ISSN 1226-3133 (Print)․ISSN 2288-226X (Online)
Ⅰ. 서 론
저고도 비행체는 RF(Radio Frequency) 추적 시 다중경 로 간섭에 의한 영향을 크게 받으며, 이를 해결하기 위한 여러 기법들이 제안되었으나, 실제 레이더 시스템에 적용 하기엔 많은 제약이 따른다[1]. 레이저의 특성을 이용하면 짧은 펄스폭의 신호를 만들어 거리 해상도를 높일 수 있
고, 좁은 빔 폭을 형성할 수 있어 각도 해상도를 높일 수 있다. 이런 특징을 바탕으로 저고도 비행체의 정확한 시 공간 위치정보 획득을 위해 RF 스킨 추적 방식 대신 레이 저 추적 기법을 연구하였다.
본 논문에서는 레이저 추적기를 이용한 저고도 비행체 의 시공간 위치정보를 획득하는 기법을 다루고 있다. 실 제 비행체 추적 환경 모사의 어려움으로 인해, 비행체를
레이저 추적기를 이용한 저고도 비행체 추적 기법 연구
A Study on the Low Elevation Target Tracking under Multipath
Conditions Using Laser Tracking System
유 승 오 Seung-Oh Yoo
요 약
저고도 비행체는 다중 경로 간섭의 영향으로 인해 계측 레이더의 RF 스킨 추적 시 고각 방향의 오차 신호 증가로 안정적인 추적 데이터를 획득할 수 없다. 이 한계를 극복하고자 본 논문에서는 레이저 추적기를 이용한 저고도 비행체 추적 기법을 제안하였다. 짧은 펄스폭과 좁은 빔 폭을 갖는 레이저의 특성을 이용하여 각도 해상도를 높이는 방법으로 다중 경로 간섭의 영향을 줄일 수 있다. 지면에 설치된 통합형 교정기와 해수면의 표적선을 대상으로 RF 스킨 추적, 비콘 추적, 레이저 추적 결과의 불확도 및 오차 신호 분석을 통해 다중경로 간섭 조건에서 레이저 추적이 RF 스킨 추적 에 비해 추적 성능이 뛰어남을 확인하였다.
Abstract
RF skin tracking of instrumentation RADAR cannot acquire stable track data, because of effect of multipath interference especially elevation direction. In this paper, low altitude target tracking method using laser tracking system is suggested to overcome this restriction. The effect of multipath can be reduced by increasing angle resolution with laser characteristics of very short pulse and narrow beamwidth. RF skin track, beacon track and laser track data for the integrated calibration target on the ground and target ship on the sea are gathered. And they are compared and analyzed to confirm the performance of laser tracking system. As a result, it shows that the suggested laser track method has better performance than RF skin track under multipath conditions.
Key words: Laser Tracker, Low Altitude Track, Low Elevation Track, Multipath Interference, ARMS
국방과학연구소 제8기술연구본부(The 8th Research & Development Institute, Agency for Defense Development, Korea)
․Manuscript received March 30, 2015 ; Revised June 2, 2015 ; Accepted June 5, 2015. (ID No. 20150330-024)
․Corresponding Author: Seung-Oh Yoo (e-mail : [email protected])
대신해 표적선을 이용한 방법을 제안하여, 저고도 목표물 에 대한 레이저 추적의 성능을 확인하였다. Ⅱ장에서는 저고도 추적 환경에서의 RF 추적 성능에 대해 설명하고,
Ⅲ장에서는 저고도 추적 방안에 대해 기술하였다. Ⅳ장에 서는 레이저 추적기 ARMS(Automatic RADAR Multipath Suppression system)를 소개하고, Ⅴ장에서는 통합형 교정 기와 표적선을 대상으로 추적 방식에 따른 추적 성능을 비교, 분석하였다. 끝으로 Ⅵ장에서는 연구수행 결과를 요약하고 향후 연구 방안에 대해 기술하였다.
Ⅱ. 저고도 추적 환경
레이더 추적 성능을 저하시키는 요소로는 크게 추적대 상 자체적인 요소와 외부적인 요소로 나눌 수 있다. 추적 대상 자체적인 요소는 구조적인 특징이나 기동에 의해 발생하며, 진폭 변조, 각도 변조, 극성 변조, 도플러 변조, 펄스 시간 변조 등에 의해 추적 성능을 저하시킨다. 외부 적인 요소는 측정 환경에 의해 발생하며, 다중경로, 누설, 대류권 전파 등이 있다[2].
특히 저고도 비행체는 다중경로에 의한 영향을 크게 받음에 따라 각도 추적 성능이 저하되는 현상이 발생한 다[3]. 다중경로 간섭이란 레이더와 추적 대상의 지리적인 위치 관계로 인해, 추적 대상을 맞고 직접 들어온 에코 (echo) 신호와 지면 또는 해수면을 맞고 돌아온 이미지 (image) 신호가 레이더 수신기에 함께 들어옴으로써 발생 한다. 그림 1은 다중경로 간섭의 지리적인 관계를 나타낸 다[4].
비콘(beacon transponder) 추적 환경을 고려하면, B 지 점의 추적대상에서 발생한 신호는 직접 경로 AB를 통해 A 지점의 레이더 수신기에 도달하게 되고, 그 신호는 식 (1)과 같다.
(1)
첫 번째 지수 항은 수신 신호의 시간 의존성의 의미하 고, 두 번째 항은 직접경로 거리 에 의한 위상 변화를 의미한다. 여기서
는 송신신호의 각주파수이고,
는 그 파장을 의미한다.
그림 1. 다중경로 간섭에 의한 전파 전달 경로 Fig. 1. Geometry for multipath propagation.
(2) 간접 경로 ACB를 통해 수신기에 도달하는 신호는 식 (2)와 같이 간접 경로 거리 에 의한 위상변화를 포함하 며, 지구 표면의 반사율과 거칠기에 따른 지구 반사 계수 에 의한 영향이 진폭
, 위상
로 적용된다. 이 두 신호 는 매우 짧은 시간 간격과 작은 위상차를 가지고 레이더 수신기에 들어오기 때문에, 신호 처리를 통해 두 신호를 구분하기엔 많은 어려움이 따르며, 이는 곧 레이더의 추 적 오차 요인으로 작용한다[5].모노펄스(monopulse) 방식의 경우, 두 개의 수신 신호 가 합(sum) 채널과 차(differential) 채널에 입력되어 차 채 널에 입력된 신호간의 위상차와 크기에 따라 추적 오차 가 결정된다. 합 채널과 차 채널 성분을 이용해 모노펄스 추적 오차를 표현하면 식 (3)과 같다[6].
exp
∆
∆
exp
(3) 여기서
는 직접파와 간섭파 간의 위상차를 나타내며,∆
는 차 채널 직접파,∆
은 차 채널 간접파,
는 합 채널 직접파,
는 합 채널 간접파 성분을 의미한다. 비 콘 추적 환경을 고려하였을 때, 각 성분의 전력 밀도는 식 (4)에서 식 (7)과 같다.
∆
∆
(4)
∆
∆
(5)
(6)
(7)
이 때 는 비콘 송신 전력, 는 비콘 송신 안테나 이득, ∆ 는 차 채널 직접파 레이더 수신 안테나 이득,
∆ 는 차 채널 반사파 레이더 수신 안테나 이득,
는 합 채널 직접파 레이더 수신 안테나 이득, 는 합 채널 반사파 레이더 수신 안테나 이득을 의미한다.
이런 다중경로 간섭에 의한 오차 증가로 인해 바다와 같이 부드러운 표면에 의한 경우에는 고각 추적에 영향 을 미치지만, 땅과 같은 거친 표면의 경우에는 고각뿐 아 니라, 방위각 추적에도 영향을 미치게 된다[2],[3].
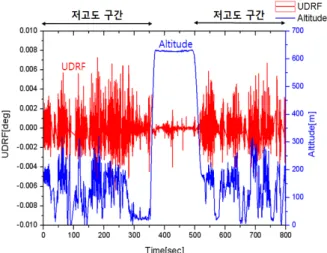
그림 2는 비행체가 고도 200 m 이하를 유지하는 경우, 계측 레이더를 이용한 RF 스킨 추적 결과이며, 고도 데이 터와 고각 추적 오차 신호인 UDRF(Up Down Radio Fre- quency)를 각각 나타내었다.
그림 2. 저고도 비행체의 RF 스킨 추적 결과 Fig. 2. RF skin track result of a low elevation target.
각 구간에서 비행체가 동일 고도를 유지함에도 불구하 고, 저고도 구간에서의 RF 스킨 추적 데이터는 그 외 구 간에 비해 불안정하며 오차 신호가 증가함에 따라 정확 한 고도 정보를 얻어낼 수 없는 것을 확인할 수 있다. 이 로 인해 RF 스킨 추적 시 이미지 표적에 의한 추적 실패 현상이 발생하게 된다.
Ⅲ. 저고도 추적 방안 3-1 RF 추적 방안
계측 레이더는 거리 추적을 위해 펄스 신호를 송, 수신 하며, 각도 추적을 위해 진폭 비교 모노펄스 방식을 사용 하는데 저고도 추적이 아닌 경우, on-axis 추적 기법 등의 활용으로 높은 정확도를 확보할 수 있다[2].
모노펄스 방식의 추적 레이더를 이용한 저고도 추적 방안으로 추적 레이더의 안테나 크기를 키우거나, 주파수 를 높여 빔 폭을 좁게 설계함으로써 각도 해상도를 높이 는 방법이 있으나, 여기에는 기술적인 한계와 물리적인 제약이 따른다. 일반적인 계측 레이더의 반 전력 빔 폭은 약 1 °로 이미지 신호의 수신을 원천적으로 차단하는 것 은 불가능하다[7].
다른 방법으로는 수신 신호의 시간차나 도플러 신호의 차이를 이용해 구분하는 방법이 있으나, 해면에 근접한 시험장의 여건 상 에코 신호와 이미지 신호의 그 차이가 매우 작기 때문에 높은 거리 해상도와 도플러 해상도 특 성을 갖는 추적시스템이 요구된다[8].
물리적인 전파 차단막을 이용한 방법은 레이더와 차단 막의 지리적인 위치를 고려해야 하며, 차단막에 의해 메 인 빔의 가시선 확보가 제한될 수 있고, 근거리에서 반사 될 수 있어 수신단 보호를 고려하면 현실적으로 어려움 이 따른다.
3-2 레이저 추적 방안
저고도 환경에서 RF 추적은 그 한계가 분명히 존재하 며, 이를 극복하고자 레이저 추적기를 이용한 저고도 추 적 기법을 제시하였다. 레이저 추적은 밀리미터파를 이용 하는 레이더와 달리 주로 수
파장의 레이저를 송신 해 추적 대상을 맞고 돌아오는 신호를 탐지해서 추적 대상의 유무, 거리, 방위각, 고각 등의 정보를 얻는 추적 방 법이다. RF에 비해 상대적으로 짧은 파장을 사용함으로 써 각도 해상도를 높일 수 있고, 펄스폭을 좁게 가져갈 수 있어 거리 해상도를 높일 수가 있다. 이러한 특징으로 다 중경로 간섭에서 보다 자유로워 정확한 시공간 위치 정 보를 획득할 수 있다는 장점이 있다.
하지만 구름, 안개 등의 대기 환경에 따라 추적 거리가 수 km 이내로 제한되며, 추적 대상이 둥근 표면으로 되어 있거나, 검정색 계열의 색상인 경우 추적이 어려운 단점 이 있다.
Ⅳ. 레이저 추적기
본 연구에서는 레이저 추적기 ARMS를 그림 3과 같이 계측 레이더의 받침대에 부착하여 RF 추적과 레이저 추 적을 시도하여 시공간 위치정보를 획득하였다.
레이저 추적기의 주요 구성을 그림 4에 나타내었다.
레이저 추적기는 크게 OIA(Optical Instrumentation Ass- embly), 레이저 송신기 제어부, 레이저 프로세서, 레이저 냉각부로 나뉜다. OIA는 레이저 추적기의 핵심으로 레이 저 송신기, 수신기, 감지기 등으로 구성되며, 레이저 송신 기 제어 부는 레이저 송신기, 수신기의 전원 공급기로 구 성된다. 그리고 레이저 프로세서는 계측 레이더의 운영 컴퓨터 및 VME PC와 데이터 통신을 하며, OIA의 송신기 및 수신기를 제어하는 역할을 한다. 레이저 냉각부는 레
그림 3. 계측 레이더와 레이저 추적기 ARMS
Fig. 3. Instrumentation RADAR and laser tracker ARMS.
그림 4. 레이저 추적기의 주요 구성 Fig. 4. Composition of laser tracker ARMS.
이저 송, 수신부가 일정한 온도 조건 하에서 동작되도록 냉각수를 이용해 온도를 낮추는 역할을 한다.
송신기는 ND:YAG 고체 레이저 기반의 구조이며, 적은 열량의 에너지를 순간적으로 한 번에 출력하기 위해 Q- 스위치 방식을 사용한다. ND:YAG를 이용한 플래시 램프 (flash lamp)에서 출력되는 1,064 nm 파장의 레이저는 광 매개 발진기를 촉진시키는 역할을 한다. 광 매개 발진기 는 eye-safe 파장 대역을 사용하기 위해 1,064 nm 파장을 0000 nm 대역으로 변환하며, 변환 시 발생하는 부엽은 여
표 1. 레이저 추적기 ARMS 주요 특성 Table 1. Laser tracker ARMS specification.
항목 사양
정확도 각도 0.00 mil
거리 0 m @ 00 km 탐지 거리 < 00 km(가시거리 00 km 이상,
레이저 반사기 부착 조건)
데이터 율 50 Hz
레이저 타입 고체 레이저(ND: YAG)
파장 0000 nm
펄스 폭 8~10 ns
유효 최대 출력 전력 000 kW(typical), 00 mJ
빔 폭 송신 0.5 mil ~10 mil
범위 내 가변
수신 3 mil
수신기 타입 4 채널 진폭 비교 모노펄스
PRF 50 Hz
파기(filter)를 통해 제거된다. 수신기는 총 4개의 채널로 구성되며, 모노펄스 추적 방식을 사용한다.
Ⅴ. 추적 방식에 따른 저고도 추적 결과 비교 5-1 통합형 교정기 추적 결과
저고도 추적 환경에서 레이저 추적 성능을 확인하기 위 해 통합형 교정기를 이용한 방법을 제안하였다. 통합형 교 정기는 그림 5와 같이 레이저 반사기(retro reflector), 비콘 트랜스폰더(beacon transponder), 코너 리플렉터(corner reflec- tor)를 한 개의 치구에 고정하여 동일한 환경 조건에서 다 양한 추적 방식에 따른 결과를 비교해 볼 수 있도록 제작 하였다. 설치 위치의 고도는 약 00 m이고, 레이더의 고도가 약 000 m 임을 고려하면 저고도 추적 성능 확인이 가능하다.
서로 다른 위치에서 계측한 레이더 추적 자료의 비교 를 위해 단일 계측 레이더 기준으로 데이터를 변환시켜 추적 결과를 비교하였다.
계측 레이더의 추적 원시 자료에는 방위각, 고각, 거리 에 대한 오차 신호를 포함하고 있으며, 그 값은 각각 LRRF(Left Right Radio Frequency), UDRF, IORF(In Out Radio Frequency)로 정의된다. LRRF와 UDRF는 모노펄스 추적 방식에서 계측레이더의 보어싸이트(boresight) 방향 과 표적의 RF 신호 축이 이루는 방위각, 고각 각도 오차 성분을 의미한다. 이 값은 수신기 열잡음, 안테나 빔 폭, 모노펄스 오차 기울기, 서보 엔코더(servo encoder)의 제한
그림 5. 통합형 교정 타겟 Fig. 5. Integrated calibration target.
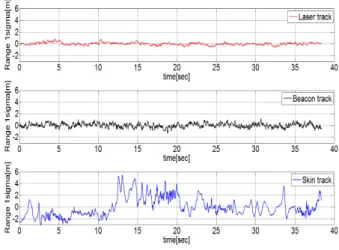
그림 6. 통합형 교정기의 거리 추적 결과
Fig. 6. Range track result of an integrated calibration target.
그림 7. 통합형 교정기의 방위각 추적 결과
Fig. 7. Azimuth track result of integrated calibration target.
적 성능 등의 요인에 의해 100 % 두 축을 맞출 수 없으므 로 잔여 오차 성분에 대한 값이 기록된다[9]. IORF는 추적 거리 게이트(gate)와 표적 신호의 거리 게이트 값 사이의 차이를 의미한다. 따라서 추적 자료와 함께 본 오차신호 를 분석함으로써 레이더의 추적 성능을 파악할 수 있다.
오차 성분이 클수록 추적 결과의 정확도가 떨어짐을 의미하며, 레이저 추적은 비콘 추적과 비슷한 크기의 오 차 신호 성분을 갖는 것을 확인할 수 있다. 레이저 추적 불확도를 기준 1로 하였을 때, 통합형 교정기 추적 불확 도를 표 2에 상대적으로 정리하였다.
불확도란 측정값을 합리적으로 추정한 값의 분산 정도
그림 8. 통합형 교정기의 고각 추적 결과
Fig. 8. Elevation track result of an integrated calibration target.
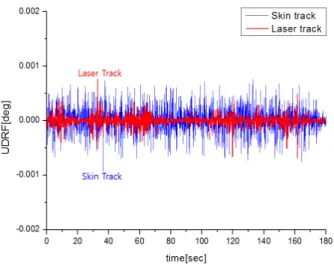
그림 9. 통합형 교정기의 방위각 추적오차
Fig. 9. Azimuth track error of an integrated calibration tar- get.
표 2. 통합형 교정기 추적 불확도
Table 2. Track uncertainty of an integrated calibration tar- get.
추적 방식 불확도[1σ] 비고
거리[m] 방위각[mil] 고각[mil] SNR[dB]
레이저 추적 1 1 1 2.7
비콘 추적 1.5 0.25 2.5 82
RF 스킨 추적 8 2.75 45 65
그림 10. 통합형 교정기의 고각 추적오차
Fig. 10. Elevation track error of an integrated calibration target.
를 나타내는 척도이고, B-type 불확도를 의미하며, 1
오 차 분석을 통해 얻을 수 있다[9]. 본 논문에서는 20 ms 간 격으로 생성되는 데이터를 1초 단위로 이동 윈도우(sli- ding window) 방식을 적용하여 계산하였다. 레이저 추적 결과의 불확도는 비콘 추적과 유사한 추적 결과를 보이 며, RF 스킨 추적 결과에 비해 매우 낮은 불확도를 가지 며 추적이 가능함을 확인할 수 있다.본 시험의 추적 결과는 신호 대 잡음 비(S/N)가 65 dB 이상인 경우이며, 거리가 멀어져 신호 대 잡음비가 낮아 짐에 따라 수신기 열잡음 증가로 인해 각도 오차는 증가 할 수 있다[9]. 또한, 지면에 고정된 교정기를 대상으로 한 추적 결과이기 때문에, 움직이고 있는 추적 대상의 경우, 서보(servo) 대역폭에 의한 응답 속도 등의 외적 요소가 추가되어 추적 성능은 더 저하될 수 있다. 하지만 본 시험 결과로 저고도 추적 대상에 대해 레이저 추적 방식이 RF 스킨 추적 방식에 비해 보다 안정적인 추적이 가능할 뿐 아니라, 불확도와 오차 성분 크기가 작음을 확인하 였다.
5-2 표적선 추적 결과
일반적으로 표적선이나 표적기 등에는 보안과 비용, 무게, 크기 등을 고려해 비콘을 장착하지 않기 때문에 시 험용 표적선 추적 시 비콘 추적은 제외하고, 레이저 추적
그림 11. 레이저 반사기 사진 Fig. 11. A laser retroreflector.
그림 12. 레이저 반사기를 부착한 표적선 Fig. 12. A ship target with a laser retroreflector.
그림 13. 표적선의 방위각 추적오차 Fig. 13. Azimuth track error of a ship target.
그림 14. 표적선의 고각 추적오차
Fig. 14. Elevation track error of a ship target.
그림 15. 표적선의 거리 추적오차 Fig. 15. Range track error of a ship target.
과 RF 스킨 추적 결과를 비교하였다. 기동하는 표적선의 경우, 전반사(total reflection)를 통한 안정적인 추적 환경 조성을 위한 레이저 반사기 부착이 필요하다. 또한, 표적 선은 360° 선회할 수 있기 때문에, 모든 방향에서 레이저 신호를 반사시켜 줄 수 있는 레이저 반사기를 그림 11과 같이 개발하였으며, 그림 12와 같이 표적선 상단에 부착 하였다[10].
레이저 추적 불확도를 기준 1로 하였을 때, 표적선 추
표 3. 표적선 추적 불확도
Table 3. Track uncertainty of a ship target.
추적 방식 불확도[1σ] 비고
거리[m] 방위각[mil] 고각[mil] SNR[dB]
레이저 추적 1 1 1 5
RF 스킨 추적 5 1.5 3.3 65
적 불확도를 표 3에 상대적으로 정리하였다.
표적선은 레이더로부터 거리 약 8 km 떨어진 지점에서 선회하였고, 방위각, 고각, 거리 추적 오차 성분을 분석을 통해 지면에 위치한 통합형 교정기 추적 결과보다 해수 면에 위치한 표적선 추적 시 RF 스킨 추적의 오차가 적음 을 알 수 있다. 이는 통합형 교정기를 건물 옥상에 설치하 여 건물 자체의 반사 신호가 코너 리플렉터에 의한 수신 신호에 비해 크고, 옥상 주변 물체에 의한 간섭이 발생하 지만, 이에 반해 상대적으로 표적선 주변에는 장애물들이 없기 때문이다. 해수면 위로 이동하는 표적선의 경우, RF 스킨 추적 대비 레이저 추적의 오차 성분이 상대적으로 거리 방향으로 80 %, 방위각 방향으로 33 %, 고각 방향으 로 70 % 적으며, 저고도 환경에서 매우 우수한 추적 성능 을 갖는 것을 확인하였다.
Ⅵ. 결 론
본 논문에서는 다중 경로 간섭의 영향을 크게 받는 저 고도 추적 환경에서 레이저 추적 기법의 추적 성능을 RF 스킨 추적과의 비교를 통해 검증하였다. 지면에 설치한 통합형 교정기 추적 시험 결과, 레이저 추적이 RF 스킨 추적에 비해 방위각과 고각 오차 신호가 줄어들며, 비콘 추적과 유사한 성능의 추적 결과를 얻을 수 있었다.
또한 실제 비행체 추적 환경 모사의 어려움으로 표적 선을 이용한 저고도 환경을 조성하여, 추적 결과를 비교 하였다. 표적선의 경우, RF 스킨 추적 대비 레이저 추적 의 오차 성분이 상대적으로 거리 방향으로 80 %, 방위각 방향으로 33 %, 고각 방향으로 70 %가 적으며, 이를 통해 저고도 환경에서 매우 우수한 추적 성능을 갖는 것을 확 인하였다. 표적기 등의 비행체 추적 환경 조성 시, 본 논 문의 시험 결과를 바탕으로 추적 데이터를 획득하여 분 석할 것이다.
추후 초당 레이저 송신 횟수, 레이저 빔 폭, 계측 레이 더의 서보 응답 속도(servo response), 목표물의 횡 방향 속 도 등을 고려한 레이저 추적 알고리즘 연구를 통해, 목표 물 특성에 따라 레이저 빔 폭, 추적 대역폭 등의 파라미터 를 달리 적용할 것이다. 또한, 이를 바탕으로 RF 추적 방 식과 레이저 추적 방식을 함께 운용하기 위한 통합 추적 알고리즘 연구 결과를 바탕으로 두 방식의 장점을 이용 해 추적 모드를 변환하면서 높은 정확도를 갖는 추적 데 이터를 획득할 것이다. 비콘 탑재가 불가능한 추적 대상 이 저고도 비행을 하는 경우, RF 스킨 추적은 그 추적 오 차로 인해 데이터 신뢰성에 한계가 있으며, 낮은 불확도 와 오차 성분을 갖는 추적 데이터 획득에 제안한 레이저 추적 방식이 훌륭한 대안이 되리라 기대한다.
References
[1] William J. Bangs, Joel Bock, and Thomas M. Wagner,
"Monopulse elevation discrimination experiments in low- angle multipath", SPIE Conference on Radar Processing,
Technology and Applications III, vol. SPIE-3462, pp.
136-146, Jul. 1998.
[2] Merrill I. Skolnik, RADAR Handbook, McGraw-Hill, pp.
9.3, 9.27, 9.38, 2008.
[3] Timothy Griesser, Constantine A. Balanis, "Oceanic low- angle monopulse radar tracking errors", IEEE Journal of
Oceanic Engineering, vol. OE-12, no. 1, pp. 289-295,
Jan. 1987.[4] Bassem R. Mahafza, RADAR Systems Analysis and De-
sign Using MATLAB, Chapman & Hall/CRC, pp. 343-
347, 2005.[5] W. D. White, "Low-angle radar tracking in the presence of multipath", IEEE Transactions on Aerospace and El-
ectronic Systems, vol. AES-10, no. 6, pp. 835-852, Nov.
1974.
[6] 예성혁, 류충호, 황규환, 서일환, 김형섭, "계측레이더 추적 시뮬레이터 개발", 한국군사과학기술학회지 제 14(3), pp. 405-413, 2011년 6월.
[7] BAE SYSTEMS, System Technical Documentation TM-
8003310, pp. 4, 2003.
[8] David K. Barton, "Low-angle radar tracking", Procee-
dings of the IEEE, vol. 62, no. 6, pp. 687-704, Jun.
1974.
[9] 류충호, 서일환, 황규환, 예성혁, "계측레이더 정확도
분석", ADDR-514-101055, 2010년.
[10] 유승오, "저고도 비행체 추적을 위한 레이저 반사기 개발", ADDR-514-142702, p. 27, 2014년.
유 승 오