Design of a GCS System Supporting Vision Control of Quadrotor Drones
전체 글
수치

관련 문서
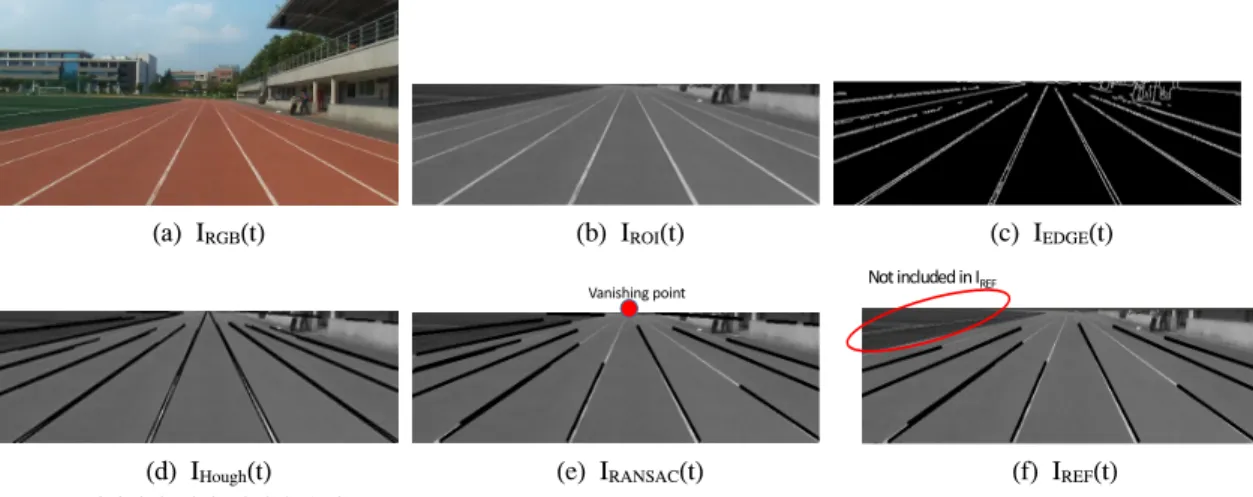
To reduce erroneous detection rate of the other lanes in the lane are detected by the pre- processing to extract the lane boundary line, and recognizes the lane
In this paper, the crack detection algorithm of micro-electro mechanism systems(MEMS) based grid-type sensor is comprehended for detecting micro cracks using
(1) For slip, the crystallographic orientation above and below the slip lane is the same both before and after the deformation; for twinning, there is a reorientation
The proposed algorithm detects the phase of each received signal through the spectral analysis and estimates the direction of the whistle signal by obtaining the phase
For the system development, data collection using Compact Nuclear Simulator, data pre-processing, integrated abnormal diagnosis algorithm, and explanation
In this paper, a methodology for estimating the parameters of non-linear system including stabilizing system(Night Vision Pedestal System) was presented.. To
This section describes the overall structure of the diagnostic algorithm for abnormal situations using ANN. 6 illustrates the functional architecture of the diagnostic
