https://doi.org/10.12673/jant.2016.23.6.526
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 26 November 2019; Revised 30 November 2019 Accepted (Publication) 29 December 2019 (30 December 2019)
*Corresponding Author Jae-Hee Seo Tel: +82-42-870-3971
E-mail: [email protected]
사용자 이동 패턴 정보를 이용한 인공신경망 기반 실내 위치 추정 방법
ANN based Indoor Localization Method using the Movement Pattern of Indoor User
서 재 희
*· 천 세 범 · 허 문 범 한국항공우주연구원 항법기술연구실
Jae-Hee Seo
*· Sebum Chun · Moon-Beom Heo
*Navigation R&D Division, Korea Aerospace Research Institute, Daejeon 34133, Korea
[요 약]
전파 신호를 이용한 위치 추정 방법은 3개 이상의 앵커로부터 거리 측정치를 획득하여야 한다. 하지만 일반적인 건물은 좁고 기 다란 복도와 모퉁이로 구성되어 있어 3개 이상의 가시 앵커를 확보하기 쉽지 않으며, 이로 인해 멀티 모달 솔루션이 발생하여 사용 자의 위치를 추정하기가 어렵다. 이러한 문제를 극복하기 위해 본 논문에서는 인공신경망을 이용하여 위치를 추정하는 방법을 제 안한다. 인공신경망을 이용하면 멀티 모달 솔루션이 발생하더라도 축적된 거리 측정치를 기반으로 사용자 이동 패턴 정보를 획득 하여 위치를 추정할 수 있다. 해당 방법은 추가적인 장비나 센서가 필요치 않으며 오직 앵커 기반의 거리 측정치만으로 위치를 추 정할 수 있다. 제안된 방법을 검증하기 위해 건물 내에 충분하지 않은 수의 앵커를 설치하여 멀티 모달 솔루션을 발생시킨 상황에 서 위치 추정 테스트를 수행하였다. 그 결과 앵커의 수가 충분치 않은 상황에서도 위치를 추정할 수 있음을 확인하였다.
[Abstract]
Localization methods using radio signals should obtain range measurements from three or more anchors. However, a typical building consists of narrow, long hallways and corners, making it difficult to secure more than three light of sight anchors. The result is a multi-modal solution that makes it difficult to estimate the user's location. In order to overcome this problem, this paper proposes a method for estimating the location using artificial neural networks. Using the artificial neural network, even if a multi-modal solution occurs, the position can be estimated by acquiring user movement pattern information based on accumulated range measurements. The method does not require any additional equipment or sensors, and only anchor-based range measurements can estimate the user's location. In order to verify the proposed method, location estimation tests were performed in situations where the multi-modal solution occurred by installing an insufficient number of anchors in a building. As a result, it was confirmed that the location can be estimated even when the number of anchors is insufficient.
Key word : Artificial neural network, Indoor localization, Anchor, Radio signal, Range measurement.
A B C Hallway
User
Direction of movement
Range Measurement
Period 1st 2nd 3rd
Point
A a b c
B d e f
C g h i
그림
1. 사용자 이동 패턴 정보 확보 예시
Fig. 1. Example of obtaining movement pattern of
indoor user.Ⅰ. 서 론
여러 분야에서 개인 위치 추적의 필요성이 높아짐에 따라 다 양한 방법을 이용한 위치 추적 기술들이 연구되고 있다[1]. 이 중 전파 신호를 이용한 방법은 일반적으로 소형/저가의 사용자 단말을 이용하여 다수 사용자의 위치 추적을 수행할 수 있다는 점에서 개인 위치 추적을 위한 최적의 방법으로 인식되고 있다 .
전파 신호를 이용한 위치 추정 방법은 기본적으로 3개 이상 의 앵커(Anchor)에서 사용자까지의 거리 측정치를 이용하여 위 치를 계산한다[2]. 해당 방법은 창고나 공장 같은 대규모의 개 방된 공간에서는 사용자가 3개 이상의 앵커를 확보하는 것이 어렵지 않다. 그러나 복도와 모퉁이로 이루어진 일반적인 건물 에서는 3개 이상의 앵커를 확보하는 것이 어려울 뿐만 아니라, 충분한 수의 앵커를 확보한다고 하더라도 일직선 상에 배열되 는 등 위치 추정을 위한 좋은 배치를 제공하기 어려운 경우가 대부분이다. 이러한 경우는 멀티 모달 솔루션(multi-modal solution)이 발생하여 사용자의 위치를 추정하기가 어렵다[3].
이러한 문제점을 극복하기 위한 연구들은 다음과 같이 두 가 지로 분류할 수 있다. 첫 번째 방법은 타 센서를 추가하여 앵커 부족 상황에 대처하는 방법이 있다. 일반적으로 관성 센서나 보 행 항법 등을 추가하는 방법으로 DR (dead reckoning) 방법과 결합하는 방법이다[4]. DR 방법은 앵커가 확보되지 않은 상태 에서도 일정 수준의 위치 증분 정보를 제공할 수 있으므로 가시 앵커의 부족 상황에 대처할 수 있다. 그러나 시간에 따른 오차 의 증가가 있으며 이를 해결하기 위해 신발 부위에 관성 센서를 장착하는 등의 연구가 계속되고 있으나 완벽한 해결책이 되기 는 어려운 것으로 알려졌다. 특히 센서의 추가로 인해 사용자 단말의 크기나 중량이 증가하고 단가가 높아지는 문제는 이 방 법의 최대 단점이라고 할 수 있다.
두 번째 방법은 지도 정보를 이용하는 방법이다. 실내 공간 에서의 사람 및 사물의 움직임은 실내 공간에 의해 제한받는 점 을 이용한 방법으로 디지털화된 지도 정보를 이용하여 사용자 의 위치를 제한하는 방법이다[5]. 지도 정보를 이용하는 방법은 일반적인 지도 정보를 이용하는 방법과 노드 링크로 이루어진 지도를 이용하는 방법이 있다. 이러한 방법은 WiFi 신호 등을 이용하는 방법에서 주로 사용되며[6], 복합 센서를 이용하는 경 우에도 최종 위치해의 정확도를 향상시키기 위해 사용되기도 한다[7]. 그러나 사전에 디지털화된 지도를 만들어야 하는 문제 가 있어 맵 DB 구축을 위한 비용이 소요된다. 특히 일반적인 건 물들은 준공 이후 증개축을 통해 건물 구조상의 변화가 많기 때 문에 계속적인 지도의 갱신이 필요하다는 문제점이 있다.
본 연구에서는 앞서 언급한 방법들의 단점을 극복하기 위해 추가 센서와 디지털화된 맵 정보 없이 사용자의 이동 패턴 정보 를 이용하여 가시 앵커의 부족 상황에서 사용자의 위치 추정 성 능을 향상시키는 방법을 이용하였다. 이를 위해 사전에 사용자 에게 기준 궤적 생성 장비를 이용하여 학습 데이터를 생성하고, 이를 이용하여 학습한 인공신경망 (ANN; artificial neural
network)을 이용하여 최종적인 위치 추정을 수행한다. 제안된 방법은 사용자의 이동 패턴을 이용한다는 점에서 디지털화된 지도 데이터 등이 필요치 않으며, 가시 앵커의 개수도 최소화가 가능하다. 특히 사용자의 이동 패턴 정보를 이용하면 가시 앵커 가 존재하지 않는 상황에서도 일정 수준의 이동 패턴을 예측 가 능하다는 장점이 있다.
제안된 방법의 검증을 위해 실제 사용자에게 기준 항법 장비 를 장착하여 학습 궤적을 생성하였으며 , 이를 이용해 학습한 인 공신경망을 이용하여 위치 추정을 수행하였다 . 이 결과 추가 센 서나 맵 정보 없이도 안정적인 위치 추정이 가능함을 확인하였 다 .
본 논문의 구성은 다음과 같다. 먼저 2장에서는 인공신경망 기반으로 실내 위치를 추정할 때 쓰이는 사용자 이동 패턴에 설 명하고 3장에서는 사용자 이동 패턴을 생성시키기 위한 인공신 경망 기법에 관해 설명한다 . 4장에서는 인공신경망 모델 학습 을 위한 학습 데이터와 인공신경망 학습 기법을 제시한다 . 5장 에서는 제시한 인공신경망 모델의 검증을 위해 실제 실내 건물 에서 성능 평가를 수행하였고 , 마지막으로 6장에서 결론을 제 시하였다.
Ⅱ. 사용자 이동 패턴 정보를 활용한 위치 추정
2-1 사용자 이동 패턴 정보
실내 공간의 형상은 고정되어 있고 이 공간 안에서 이동하
는 사용자의 경우 일정한 패턴으로 이동하게 된다 . 일정한 이
동 패턴으로 이동하기 때문에 과거의 이동 히스토리를 알면
1 2
Anchor
User User
그림
2. 앵커가 하나만 존재할 때 멀티 모달 솔루션 상황
발생 예시Fig. 2. Example of the multi-modal solution when
only one anchor exists.Room with no Anchor
Anchor
Ranging Measurement
(Moving)
User without Pedestrian Dead Reckoning Info.
with Movement Pattern Info.
Hallway
그림
4. 앵커가 존재하지 않을 때 멀티 모달 솔루션 상황
발생 예시Fig. 4. Example of the multi-modal solution when the
anchor does not exist.Anchor Anchor
1
2 User
User
그림
3. 앵커가 두 개 존재할 때 멀티 모달 솔루션
상황 발생 예시Fig. 3. Example of the multi-modal solution
when two anchors exist.다음 순간에 이동할 위치를 예측할 수 있다. 이러한 특성을 이 용하여 인공신경망을 학습시키면 다음 순간의 위치를 예상하 는 데 이용할 수 있다.
본 논문에서는 사용자의 위치를 직접 이용하여 위치 정보 를 이동 패턴 정보로서 이용하지 않고 특정 지점의 거리 측정
치를 이동 패턴 정보로서 이용한다. 그림 1은 사용자가 특정 복도에서 왼쪽에서 오른쪽으로 반복적으로 이동하면서 축적
한 거리 측정치 데이터를 나타낸다. 예를 들어, 지점 A에서 측 정한 거리 측정치를 a, b, c, 지점 B에서의 거리 측정치를 d, e, f, 지점 C 에서의 거리 측정치를 g, h, i라고 가정한다. 위치 정 보와 거리 측정치 히스토리는 동일한 정보를 포함하여 일정한 패턴을 유지하므로 획득한 거리 측정치 히스토리를 이용하여 학습된 인공신경망은 다음 순간의 사용자 위치를 추정할 수 있다.
2-2 멀티 모달 솔루션 상황에서 사용자 이동 패턴 정보 활용
앞서 설명했다시피 앵커의 수가 부족한 실내에서 사용자가 이동하다 보면 다양한 멀티 모달 솔루션 상황이 발생할 수 있 다 .
예를 들어, 복도에 앵커가 1개밖에 설치되어 있지 않다면 그림 2와 같은 상황이 발생할 수 있다. 그림 2는 T자형 복도에 서 사용자가 이동할 때에 하나의 앵커에서만 거리 측정치를 수집할 수 있으므로 1의 위치에 있다 하더라도 1과 2의 위치 중에서 특정 지을 수 있는 추가적인 단서가 없다 . 하지만 반복 적으로 사용자가 1의 위치로 이동하면서 축적한 거리 측정치 로 인공신경망을 통해 사용자 이동 패턴을 획득할 수 있으며 , 이로 인해 사용자의 위치를 특정 지을 수 있다 . 이는 T자형 복 도가 아니라 일자형 복도라도 앵커가 부족하면 멀티 모달 솔 루션이 발생할 수 있으며, 이러한 문제를 인공신경망의 학습 을 통해 해결할 수 있다.
그림 3은 앵커가 두 개 존재할 때 멀티 모달 솔루션이 발생 하는 상황이다 . 해당 복도에서 사용자가 이동할 경우 두 개의 앵커로부터 거리 측정치를 수집할 수 있다 . 이 경우 추정할 수 있는 사용자의 위치 후보는 1과 2의 위치가 되지만 추가적인 단서가 없기 때문에 하나의 위치로 특정 지을 수 없다. 그러나 이 또한 반복적으로 사용자가 1의 위치로 이동하면서 축적한 거리 측정치로 인공신경망을 통해 사용자 이동 패턴을 획득할 수 있으며, 이로 인해 사용자의 위치를 특정 지을 수 있다.
그림 4는 앵커가 없는 방 안에 사용자가 들어갔을 경우에
발생할 수 있는 상황을 그린 그림이다 . 일반적으로 복도에서
만 앵커로부터 거리 측정치를 획득하다가 앵커가 없는 방 안
에 들어가게 되면 방 안에 들어간 순간부터 거리 측정치를 획
득할 수 없으므로 사용자의 위치를 알 수가 없다. 하지만 이 또
한 반복적으로 해당 구간을 이동하며 축적한 거리 측정치에서
방 안에 들어간 순간 거리 측정치가 없다는 것이 정보로서 인 공신경망에 학습시킬 수 있고, 이로 인해 사용자 이동 패턴을 획득하여 위치 추정이 가능해진다.
Ⅲ. 인공신경망 기반 실내 위치 추정 기법
본 논문에서 제안하는 실내 위치 추정을 위한 인공신경망 모 델은 가시 앵커의 수가 부족한 상황에서 추가적인 장비 없이 사 용자의 위치를 추정할 수 있는 모델이다. 다음은 해당 인공신경 망 모델을 기반으로 실내 위치 추정을 위한 방법에 관해 설명하 고자 한다 .
3-1 위치 표현 방식
회귀 문제의 해법으로 널리 사용되고 있는 칼만 필터의 경우 상태 변수의 확률 분포 관련 주요 파라미터를 제공한다[8]. 비 선형, 비정규 분포를 갖는 시스템의 상태 추정을 위해 사용되는 파티클 필터의 경우 상태 변수의 확률 분포를 유한한 수의 파티 클 분포와 가중치를 이용해 표현한다[9].
본 연구에서는 개별적인 노드의 출력 값을 이용하여 연속적 인 상태 변수를 표현해야 하는 인공신경망의 특성상 각각의 출 력 노드를 평면상의 그리드 인덱스에 일치시키고 해당 노드의 출력 값을 이용하여 출력 변수의 확률 분포를 추정하였다. 이러 한 방법은 기존의 Grid based filter에서 사용하는 방법과 유사한 방법이며, 확률 분포를 근사적으로 표현한다는 한계가 있으나 비정규 분포를 갖는 상태 변수의 확률 분포를 나타낼 수 있다는 장점이 있다[10]. 그림 5는 그리드 방식으로 나타낸 위치 정보 의 표현 예를 나타낸 것이다.
3-2 입력 정보
가시 앵커가 부족한 환경에서 멀티 모달 솔루션이 발생하며, 이러한 상황에서 참위치를 식별하기 위해서는 보행 항법 등 추 가 센서 정보를 이용하거나 지도 정보를 이용하여야 한다 .
본 논문에서는 이러한 상황에 대한 해결책으로 사용자의 이동 궤적 히스토리 정보를 이용하는 방법을 제안한다 . 이동 궤적 히 스토리 정보는 위치 정보가 아닌 앵커로부터 수집한 거리 측정치 로서 슬라이딩 윈도우 방식으로 인공신경망에 입력된다 .
해당 방식은 사용자의 이동 특성의 한계상 일정 속도 이하의 속도로만 이동이 가능하고 또한 급격한 이동이 발생할 가능성 은 매우 낮으므로 특정 시점에서 사용자의 궤적을 보면 현재 발생한 멀티 모달 위치 해에서 참 위치를 식별하는 것이 가능 해진다 . 또한 사용자의 궤적 히스토리를 이용하는 방법은 가시 앵커가 전혀 존재하지 않는 상황에도 기존의 이동 궤적을 바탕 으로 제한된 수준의 이동 궤적을 추정해 낼 수 있어 가용성을 향상시킬 수 있다 .
실내 공간의 이동 중에는 특정 시점에서 관측되는 앵커의 수 가 계속 변화하게 된다 . 이러한 이유로 입력 노드(input node) 의 차원 (dimension)이 계속 변화하게 되는 문제가 있다. 입력 노드의 차원 변화는 전체 인공신경망의 구조 변화를 가져오기 때문에 대응이 어려운 문제가 있다. 본 연구에서는 입력 노드 차원의 변화에 대응하기 위해 최악의 경우를 가정하여 대상 공 간에 존재하는 모든 앵커가 동시에 보인다는 가정에서 입력 노 드의 차원을 추정하였다 . 대상 시점에서 관측되지 않는 앵커의 입력은 실제 측정치에서 발생하지 않을 특정 숫자로 세팅하여 학습을 통해 걸러 낼 수 있도록 하였다.
사용자의 이동 궤적은 과거 이동해온 거리 측정치의 히스토 리를 가지고 표현하며 , 구체적인 입력 노드의 구성은 그림 6과 같다. R은 거리 측정치를 말하며, n은 앵커의 고유번호를 의미 하고, m은 윈도우 번호를 의미한다. 입력 노드는 m개의 윈도우 크기(window size)와 n개의 앵커 개수를 곱하여 총 m*n개로 구성된다.
3-3 인공신경망 구성
제안하는 인공신경망은 일반적인 인공신경망 구조와 동일하
…
𝑹𝟏𝟏 𝑹𝟐𝟏 … 𝑹𝒏 𝟏𝟏 𝑹𝒏𝟏 𝑹𝟏𝒎 𝑹𝟐𝒎 … 𝑹𝒏 𝟏𝒎 𝑹𝒏𝒎
n Anchor
m History
그림
6. 인공신경망의 입력 노드 구성 Fig. 6. Input node configuration of ANN.
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
51 52 53 54 55 56 57 58 59 60
61 62 63 64 65 66 67 68 69 70
71 72 73 74 75 76 77 78 79 80
그림
5. 그리드 방식의 위치 정보 표현
Fig. 5. ANN based location representation.
며 입력층(input layer), 은닉층(hidden layer), 출력층(output layer)으로 구성되어 있다[11]. 그림 7은 본 연구에서 구성한 인 공신경망의 구성을 나타낸 것이다. 입력 노드는 m*n개로 구성 되어 있으며, 출력 노드는 그리드 인덱스를 출력하기 때문에 그리드의 개수인 i개로 구성되어 있다. 은닉층은 인공신경망을 학습시킬 때 추정된다.
인공신경망의 구성과 학습에는 KERAS를 이용하였으며, TensorFlow를 Backend로 이용하였다. 입력층의 활성화 함수
그림
8. 학습 데이터 획득을 위한 앵커, 태그, 그리고 관성
측정장치 (위부터 차례대로)Fig. 8. Anchor, Tag, and IMU for acquiring learning data
(from top to bottom).는 ReLU (rectifier linear unit)을 사용하였고, 출력층은 Softmax를 이용하였다. 학습 과정에서 최적화 방법은 Adam (adaptive moment estimation)을 이용하였다[12].
Ⅳ. 인공신경망 학습
4-1 학습 데이터 획득 방법
실제 인공신경망을 이용한 위치 추정 시에는 앵커와의 거리 측정치만이 사용되나 학습 데이터 생성을 위해서는 정확한 궤 적 생성 및 앵커가 관측되지 않는 지역에서도 학습 정보를 제 공하기 위해 보행 항법과 앵커를 이용한 거리 측정치를 모두 이용하였다[3]. 그림 8은 학습에 이용한 초광대역통신 (UWB;
Ultra Wideband) 기반 앵커 및 태그와 관성 측정장치 (IMU;
inertial measurement unit)이며, 주요 사양은 표 1, 2와 같다.
4-2 학습 데이터를 이용한 인공신경망 학습
실내 위치 추정을 위한 인공신경망은 기본적으로 지도 학습 (supervised learning) 방법을 이용하여 학습을 진행하였으며,
…
Hidden Layer Output Layer Input Layer
… 𝑹𝟏𝟏 𝑹𝟐𝟏
𝑹𝒏 𝟏𝟏 𝑹𝒏𝟏
𝑹𝟏𝒎 𝑹𝟐𝒎
𝑹𝒏 𝟏𝒎 𝑹𝒏𝒎
… …
n
m
m*n i
그림
7. 인공신경망 구성 Fig. 7. ANN configuration.
Radio communication Ultra Wideband radio Data rates 110 kbit/s, 850 kbit/s, 6.8 Mbit/s Center frequencies 3.5 GHz ~ 6.5 GHz
Packet size up to 1023 bytes
Ranging protocol Two-way ranging
표
1. 앵커와 태그 장비의 DW1000 칩 모델 세부 사양[13]
Table 1. DW1000 chip model specifications for anchor
and tag [13].Roll/pitch Static 0.2 ° Roll/pitch Dynamic 0.5 ° Yaw in homogeneous magnetic
1.0 ° field
Gyroscope Standard full range 450 °/s Gyroscope Initial bias error 0.2 °/s Accelerometer Standard full range 200 m/s^2 Accelerometer Initial bias error 0.05 m/s^2 Magnetometer Standard full range +/- 8 Gauss Magnetometer Total RMS noise 0.5 mGauss
표 2. 관성 측정장치의 MTi-30 AHRS 모델 세부 사양[14]Table 2. MTi-30 AHRS model specifications for IMU[14].
수집한 학습 데이터를 이용하여 인공신경망을 학습시키기 위 해 다음과 같이 학습을 수행하였다. 우선 학습 데이터는 인공 신경망의 출력층과 매칭시키기 위해 좌표에 따라 그리드 인덱 스로 변환되었다. 입력되는 정보는 앵커의 측정 정보 히스토리 이기 때문에 각 윈도우의 대푯값은 제일 마지막 측정치가 들어 온 시점의 그리드 인덱스가 된다. 학습 알고리즘에서는 입력된 거리 측정치의 히스토리와 인공신경망의 가중치를 이용하여 현재의 그리드를 추정해 내고, 이때 기준 궤적에서 생성된 그 리드 인덱스의 오차를 비교하여 인공신경망의 가중치를 갱신 한다. 그림 9는 인공신경망 학습 과정을 나타낸 것이다.
Ⅴ. 인공신경망 기반 실내 위치 추정 성능 평가
5-1 성능 평가 환경
학습된 인공신경망을 이용한 실내 위치 추정을 위해 다음과 같은 실험 환경을 구성하였다. 실험 환경은 전파 투과가 되지 않는 철근 콘크리트 건물로 위성 항법이 불가하고 벽체의 전파 투과율이 낮아 가시선이 보장되지 않으면 앵커의 신호를 받기 어려운 건물이다. 성능 평가에 사용된 건물의 내 외관은 그림 10과 같다.
성능 평가는 크게 두 단계로 나뉜다. 첫째로 학습 데이터를 획득하여 인공신경망 모델을 학습하는 단계이다. 학습 데이터 를 획득하기 위해서는 앞서 설명했다시피 인공신경망 모델을 생성해야하므로 정확한 위치 정보가 필요하다 . 이 때문에 앵커 와 휴대 수신기간 거리 측정이 가능한 단말과 함께 관성 측정장 치를 휴대하여 정확한 위치 정보를 획득하였다. 두 번째로 인공 신경망 모델로 실제 위치 추정을 수행하는 단계이다 . 이 단계에 서는 학습 데이터 생성 시와는 달리 보행 항법을 사용하지 않으 며 거리 측정이 가능한 단말 만을 휴대하였다.
5-2 성능 평가 시나리오
본 논문에서 제안하는 인공신경망 기반 실내 위치 추정 방법 을 평가하기 위해 다양한 상황에서 성능 평가를 수행하였다. 첫 번째는 일반적인 상황인 복도를 걷는 상황이고, 두 번째는 앵커
를 설치하지 않는 사무실을 선택하여 해당 사무실에 들어가면 서 거리 측정치를 획득하지 못하도록 하였다. 그림 11은 실제 성능 평가 건물 내에 앵커를 설치한 배치도이다 .
5-3 성능 평가 결과
다음 결과는 앵커가 존재하는 환경에서 걷는 경우와 앵커가 없는 환경에 진입하는 경우에서 각각 인공신경망 학습에 관한
ANN Range Measurement
History
Grid Index (True) Grid Index (Estimated)
Error Learning Algorithm
Corrected Weight
Training Data
그림
9. 인공신경망 학습 방법 Fig. 9. ANN learning method.
그림
10. 성능 평가를 실시한 실제 건물의 내․외관 모습 Fig. 10. Interior and exterior views of actual building
where performance was evaluated.
그림
11. 성능 평가를 위한 건물 내 앵커의 배치도
Fig. 11. Anchor layout in the building for performance
evaluation.결과 및 위치가 표시되는 결과를 나타내며 , 그림 10에 나타낸 배치도 위에 평방 4m의 그리드로 구성하여 나타낸 그리드 맵 위에 나타냈다.
5-3-1 앵커가 존재하는 공간에서 걷는 경우
그림 11에서 나타내는 건물의 L자형 복도를 반복적으로 걸 어 학습 데이터를 획득한 후 제안하는 인공신경망 모델에 학습 을 시켰다. 인공신경망 모델의 구조는 윈도우 크기를 30으로 하 여 입력 노드를 구성하였고, 은닉 노드(hidden node)와 은닉층 을 각각 200, 10으로 설정하였다. 학습을 위한 배치 사이즈 (batch size)와 에폭(epoch)은 각각 100, 100으로 설정하였다 [11]. 이때 학습 성공률(success)은 약 96.32%로 확인되었다. 검 증을 위해 완벽히 다른 세션의 데이터로 검증을 수행한 결과에 서도 약 90% 이상의 성공률을 보임을 확인하였다.
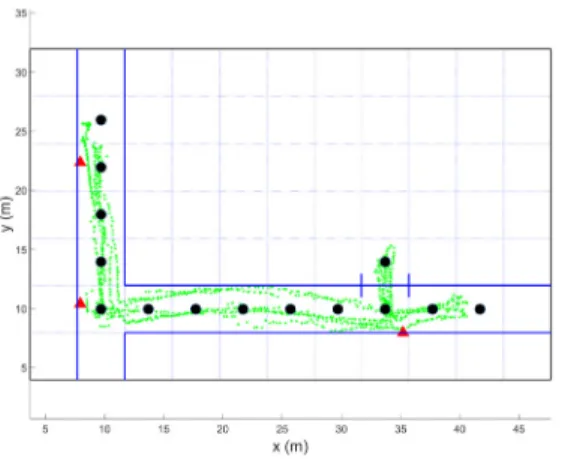
그림 12는 학습을 진행했던 L자형 복도와 동일한 환경에서 인공신경망 기반 위치 추정 궤적 결과와 앵커 및 태그와 관성 측정장치를 사용해서 획득한 기준 궤적 결과를 비교한 그림으 로서 녹색 점들은 앵커 및 태그와 관성 측정장치로 획득한 결과 를 나타내고 검은 점들은 인공신경망 기반 위치 추정의 결과를 나타낸다. 두 궤적 결과는 동일한 경향을 나타냄을 확인할 수 있다.
5-3-2 앵커가 존재하지 않는 공간에 출입하는 경우
이번 실험은 앞선 실험과 동일한 복도를 걷는 중에 앵커가 존재하지 않는 공간에 출입하면서 학습 데이터를 획득 후 인공 신경망 모델을 학습시켰다 . 인공신경망 모델의 구조와 설정값 은 앞선 학습 방법과 동일하게 설정하였고, 이때 학습 성공률은 94.11%로 확인되었다. 검증을 위해 완벽히 다른 세션의 데이터 로 검증을 수행한 결과에서도 90% 이상의 성공률을 보임을 확 인하였다.
그림 13은 학습을 진행했던 동일한 환경에서 인공신경망 기 반 위치 추정 궤적 결과와 앵커 및 태그와 관성 측정장치를 사 용해서 획득한 기준 결과를 비교한 그림으로서 녹색 점들은 앵 커 및 태그와 관성 측정장치로 획득한 결과이고, 검은 점들은 인공신경망 기반 위치 추정의 결과를 나타낸다. 이 결과 또한, 동일한 경향을 나타냄을 확인할 수 있다. 그리고 앞선 실험과는 달리 사용자가 앵커가 존재하지 않는 공간에 들어가면 거리 측 정치를 확보할 수가 없었다. 대신에 인공신경망으로 확보한 사 용자 이동 패턴을 이용해 앵커가 존재하지 않는 실내 공간에서 도 사용자의 위치를 판별할 수 있음을 확인할 수 있다.
Ⅵ. 결 론
복도와 모퉁이로 구성된 일반적인 실내 구조상 충분한 수의 가시 앵커를 확보하기가 어려워 멀티 모달 솔루션이 빈번히 발 생한다 . 본 논문은 이러한 문제를 해결하기 위해 인공신경망을 적용하였다 .
인공신경망을 사용하기 위해 사전에 반복적인 이동으로 거 리 측정치를 축적하고 , 축적한 거리 측정치와 기준 궤적을 이용 하여 인공신경망의 학습을 수행하였다. 학습된 인공신경망은 거리 측정치의 히스토리를 이용하여 현재 시점의 위치를 추정
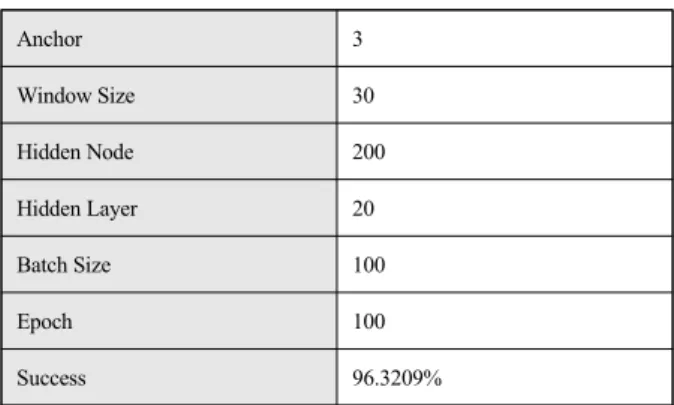
Anchor 3
Window Size 30
Hidden Node 200
Hidden Layer 20
Batch Size 100
Epoch 100
Success 96.3209%
표
3. 복도를 걸을 때 학습 결과
Table 3. Learning result when walking the hallway.
그림
12. 복도를 걸었을 때 인공신경망기반 위치 추정 결과 Fig. 12. ANN based location estimation result when
walking the hallway.
Anchor 3
Window Size 30
Hidden Node 200
Hidden Layer 20
Batch Size 100
Epoch 100
Success 94.1131%
표
4. 앵커가 존재하지 않는 공간에 출입할 때 학습 결과 Table 4. Learning result when entering a space where
anchor does not exist.
해 내며, 이러한 방법은 앵커의 수가 부족하여 멀티 모달 솔루 션이 발생할 때도 과거의 이동 패턴을 이용하여 사용자의 위치 를 특정한다.
제안된 방법을 검증하기 위해 실제 건물에서 성능 평가를 수 행하였으며, 기준 궤적과 비교해보았을 때 동일한 궤적을 나타 냈다. 이를 통하여 앵커의 수가 충분치 않은 상황에서도 사용자 의 위치를 추정할 수 있음을 확인하였다.
References
[1] A. Hameed, and H. A, Ahmed, “Survey on indoor positioning applications based on different technologies,” in 2018 12th International Conference on Mathematics, Actuarial Science, Computer Science and Statistics (MACS).
IEEE, Karachi: Pakistan, pp. 1-5, 2018.
[2] C. Laoudias, A. Moreira, S. Kim, S. Lee, L. Wirola, and C.
Fischione, “A survey of enabling technologies for network localization, tracking, and navigation,” IEEE Communi- cations Surveys & Tutorials, Vol. 20, No. 4, pp. 3607-3644, 2018.
[3] S. Chun, J. H. Seo, and M. B. Heo, “A Study of Multiple Model Particle Filter Based Indoor Tracking Method with Limited Number of UWB Anchor”, in 2017 IPNT
Conference, Jeju: Korea, pp.273-276, 2017.
[4] S. Chun, M. B. Heo, and G. W. Nam, “Development and evaluation of integration algorithm for personal indoor tracking system without pre-installed infrastructure”, in Proceedings of ISGNSS 2014 in Conjunction with KGS Conference, Jeju: Korea, pp.21-24, 2014.
[5] S. M. Sharhan, and S. Zickau, “Indoor mapping for location-based policy tooling using bluetooth low Energy beacons,” in 2015 IEEE 11th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Abu Dhabi: United Arab Emirates, pp. 28-36, 2015.
[6] S. Monica and F. Bergenti, “Hybrid indoor localization using WiFi and UWB technologies,” Electronics, Vol. 8, No. 3, p.334, 2019.
[7] J. B. Bullock, M. Chowdhary, D. Rubin, D., Leimer, G., Turetzky, and M. Jarvis, “Continuous indoor positioning using gnss, wi-fi, and mems dead reckoning,” in Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville: TN, pp.2408-2416, 2012.
[8] R. J. Meinhold, and N. D. Singpurwalla, “Understanding the Kalman filter,” The American Statistician, Vol. 37, No. 2, pp. 123-127, 1983.
[9] J. Carpenter, P. Clifford, and P. Fearnhead, “Improved particle filter for nonlinear problems,” IEE Proceedings-Radar, Sonar and Navigation, Vol. 146, No. 1, pp. 2-7, 1999.
[10] A. Doucet, N. D. Freitas, and N. Gordon, Sequential Monte Carlo Methods in Practice, New York: NY, Springer, 2001.
[11] K.Gurney, “An Introduction to Neural Networks”, New York: NY, CRC Press, 1997.
[12] D. P. Kingma, and J. Ba, “Adam: A method for stochastic optimization,” in 2015 3rd International Conference for Learning Representations (ICLR), San diego: CA, arXiv preprint arXiv, 1412.6980, 2015.
[13] Decawave, DW1000 Product Brief, [Internet]. Available:
www.decawave.com/product-documentation
[14] XSENS, MTi User Manual, [Internet]. Available: www.
xsens.com
그림13. 앵커가 없는 공간에 출입할 때 인공신경망기반 위치
추정 결과
Fig. 13. ANN based location estimation result when
entering a space where anchor does not exist.서 재 희 (Jae-Hee Seo)
2016년 6월 ~ 현재 : 한국항공우주연구원 항법기술연구실 연구원 2015년 2월 : 경북대학교 전자공학과 (공학석사)
2013년 2월 : 경북대학교 전자공학과 (공학사)
※ 관심분야 : 실내항법, 위성항법, 실시간 위치 추적 시스템, 자율군집
천 세 범 (Sebum Chun)
2010년 4월 ~ 현재 : 한국항공우주연구원 항법기술연구실 선임연구원 2008년 2월 : 건국대학교 항공우주공학과 (공학박사)
2002년 2월 : 건국대학교 항공우주공학과 (공학석사) 2000년 2월 : 건국대학교 항공우주공학과 (공학사)
※ 관심분야 : 위성항법, 관성항법, 센서퓨전, 비선형 시스템 상태추정
허 문 범 (Moon-Beom Heo)
2005년 10월 ~ 현재 : 한국항공우주연구원 항법기술연구실 책임연구원 2004년 12월 : Illinois Institute of Technology 항공기계공학과 (공학박사) 1997년 12월 : Illinois Institute of Technology 항공기계공학과 (공학석사) 1992년 2월 : 경희대학교 기계공학과 (공학사)
※ 관심분야 : 위성항법, 정밀항법, 항행시스템
![Fig. 1. Example of obtaining movement pattern of indoor user.Ⅰ. 서 론여러 분야에서 개인 위치 추적의 필요성이 높아짐에 따라 다양한 방법을 이용한 위치 추적 기술들이 연구되고 있다[1]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5186507.350295/2.892.458.792.689.1028/obtaining-론여러-분야에서-추적의-필요성이-높아짐에-기술들이-연구되고.webp)
![표 1. 앵커와 태그 장비의 DW1000 칩 모델 세부 사양[13]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5186507.350295/5.892.84.253.570.977/표-앵커와-태그-장비의-dw-모델-세부-사양.webp)