지 원을 받아 연구되었음
참고문헌
1. 지능형교통체계 표준 노드ㆍ링크 구축 기준(국토해양부 고시 제2009-805호)
2. Deseilligny, M.P., Stamon, G. and Suen, C.Y., Veinerization: A New Shape Description for Flexible Skeletonization, IEEE Transaction on Pattern Analysis and Machine Intelligence, Vol.20, No.5, pp.505-521.
3. Elias, B., 2007, “Pedestrian navigation - Creating a tailored geodatabase for routing”, In Proceeding from 4th Workshop on Positioning, Navigation and Communication, pp.41-47.
4. Elias, B., Hampe, M. and Sester, M., 2004.
“Adaptive visualisation of landmarks using an MRDB”, Map-based Mobile Services Theories, Methods and Implementations. Springer, pp.75-88.
5. Gaisbauer, C., Frank, A. U., 2008 Wayfinding Model For Pedestrian Navigation, 11th AGILE International Conference on Geographic Information Science, University of Girona, Spain.
6. Goodchild, M. F., 2000, “GIS and Transportation:
Status and Challenges”, GeoInformatica, Vol.4.
pp.127-139.
7. ISO/TC204. Intelligent transport systems – Geographic Data File(GDF) – Overall data specification(ISO 14825:2004) 2003.
8. Jiang, B., Liu, X., 2010, “Automatic generation of the axial lines of urban environments to capture what we perceive”, International Journal of Geographical Information, 24(4), pp.545-558.
9. Lee D., 2006. Design and experience of generalization Tools. AutoCarto 2006, Vancouver, WA, USA.
10. NAVTEQ, 2008. NAVTEQ’s NAVSTREETS Street Data Reference Manual v3.0, p.1178.
11. Pun-Cheng, L.S.C., Tang, M.Y.F. and Cheung, I.K.L., 2007, Exact cell decomposition on base map features for optimal path finding. International Journal of Geographical Information Science, 21(2), pp.175-185.
12. Walter, V., Kada, M., and Chen, H., 2006, Shortest path analyses in raster maps for pedestrian navigation inlocation based systems. International Symposium on “Geospatial Databases for Sustainable Development”, Goa, India, ISPRS Technical Commission IV (on CDROM) Ebenfalls erschienen in GIS 2006, pp.8-11.
13. Yuefeng Liu, Ting Liu, Min Lu, and Huabo Sun, 2009, Study on the Pedestrian Network Model Oriented to Pedestrian Navigation, 2009 Third International Conference on Multimedia and Ubiquitous Engineering, pp.465-470.
14. Zheng Pan, Lei Yan, Winstanley, A. C., Fotheringham A. S., and Jianghua Zheng, 2009, A 2-D ESPO Algorithm and Its Application in Pedestrian Path Planning Considering Human Behavior, 2009 Third International Conference on Multimdedia and Ubiquitous Engineering, pp.485-491.