얼굴로봇 Buddy의 기능 및 구동 메커니즘
Functions and Driving Mechanisms for Face Robot Buddy
오 경 균1, 장 명 수2, 김 승 종3, 박 신 석4
Oh Kyung-Geune1, Jang Myong-Soo2, Kim Seung-Jong3, Park Shin-Suk4
Abstract The development of a face robot basically targets very natural human-robot interaction (HRI), especially emotional interaction. So does a face robot introduced in this paper, named Buddy.
Since Buddy was developed for a mobile service robot, it doesn’t have a living-being like face such as human’s or animal’s, but a typically robot-like face with hard skin, which maybe suitable for mass production. Besides, its structure and mechanism should be simple and its production cost also should be low enough. This paper introduces the mechanisms and functions of mobile face robot named Buddy which can take on natural and precise facial expressions and make dynamic gestures driven by one laptop PC. Buddy also can perform lip-sync, eye-contact, face-tracking for lifelike interaction. By adopting a customized emotional reaction decision model, Buddy can create own personality, emotion and motive using various sensor data input. Based on this model, Buddy can interact probably with users and perform real-time learning using personality factors. The interaction performance of Buddy is successfully demonstrated by experiments and simulations.
Emotional Expression, Emotional Reaction Decision Model, Face Robot, Lip-sync
1. 서 론
인간의 얼굴은 주체의 감정을 나타내는 표정이 나타 나는 곳으로서 강력한 커뮤니케이션 수단 중 하나이다.
표정은 사전적 의미로 ‘마음 속에 품은 감정이나 정서 따위의 심리상태가 겉으로 드러남 혹은 그런 모습’을 말하는데, 보통 사람은 표정을 통해 언어보다 더 빠르 고 정확하게 상대의 감정을 이해하거나 혹은 자신의 반 응을 표출할 수 있다. 최근 학계에서는 사람의 표정이 국가나 인종에 상관없이 보편적이라는 사실을 인정하고 있으며, 이는 얼굴 표정이 누구에게나 공통된 감정 정 보를 제공할 수 있다는 점을 시사한다.[1] 그러므로 커뮤 니케이션 수단으로서의 얼굴 로봇은 인간로봇 상호작용 (HRI)기술에 있어 중요한 역할을 수행할 수 있다.
한편 최근 지능형 서비스 로봇에 대한 수요가 증가하 면서 주어진 명령만을 수행하는 단순한 기능의 서비스
로봇이 아닌 인간과 감정을 교류할 수 있는 동반자 개 념의 사회 로봇에 대한 연구가 활발해지고 있다. 각종 센서를 통해 사용자의 의도, 감정 등을 포함한 외부 환 경을 인지하고 해당 데이터를 바탕으로 스스로의 감정 및 행동을 생성하며, 이를 효과적으로 표현할 수 있는 얼굴 로봇에 대한 연구가 주목받는 이유이다. 이는 단 순히 로봇의 인지 능력 향상에 초점을 맞추어 로봇다운 로봇을 만드는데 초점을 맞추어 왔던 기존의 연구들과 차별되는 연구로서, 보다 더 생물체같은 로봇을 개발하 려는 노력의 일환이라고 할 수 있다.
하지만 지금까지 개발된 얼굴 로봇들은 주로 연구 목 적으로 제작되어 기능면에서는 뛰어난 성능을 가지고 있지만 전체 시스템이 거대하고 제작 비용이 과도하여 다른 시스템과의 결합은 물론 독자적인 구동을 통한 상 용화 역시 어려운 사례가 많았다.
예를 들어, 인간의 학습과정을 연구하기 위해 제작된 Kismet(Breazeal, MIT AI Lab)[2]의 경우에는 로봇 자체의 무게가 4.5~7.5kg이며, 사용된 PC의 수가 16대이다. 또 하나의 대표적인 휴머노이드 WE-4RⅡ(Takanishi, Waseda Univ.)[3]의 경우에도 얼굴 무게가 목을 포함해 11kg 이 상이므로 그 자체로서 다소 무겁고 비대하다.
※ 본 연구는 지식경제부 인간기능 생활지원 지능로봇 사업의 일환 으로 수행되었음.
1 한국과학기술연구원 연구원
2 한국과학기술연구원 학생연구원
3 책임 저자 : 한국과학기술연구원 책임 연구원
4 고려대학교 기계공학부 교수
이에 본 논문에서는 환경 인식, 감정 생성 및 자연스 러운 표정 구현, TTS 기반 립싱크 등의 기능을 원활하 게 수행하면서도, 한 대의 PC로 구동 가능한 모바일 얼 굴로봇 Buddy를 개발하였다. Buddy는 사용자나 사물까 지의 거리, 큰 소리, 밝은 빛을 인지할 수 있으며, 시야 에 있는 사람 얼굴을 추적한다. 또한 이와 같은 입력은 내부 감성 반응 결정 모델에 그 빈도, 강도 및 히스토리 가 반영되어 스스로의 동기, 감정을 생성한다. 이를 통 해 Buddy는 해당 상황에 대한 개연성 있는 대응을 생성 하고 이를 얼굴 표정 및 제스쳐로써 외부에 표출한다.
특히 TTS를 통한 립싱크 기능은 상황에 적절한 발화로 감정 교류 기능을 보완한다.
2. 시스템 개요
Buddy는 별도의 외형 케이스가 없는 마스코트 타입 의 얼굴 로봇으로서, 얼굴의 전체 형태를 형성하는 프 레임 상에 구동 기구부, 센서부가 장착되어 있다. 또한 최상층 프레임에 스텝 모터 드라이버가 위치하여 개별 구성부 자체가 전체적인 얼굴 외관을 형성하고 있다.
(그림 1)
그림 2에 도시된 바와 같이 전체 얼굴부는 PC에 설 치된 델파이 기반 사용자 인터페이스 프로그램과의 시 리얼 통신을 통해 제어되며, 이를 통해 얼굴부의 센서, 엑츄에이터 상태가 모니터링되고 구동 명령이 전달된다.
또한 소프트웨어상에 내재된 감성 반응 결정 모델에 센 서를 통해 인식한 외부 자극의 내용, 순서, 강도, 빈도 정보를 반영되어 Buddy의 반사행동, 감정, 동기, 행동 등이 결정된다. PC와 얼굴부 사이에는 인터페이스 보드
그림 1. Buddy의 외관
그림 2. 시스템 레이아웃
가 위치하여 얼굴부에 전원을 공급함과 동시에 AVR atmega 128을 이용하여 센서정보를 PC에 패킷으로 전달 한다.
목을 포함한 전체 얼굴부는 195 x 320 x 200mm의 크기 에 2.2kg의 무게로 구현되었으며, 개발에 사용한 PC는 펜티엄 4 M 1.80GHz CPU와 787MHz 1GB RAM으로 구 성된 랩탑이다.
3. 구동 메커니즘
구동부는 크게 눈썹, 눈꺼풀, 눈동자를 포함하는 안구 부와 입술, 목의 3부분으로 나뉘어져 있다. 목은 얼굴 전체를 구동하기 위해 강한 토크를 발생하는 RC서보 모터 2기를 사용하였으며, 나머지 구동부에는 경량, 저 소음을 구현하기 위해 소형 하이브리드 스텝모터 13기 를 사용하였다. 특히 하이브리드 스텝모터의 경우 각2 개의 모터 제어가 가능한 드라이버(TMS320LF2406 PZACA코어) 6기를 제작하여 제어에 사용하였고, 해당 드라이버는 얼굴부에 장착되어 있다.
구동부의 종류와 자유도 선정은 사람의 감정을 표정 을 통해 읽어내는 방법에 사용되는 얼굴요소와 그 움직 임을 추출하여 감정 표현에 주요하게 사용되는 요소들 을 기준으로 간략화하여 구동부를 편성하였다. 따라서 일부의 세부 감정 표현을 제외하고는 명확하고 다양한 감정 표현이 가능한 수준에서 시스템을 간략하게 구성 하였다.
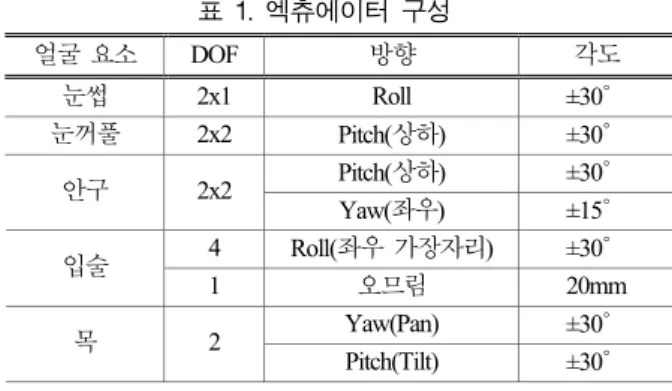
그 결과 추출된 얼굴요소의 종류와 해당 요소의 구동 자유도 및 동작범위는 표 1과 같다.
표 1. 엑츄에이터 구성
얼굴 요소 DOF 방향 각도
눈썹 2x1 Roll ±30°
눈꺼풀 2x2 Pitch(상하) ±30°
Pitch(상하) ±30°
안구 2x2
Yaw(좌우) ±15°
4 Roll(좌우 가장자리) ±30°
입술 1 오므림 20mm
Yaw(Pan) ±30°
목 2
Pitch(Tilt) ±30°
3.1 안구부
안구부는 그림 3에서 보는 바와 같이 크게 눈썹, 눈 꺼풀, 안구의 3부분으로 나뉘어 좌우 대칭으로 한 쌍씩 배치되어 있다. 해당 얼굴 요소들은 사람의 얼굴에 비 해 전체적으로 과장된 크기를 가지고 있는데 이것은 코, 피부가 없는 얼굴 공간의 공백을 보완하면서 표정을 보 다 효과적으로 전달하기 위함이다.
눈썹의 경우 연장된 모터축과 직결되어 간단한 좌우 회전 구동(roll)을 할 수 있다. 반면 눈꺼풀은 구동공간 제약 극복 및 감속 효과 발생을 위해 4절 링크를 사용 하여 상하 방향 회전 구동(pitch)을 한다. 안구의 경우에 도 추후 안구 내부에 카메라를 장착할 공간을 확보하기 위해 yaw, pitch에 대하여 모두 곡선 4절 링크를 이용해 2자유도 구동을 가능하게 하였다.
그림 3. 안구 구동부
3.2 입술
입술은 감정표현에서 중요한 역할을 수행하며 입술을 통해 립싱크를 수행하므로 보다 자연스럽고 동적인 동 작을 구현하기 위해 그림 4와 같이 5자유도를 갖는 구 조로 설계하였다.
좌우 상하 대칭구조로 4개의 모터와 기어박스를 배치 하여 위아래 입술 꼬리의 회전을 구동하고, 상하입술을 동시에 수평방향으로 오므리기 위해 랙앤피니언 기어를 배치하였다. 입술 오므림은 단순히 입을 벌리고 닫는 동작 이외에 ㅗ, ㅜ 등의 입모양을 표현할 수 있도록 하
며, 나머지 모터의 부족한 토크를 보강한다.
립싱크 모양은 한국어 교육자료(4)의 입술모양을 기초 로 사람과 유사하게 설정되었으나 좌우 비대칭 동작인 물결모양의 입술 등 사람과는 다른 캐릭터적인 표현이 가능하다.
그림 4. 입술 구동부
3.3 목
사람의 목은 작고 납작한 여러 개의 뼈로 구성되어 그 자유도가 상당하다. 하지만 모터를 이용해 제한된 공간에서 강한 강성을 가지는 구조물을 설계하려면 자 유도의 제한이 불가피하다. 따라서 목은 핵심 기능을 구현함에 있어 필수적인 자유도만을 선택하고 설계해야 만 한다. 또한 서비스로봇의 경우 일반적으로 목이 없 거나 길지 않으므로 전체적으로 높이를 낮추는 구조를 채택하였다.(그림 5)
따라서 목은 기본적인 감정 표현이 가능하면서도 사 람의 얼굴 추적이 가능한 수준으로 설계되어 pan (yaw), tilt(pitch)의 2자유도를 가진다. Roll 자유도는 의구심을 표현하거나, 즐거움을 표현하는 일부 제스쳐 등을 제외 하고는 감정 표현과 연관성이 상대적으로 작으며 얼굴 추적기능과 무관하므로 표현 기능 손실의 최소화 측면 에서 제외되었다. Tilt구동은 토크 증가를 위해 감속기어 로 작동되며, pan의 경우에도 외접기어를 통하여 감속비 를 부여하였다.
그림 5. 목 구동부
4. 센싱 메커니즘
Buddy는 각 1기의 총 4가지의 센서로부터 거리(초음 파 센서), 큰소리(마이크), 강한 빛(조도 센서), 사용자의 얼굴 위치(웹캠)에 대한 정보를 얻는다. 기본적으로 웹 캠을 제외한 다른 센서들은 센서의 출력 신호가 인터페 이스 보드에서 모아진 후, 데이터가 패킷화되어 50msec 마다 시리얼통신으로 PC에 전달되는 방식을 사용한다.
반면 웹캠의 경우에는 USB 2.0 으로 PC에 영상 정보만 을 전달한 뒤 PC에서 사용자 얼굴의 중심 좌표를 산출 한다.
AVR 인터페이스 보드에서 작성되는 패킷의 크기는 5 byte로 사용자와의 거리 및 접근 속도, 역치 이상의 강 한 빛 유무, 역치 이상의 큰소리 유무 등의 정보가 담겨 있다.
사용된 센서의 특징과 성능은 표 2과 같다.
표 2. 센서 사양
센서종류 유형 인식범위 민감도
마이크 Omni-
directional
110dB
(THD3%) 461V/μbar 조도센서 Silicon PDA 1130
μW/cm2 532Hz 웹캠 USB2.0 640x480
pixel 30fps 초음파센서 송수신부
분리형 3cm~3m 1V/μbar
5. 감성 반응 결정 모델
감성 반응 결정 모델은 외부 환경 정보를 분류, 분석 하여 로봇의 주변 상황을 총체적으로 평가함으로써 로 봇의 상황 대응 능력을 향상시킨다. 또한 로봇의 감성 요소 히스토리를 관리하여 단순 반사적인 행동을 최소 화하고 동일한 자극에 대하여서도 상황에 따라 상이한 반응을 보임으로써 보다 더 인간다운 행동 구현이 가능 하게 한다.
로봇의 감성시스템과 관련하여 Yu는 감정과 동적인 성격에 기반한 감성 행동 결정 모델을 제안하여 지속적 으로 가해지는 외부 입력에 대응해 주변 환경에 적합한 감성행동을 도출해 내는 시스템을 시뮬레이션으로 구현 하였다.(5) 이 모델은 심리학적 연구결과를 바탕으로 로 봇의 내부 상태, 감정, 성격, 동기, 행동 등을 정의하고 이들의 역할, 특성 및 변화를 동역학 방정식으로 체계 화하였다.
특히 성격 심리학의 다양한 이론들의 접근 방식인 정 신분석적 전략, 표상적 전략, 성향적 전략, 환경적 전략
중 성향적 전략과 환경적 전략을 채택함으로써 로봇의 상황에 적합한 모델을 구축하였다. 성향적 전략은 성격 의 기초가 되는 중요한 성향들을 확인하고 각 특질들을 명확히 설명하는데 초점을 두는 접근으로 로봇의 성격 을 변수화하고 수치화하기에 적합하다. 반면 환경적 전 략은 성격이 주체에게 영향을 주는 다양한 외적 조건과 환경의 영향에 의해 형성된다는 가정하에 환경이 성격 형성에 영향을 주는 과정에 중심을 두고 있어 한정된 센서를 기반으로 외부 정보를 인지하여 감정을 생성하 는 로봇 환경에 적용이 용이하다.
전체 모델은 기본적으로 내부상태, 감정 및 성격의 변화를 나타내는 3개의 상태 방정식과 동기와 행동의 결정을 보여주는 두 개의 출력 방정식으로 정의되며 전 체 구조 및 데이터 흐름은 그림 6에서 도식화하였다.
Internal state dynamic equation
xis[k+1] = Ais·xis[k] + fis(uex[k], ymo[k-1]) (1) Emotion dynamic equation
xem[k+1] = Aem∙ xem[k]
+ B1em(xpe[k])∙ B2em(xis[k])∙ uex[k]
+ B1em(xpe[k])∙ fem(uin[k]) (2) Personality dynamic equation
xpe[k+1] = Ape[k]∙ xpe[k]
+fpe(xem[k],xpe[k],uin[k],uex[k]) (3) Motive output dynamic equation
ymo[k] = fmo(xem[k],xpe[k],uin[k],uex[k]) (4) Behavior decision output dynamic equation
ybe[k] = fbe(ymo[k],xpe[k]) (5) xis로 표현되는 로봇의 내부 상태는 이전 내부상태값 에 내부상태 변화를 나타내는 함수 fis값을 더하여 결정 되는데, 이때 fis는 외부 자극 uex와 현재 동기에 의해 결 정된다. Ais는 행렬의 덧셈이 가능하도록 행렬의 차원을 맞춰주기 위한 단위행렬이다. 따라서 내부 상태의 변화 가 없는 경우 이전의 내부 상태값은 그래도 현재에 유 지된다. 감정 동역학 방적식은 현재의 감정 상태를 나 타내는 상태 벡터 xem과 내부 자극 uin, 그리고 시스템의 동역학 특성을 나타내는 시스템 행렬 B1em, B2em, fem으로 구성된다. 특히 B1em 은 성격 특성이 감정의 변화에 미 치는 영향을, B2em은 외부자극에 의해 발생하는 감정의 변화를 나타내는 행렬이다. fem은 내부자극에 의해 발생 하는 감정의 변화를 나타내는 비선형 함수이다.
성격 xpe를 결정하는 성격 동역학 방정식의 특성은 비 선형 함수 fpe로 결정되며 감정, 현재 성격, 내부 자극,
외부 자극을 이용하여 성격의 변화를 유도한다.
동기 출력 방정식은 출력 동기를 결정하는 비선형함 수 fmo를 통해 내외부 동기를 출력하며 fmo는 내부 자극, 외부 자극, 감정 상태에 따라 다양한 동기를 발생시킬 수 있다. 행동 결정 출력 방정식은 최종 동기를 어떻게 행동으로 표현할 것인가를 결정하는 식으로, 그 기준을 xpe의 성분인 외향성 xpe3로 사용한다.
Yu의 모델은 기존 감성시스템의 나열식 구조를 탈피 하여 시스템 변화에 따른 개선이 용이하며, 기존 모델 들에 비해 행동 결정 과정에서의 심리학적 연구 결과 도입이 두드러지는 장점을 가지고 있다. 하지만 해당 모델은 하드웨어 시스템과 연동되지 않는 시뮬레이션 상태로 개발되어 외부 환경 변화를 인위적으로 입력받 아 사용하며 이에 대한 행동 출력 역시 수치적으로만 산출되는 한계를 가지고 있다.
이에 저자들은 Buddy시스템의 상황에 맞도록 모델의 입출력 구조를 수정하고, 이에 대하여 시간 요소를 삽 입하고 반사행동 등의 요소들을 추가함으로써 상호작용 의 개연성을 보완하였다.
입력과 관련하여서는 시뮬레이터가 아닌 실제 센서로 입력받을 수 있는 자극들을 토대로 입력 신호를 재구성 하였고, 동시 자극 입력 또한 가능하게 하였다. 또한 감 정의 변화가 자극 입력시에만 이루어지는 대신에 시간 에 흐름에 따라서도 감정의 변화가 이루어지도록 시간 요소를 삽입하여 실제 구동시에 개연성을 구현하였다.
출력 역시 실제 로봇에서 구현된 요소들을 감정 표현의 수단으로 편성하여 반사 행동과 같은 새로운 요소를 추 가하는 등 감정 모델 전반의 동역학식을 재편하였다.
그림 6. 감정 반응 결정 모델
5.1 외부 자극 인지(입력)
장착된 센서를 통해 식별할 수 있는 자극 중 감정 형 성에 사용할 수 있는 자극은 사람 얼굴의 출현, 사람 얼 굴 위치 변화, 느린 접근, 빠른 접근, 강한 빛, 큰 소리
로 분류하였고 일부 자극은 자극의 강도나 일정 시간 내 출현 빈도 등도 함께 인식하도록 하였다.
표 3과 같이 감성 반응 결정 모델의 특성상 인지된 자극은 크게 긍정적 자극과 부정적 자극으로 나뉘어 인 식되는데 지속적인 얼굴 위치의 변화는 사용자의 관심 표명으로 인지하여 긍정적인 자극으로 분류하였다. 반 면 빠른 접근이나 강한 빛 및 큰 소리는 로봇에게 부정 적인 자극으로서 작용한다. 접근과 인식의 경우에는 이 전 자극에 따라 긍정/부정이 결정되는 자극으로 예를 들어, 이전 입력 자극이 부정 자극일 경우 인지나 접근 은 또 하나의 부정 자극으로 작용한다
표 3. 입력 자극의 종류, 정의 및 평가 자극 종류 의미 정의 자극 평가 사람 얼굴의
지속적 출현 관심 표현 긍정 자극
빠른 접근 놀래킴
밝은 빛 놀래킴
큰소리 놀래킴
부정 자극
접근 긍정이후 : 긍정 부정이후 : 부정
얼굴 인식 긍정이후 : 긍정 부정이후 : 부정
물러남 긍정이후 : 부정 부정이후 : 긍정
이전 자극 종류 의해 긍정/부정
결정
5.2 감정 표현(출력)
5.2.1 표정 표현 및 제스쳐
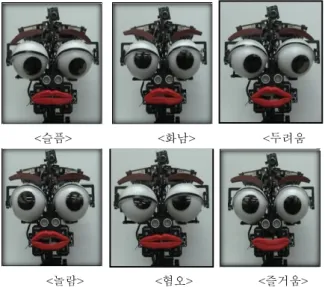
Buddy는 표정 요소인 눈썹, 눈꺼풀과 눈동자, 입술 및 목을 이용하여 표정과 제스처를 표현한다. 표현 가능한 기본 표정의 종류는 생성되는 감정의 종류와 일치하며, 에크만의 분류에 따라 기쁨, 슬픔, 화남, 공포, 혐오, 놀 람의 6가지로 구성되어 있다.[1] 하지만 기본 표정 이외 에도 표정 요소 조합 작동 및 엑츄에이터 구동 범위 조 절에 의한 복합 표정 표현이 가능하다.(그림 7)
기본 표정은 얼굴 표정으로 사람의 감정을 파악하는 데 초점을 둔 폴 에크만의 연구를 역으로 적용하여 로 봇에 구현하는 방식을 사용하였다. 즉, 특정 감정을 보 여주는 얼굴 요소의 특징을 추출 한 뒤, 이를 감정에 대 한 표정 구현을 위한 구동 기준으로 사용하였다. 해당 표정들은 정적인 표정들을 바탕으로 그 특징을 유지하 면서 생동감과 자연스러움을 더하기 위해 표정 요소들 이 지속적으로 움직이는 동적인 표정을 구현함으로써 자연스러움을 더한다.
한편, 목 움직임과 눈 깜박임은 기본적인 표정 요소 의 작동과 곁들여져 제스처를 생성하고 각 표정들의 컬 러링 요소로서 활용된다. 컬러링은 감정의 종류와 강도 에 따라 그에 대응하는 데이터베이스에서 랜덤하게 추 출되어 구현되는 방식을 채택하였다.
그림 7. 다양한 표정 구현
5.2.2 립싱크
립싱크는 단모음 ㅏ, ㅓ, ㅗ, ㅜ, ㅡ, ㅣ, ㅔ(ㅐ)를 비롯 한 모든 모음과 입술음 ㅁ, ㅂ, ㅍ의 입모양 표현이 가 능하다. 복모음의 경우에는 단모음 2개에 각각의 발음 시간을 부여하여 연속 동작시켜 입모양을 구현한다. 따 라서 평면 형상의 입술 모양 및 재료의 신축성 등을 감 안한다면, 한국어의 모든 모음 입모양을 연출하는 것이 가능하다. 또한, ‘바다’와 같이 연속된 동일 모음이 이어 져 음절 구분이 되지 않는 경우에는 중간에 음절 구분 음소를 인위적으로 삽입하여 자연스러움을 개선하였다.
5.2.3 얼굴 추적 및 눈맞춤
얼굴 로봇과 사람의 상호작용에 있어 기본적인 상호 작용은 얼굴 표정과 립싱크에 의해 이루어지지만 전시 및 실험 결과 사용자의 피부에 와닿는 현실감은 눈맞춤 과 얼굴 추적에 의해 발생한다. 이들은 작동자의 행동 에 대한 무의식적이고 반사적인 반응을 구현하기 때문 에 사용자는 보다 더 많은 자연스러움과 친근감을 가지 게 된다.
Buddy는 장착된 초음파 센서를 이용하여 대상으로부 터 측정되는 거리 값을 측정하고 안구 모임 각도를 조 절함으로써 눈맞춤을 구현하여 사람과의 지속적인 상호 작용을 유도한다. 또한 web cam을 이용하여 전방의 사
람 얼굴 위치를 파악하고 사람 얼굴이 정면에 보이도록 얼굴을 추종하여 상호작용을 원활히 하며, 사람의 얼굴 출현 및 이동은 Buddy의 감정 생성에도 영향을 준다.
5.3 모의 실험
감성 반응 결정 모델이 사람과 지속적인 인터렉션이 가능하도록 하는 요소는 성격이다. 로봇의 성격을 정의 하기 위해 성향적 전략과 환경적 전략을 적용한 Yu의 모델은 성격의 기본 단위가 되는 특질로서 신경증적 성 향(Neuroticism), 친화성(Agreeableness), 개방성(Originality), 외향성(Extroversion)을 채택하였다.
식 (3)의 xpe 는 이상의 4가지 성격을 성분으로 하는 행렬로서, 인터렉션 히스토리에 의한 로봇의 성격 변화 가 지속적으로 기록되므로 성격의 변화 추이를 이용해 상대적으로 장기적인 인터렉션 및 학습 효과 발현이 가 능하다.
신경증적 성향은 감정 요소 중 슬픔의 감정에 영향을 주는 요소로 슬픈 감정이 지속되면 해당 수치가 증가한 다. 신경증적 성향이 높은 로봇은 슬픔 감정을 일으키 는 자극에 민감해진다.(그림 8)
친화성은 최종 동기를 결정하는 기준의 성격 요소로 Neuroticism =0 (thick band=’Sadness’)
Neuroticism=1 (thick band=’Sadness’)
그림 8. ‘슬픔’ 감정에 대한 신경증적 성향의 영향
<슬픔> <화남> <두려움
<놀람> <혐오> <즐거움>
내/외부 동기 선택에 대한 처벌 혹은 보상으로 그 값이 증가/감소하게 된다. 예를 들어 외부 동기를 선택시 긍 정 자극(칭찬)이 입력되면 친화성이 증가하고 처벌하면 감소한다. 반면 내부 동기 선택시 긍정자극(칭찬)이 입 력되면 친화성이 감소하고 처벌하면 친화성이 증가한다.
친화성이 높은 로봇은 외부 동기를 실제 행동으로 연결 시키는 경향이 높고 친화성이 낮으면 내부 동기를 선택 하는 경향이 강하다. 즉 동기를 행동을 표현하지 않는 다.(그림 9)
개방성은 감정의 기복에 영향을 주는 요소로 외부 자 극의 일관성에 영향을 받는다. 즉 일관된 자극에 대해 서는 민감하게 되어 개방성이 증가한다. 개방성이 높으 면 동일 자극에 대해서도 감정의 기복이 심해진다.(그림 10)
마지막으로 외향성은 로봇의 행동 결정에 잣대가 되 는 요소로 같은 동기에 대해 외향성이 높은 로봇일수록 동기를 좀 더 적극적이고 명확하게 외부로 표현한다.
예를 들어, Yu의 강아지 시뮬레이터에서는 외향성이 높 Agreeableness=0
Agreeableness=0.05
그림 9. 최종 동기 선택에 대한 친화성의 영향
Originality=0
Originality=1
그림 10. 동일한 연속 입력 자극 상황에서 개방성이 감정 기복에 미치는 영향
으면 다리, 꼬리, 머리의 움직임에서 활발한 움직임을 선택하는 경우가 많아진다. 하지만 Buddy에서는 얼굴 이외의 구동 요소가 없으므로 외향성을 감정 표현의 강 도요소로 활용하여 표정 컬러링의 요소로 활용하였다.
외향성 역시 이전 행동 선택에 대한 칭찬과 처벌로 그 값이 증가, 감소하게 된다.
6. 결 론
본 논문에서는 다양하고 지속적인 외부 환경 정보의 수집을 바탕으로 감성 반응 결정 모델을 구동하여, 주 어진 상황에 대한 적절한 동기 및 감정을 생성하고 이 를 TTS를 통한 립싱크 및 얼굴 요소의 구동 즉, 표정 및 제스쳐로 표현 가능한 얼굴 로봇 Buddy를 개발하였 다. 특히 Buddy는 외부 환경 인지, 반응 결정, 립싱크, 표정 및 제스쳐 구현 기능 등에서 안정적이고 우수한 성능을 유지하면서도 경량의 구동부와 PC 한 대로 구 동이 가능한 간결한 시스템을 가지고 있으며, 센서 및 엑츄에이터 등의 주요 구성부를 상용품으로 구성하여 제작 비용을 대폭 절감하였다.
이와 같은 개발 성과는 감정 교류가 가능한 로봇에 대한 수요가 높아지고 있는 지능형 서비스 로봇 시장에
서 단독 구동 혹은 다른 시스템과의 결합 구동을 통해 감정 교류 로봇 상용화의 가능성을 넓힐 것으로 전망된다.
[1] Paul Ekman, Emotions revealed, Bada Publishing, 2006.
[2] Cynthia L. Breazeal, “Sociable Machines:Expressive Social Exchange Between Humans and Robots”, Di- ssertation Messaschusetts Institute of Technology, 1993.
[3] Kazuko Itoh, Hiroyasu Miwa, Yuko Nukariya, Massimiliano Zecca, Hideaki Takanobu, Stefano Roccella, Maria Chiara Carrozza, Paolo Dario, Atsuo Takanishi, “Me- chanisms and Functions for a Humanoid Robot to Express Humanlike Emotions”, Proceeding of IEEE Internationnal conference on Robotics and Automation, pp. 4390-4392, 2006.
[4] Chang Seok Choi, Kap Seok Choi, Youn Dong Lee,
“Lip Shape Synthesis of the Korean Syllable for Human Interface”, Trans. Of the KICS, Vol. 19, No. 4, pp. 614-623, 1994.
[5] C. W. Yu, “Behavior Decision Model of Intelligent Robot Based on Emotion and Dynamic Personality”, M.S Thesis (In Korean) Seoul National University, 2005.
김 승 종 1989 서울대학교 기계공학과
(공학사)
1991 한국과학기술원 기계공학 과 (공학석사)
1998 한국과학기술원 기계공학 과 (공학박사)
2007~현재 한국과학기술연구원 책임연구원 관심분야 : Human-Robot Interaction, Design and Control of
Mechatronics System
박 신 석
1989 서울대학교 기계설계학과 (공학사)
1991 서울대학교 기계설계학과 (공학석사)
1999 Messaschusetts Institute of Technology, Mechan- ical Engineering
(공학박사) 2007~현재 고려대학교 기계공학과 교수
관심분야 : Human-Machine Interface, 로봇 머니퓰-레이 터, 수술 로봇, 로봇 학습
장 명 수 2005 고려대학교 제어계측공
학과 (공학사) 2007~현재 고려대학교 공과
대학원 기계공학(석사 과정)
관심분야 : 얼굴로봇, 감정 생성 및 표현, 지능로봇 E-mail : [email protected]
오 경 균 2005 서울대학교 기계항공공
학부(공학사)
2007 서울대학교 기계항공공 학부(공학석사) 2007~현재 한국과학기술연구
원 지능시스템연구본부 장실 연구원
관심분야 : 얼굴 로봇, 메카트로닉스, Human Robot Interaction, 머신 비전
E-mail : [email protected]