1인승 전기차량의 임베디드 전동제어장치 설계
Design of Embedded Electrical Power Control Unit for Personal Electrical Vehicle
신 규 재*★, 차 현 록**
Kyoo-Jae Shin*★, Hyun-Rok Cha**
Abstract
This paper presents the design of embedded electrical power control unit for Personal Electrical Vehicle(PEV). The embedded unit is designed using PIC18F8720 processor, 16Mb flash ROM, 32Mb SDRAM and signal condition circuits. The proposed PEV consists of 4KW in-wheel Brushless DC Motor(BLDCM), 3 phase voltage source inverter with the 180 °conduction space vector PWM method, PID speed controller and the embedded control unit. The PEV has mechanical manufacture of inverse 3 wheel system, which is applied by the in-wheel BLDCM and steering mechanism with tilting function. Also, the performances of the proposed embedded electrical power control unit are verified through the lab experiment and road driving test of PEV.
요 약
본 논문은 1인승 전기차량의 임베디드 전동 제어장치 설계를 제안하였다. 제안된 임베디드 장치는 PIC18F8720 프로세서, 16Mb flash ROM, 32Mb SDRAM과 신호처리회로로 설계되었다. 제안된 1인승 전기차량은 4KW 인휠 BLDCM, 180° 도통 공간 벡터제어 3상 전압형 인버터, PID 속도제어기와 전동제어 장치와 임베디드 제어장치로 구성된다. 이 1인승 전기차량은 역 3륜 형태의 기계적인 구조를 가지고 있으며, 인휠 BLDCM과 틸팅 기능을 가지 는 조향 메카니즘이 적용되었다. 또한 제안된 임베디드 전동제어장치의 성능은 PEV에 대한 Lab 실험과 도로 주 행시험을 통하여 검증하였다.
Key words : Personal electrical Vehicle, Elctrical Driving System, Embedded Power Control, PWM VSI, BLDCM of PEV
* Dept. of Electrical Control Engineering, Suncheon First University, Cheonnam, Korea
** Automotive Components Research Group, Honam Regional Division, Korea Institute of Industrial Technology, Korea
★Corresponding author : Kyoo_Jae Shin
Tel : +82-61-740-1351, Email : [email protected] Manuscript received Jun. 2, 2014; revised Jun. 17,
2014; revised Jun. 23, 2014; accepted Jun 23. 2014
Ⅰ. 서론
지구 온난화, 화석연료 부족, 공기 오염 등과 같
은 이슈가 대두됨에 따라 친환경 차량의 필요성이 증 가하고 있다. 자동차가 친환경적으로 진화함에 따라 내연기관을 대체하는 전기적 주행모터의 전기차량에 대한 실용화 연구가 활발히 진행되고 있다. 현재 전 기차량은 배터리 충전량의 한계로 장거리 주행이 어 렵고 배터리가 차지하는 차량가격 문제로 1인승 전기 차량(Personal Electrical Vehicle; PEV)에 대한 연구 가 진행되고 있으며[1][2][3], 일본 도요타 아이로드 (i-Road), 독일 폭스바겐 닐스(NILS)와 유럽 르노 트 위지(Twizy) 등이 PEV의 상용화를 위한 실증시험이 추진되고 있다.
PEV는 주행모드와 제동모드상태의 효율적인 전력 구동제어의 수행이 필요하고, 주행모드에서는 최대전
력을 기계토크로 출력할 수 있어야 하며, 제동모드에 서는 차량을 제동시킬 때 발생하는 기계적 에너지를 전기에너지로 흡수하고 저장 회수할 수 있어야 한다.
결과적으로 PEV의 동력 효율의 극대화를 위하여 전 동력의 효율적인 구동제어가 매우 중요하다.
본 논문에서는 PEV 주행모터 BLDCM의 속도제어 를 위하여 임베디드 구동제어장치를 설계하고, 차량 현장적응 실험을 통하여 설계된 임베디드 구동제어장 치의 성능을 평가한다. 본 연구에서 적용된 1인승 전 기자동차는 운전자의 안전을 보장하고 승차감 향상을 위한 역 3륜 형태의 차체, 틸팅기능을 가지는 조향장 치, 차량의 주행력 확보를 위한 인휠형 BLDCM 및 3 상 전압제어형 인버터(VSI)가 그림1과 같이 적용되었 다[1],[2]. 본 논문에서 설계된 임베디드 구동제어장치 는 PIC18F8720 프로세서를 적용한 MCU, 16Mb flash ROM, 32Mb SDRAM와 신호처리회로로 구성되어 PEV의 구동속도제어를 수행한다.
Fig. 1. Concept car of designed PEV 그림 1. PEV 설계차량의 개념도
Ⅱ. 본론 1. 주행모터 BLDCM 해석
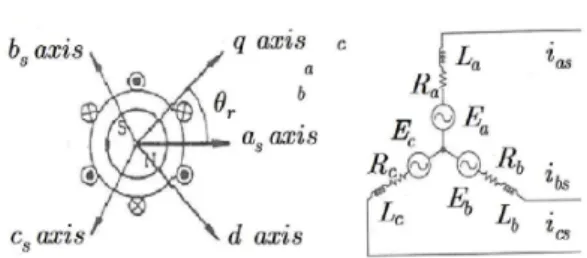
본 PEV에 적용된 주행모터에 대한 3상 BLDCM (Brushless DC Motor)의 등가모델 회로는 그림2와 같으며, 상전압식은 식(1)과 같다. 여기서 는 고 정자 각 상에 유기되는 자속이고, 은 회전자 영구 자석에 의해 유기되는 고정자에 유기되는 쇄교자속이 다.
‧ ‧ (1) 단, ‧
sin sin sin
Fig. 2. Equivalent circuit of 3 phase 2 pole BLDCM 그림 2. 3상 2극 BLDCM의 등가회로
BLDCM은 상과 상은 120° 3상으로 식(2)와 같이 나타낼 수 있고 변환식은 식(3)과 같으며,
역변환식은 식(4)와 같다. 식(4)를 이용하여 식(1)을 기준축으로 변환은 식을 수행한다.
(2)
coscos
cos
sinsin
sin
(3)
cos sin cos
sin
cos
sin
(4)
‧ (5)
‧ (6)
‧ ‧
‧ ‧
(7) 1인승 전기차량 주행 전동기 BLDCM은 3상 영 구자석형 동기전동기로써 역기전력이 정현파로 나 타나며 전류에 의해 전동기에 유기되는 토오크는 식(8)과 같으며, 기계적 전동기 토오크는 식(9)와 같다[4].
(8)
(9)여기서, : 고정자저항
: 축 인덕턴스
: 회전자와 부하 관성모멘트
: 점성마찰계수
: 영구자석의 누설자속
: 극수
: 축 전류
: 축 전압
: 회전자 전기 각속도
: 전자계 토오크
: 부하 토오크
전동기가 벡터제어기법에 의해 구동되고 내부에 전류제어 기를 포함한다고 가정하면, 축 상의 전류 는 영으로 가 정할 수 있으므로 전동기에서 발생하는 토오크는 식(10)과 같다.
(10)
여기서
2. PEV 주행용 브러쉬리스 DC 전동기
Fig. 3. 3 phase BLDC inwheel motor of designed driving motor 그림 3. 설계된 주행전동기의 3상 BLDC 인휠 모터
1인승 전기차량은 제한된 공간에서 높은 출력을 요구하기 때문에 유도기, BLDCM, 스위치드 릴럭턴스 모터와 영구자석 동기모터가 차량 구동모터로 활용화 연구가 연구되어 왔다. 특히 브러쉬리스 DC전동기 (BLDCM)은 In-Wheel형 구조로 그림3과 같이 휠 내 부에 장착되는 외전형 구조로써 디스크 형태의 제동 장치와 타이어 일체형 동력장치를 구성할 수 있다.
또한 높은 기동토크, 긴 정출력 구간, 높은 운전속도 등의 특성으로 인하여 1인승 전기자동차의 설계 요구 조건을 충족시킬 수 있도록 설계되었다[1][2].
1인승 전기차량의 주행전동기의 조건으로 저속도 구간에서 고토오크가 필요하고 3륜 후륜 구동구조이 기 때문에 고토오크 및 토크리플이 적어야 한다. 따 라서 본 전기차량에 적용된 인휠형 BLDC 모터는 전
자계해석을 통해서 구동영역에서 최대효율을 얻을수 있도록 RSM(표면반응법)-DOE방법을 이용하여 최적 화 설계를 진행하였다[5],[6],[7]. 극수와 슬롯수의 최 적 비율 해석을 통해 32극 27슬롯으로 선정하고 구동 영역 1,200[rpm]에서 고토크 출력을 낼 수 있도록 설 계 하였다. 또한 코어의 와류손을 줄이기 위하여 두 께 0.35mm인 S-18재질을 사용하고, 출력을 올릴 수 있도록 높은 자속밀도를 가지는 희토류 계열의 NdFeB 45SH 자석을 사용하였다.
코깅토크와 토크리플에 영향을 주는 코어 형상 인 자들로써 슬롯 오픈과 슬롯치 두께(TGD)가 증가할수 록 출력이 증가하였고 슬롯 오픈이 클수록 코깅토크 가 증가하고, 슬롯치 두께(TGD)가 증가할수록 코깅 토크는 감소하는 결과를 확인 하였으며, 또한 공극의 거리와 마그넷 위치에 따른 코깅토크와 토크리플 변 화를 확인하여 모든 인자들 사이의 최적화 설계 제작 하였다[2].
주행 구동모터의 정격은 3.24[KW], 1200[rpm]이며, BLDCM의 정역 및 회생제동이 필요하다. 출력 토크 의 상전류 순시제어를 위하여 BLDCM 내부에 고신 뢰성과 강인성을 갖춘 홀센서가 매입 적용되었다. 또 한 홀센서 출력신호는 회전자 위치각뿐만 아니라 F/V 컨버터에 의하여 그림4와 같이 속도 출력값을 검출한다.
Table 1. Driving motor specification of PEV BLDCM 표 1. PEV BLDCM 주행 전동기 사양
구 분 규 격
정격 속도 1,200 [rpm]
구동 토크 34.40 [Nm]
효율 88.0 [%]
출력 3.24 [kw]
슬롯수 27
극수 32
공급전원 정격전압 72 [V]
정격전류 80 [A]
3. 주행모터 BLDCM의 PWM 상전류제어
PEV 주행용 BLDCM의 속도는 식(8)의 상전류 가 영이 되면, 상전류 제어에 의하여 선형화된 토 오크를 식(10)과 같이 제어할 수 있다. 그림4와 같이 속도명령에 대한 속도 오차값은 2상/3상 벡터제어에 의하여 주행용 BLDCM의 상전류를 제어함으로써 원 하는 속도와 토오크 출력을 얻을 수 있다[4].
PEV 주행전동기의 특성상 BLDCM는 전구간에서 고토오크와 빠른 속응성이 요구된다. 본 PEV에 적용 하는 인버터는 국외 기존제품에 대한 성능비교를 위
한 목적과 내구성 및 개발시간 등의 이유로 3상 PWM VSI (Pulse Width Modulation Voltage Source Inverter)를 적용한다. 3상 PWM VSI는 정현파 형태 의 펄스폭 변조를 가지는 180° 도통의 3상 PWM 전 압형 인버터는 공간벡터에 의하여 제어된다. 또한 BLDCM을 구동제어하기 위한 임베디드 전동제어장 치는 그림3의 주행모터 BLDCM에 매입된 홀센서의 3상 위치각 입력신호을 기준으로 그림5와 같이 180°
Fig. 4. SPeed controller of the driving BLDCM 그림 4. BLDCM 주행전동기의 속도제어기
Fig. 5. Space voltage vector of 180° switching and PWM 그림 5. 180° 도통제어 및 PWM 공간전압 벡터
sin (11.a)
sin
(11.b)
sin
(11.c)
sin
(12.a)
sin
(12.b)
sin
(12.c)
도통의 6스텝 게이트 신호를 발생하여 3상 전압형 인 버터의 MOSFET를 도통제어한다. 임베디드 전동제어 장치는 U, V, W의 각 상에 식(11)의 변조지수가 적 용된 15개 펄스신호가 발생하며, 이때 식(12)와 같이 선간전압이 적용되어 3상 정현파 전압형 인버터를 구 현한다[8][9].
4. 전력구동 임베디드 구동 제어장치 설계
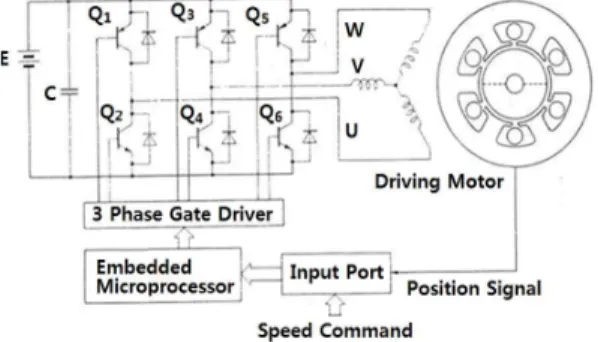
1인승 전기차량에 적용된 BLDM의 속도제어를 구 현하기 위하여 그림6과 같이 전력구동 임베디드 속도 제어장치가 적용되며, 속도제어기, 공간벡터 제어기, 3 상 PWM 전류제어기를 포함한 전압형 인버터(VSI)와 게이트 드라이버로 구성된다.
Fig. 6. Embedded driving control unit with BLDCM 그림 6. BLDCM 주행전동기와 임베디드 구동제어장치
적용된 PIC18F8720 프로세서 임베디드 제어장치의 메모리맵과 하드웨어 인터럽트는 표2와 같다. 식(11) 의 PWM 변조지수 을 적용하여 그림7과 같이 PWM 인터럽트에 의하여 3상 인버터의 구동제어가 구현된다.
그림 8은 BLDCM 구동을 위한 벡터 제어의 블록 다이어그램으로 축과 축 전류제어기, 변환기, 입력 토크와 속도 명령에 따른 축 전류를 생성하 는 전류지령 발생기 등으로 구성되어 있다. 설계된 임베디드 구동제어장치는 PIC계열의 PIC18F8720 MCU, 16Mb flash Rom, 32Mb SDRAM, 신호처리회 로로 표3의 3상 BLDCM 인버터 구동제어회로로 구 성되어 있다.
주행차량의 BLDCM 속도제어는 속도명령과 주행 모터에 매입된 홀센서의 펄스신호를 F/V 컨버터에서 속도 출력신호로 변환하고 속도명령과 속도출력의 오 차분을 PID 보상제어 한다. 이 보상된 Q상 전류신호
는 각상의 홀센서 펄스신호에 의하여 각상의 상전 류 , , 를 발생하고 이 값은 각상에서 검출된
Table 2. Memory map of embedded control unit 표 2. 엠베디드 제어기의 메모리 맵
Address Control Function 000000h - 007fffh EPROM
008000h - 00ffffh SRAM 804000h - 805fffh Expansion Bus 808000h - 8097ffh Peripherals 809800h - 809bffh RAM Block 0 809C00h - 809fffh RAM Block 1 INT 0 000001h System Fault Detection INT 1 000002h A/D Conversion INT 2 000003h Synchronism w/h PWM INT 3 000004h DC/DC Conversion
상전류에 , , 의하여 3상 펄스폭변조 제어기에서 식(11)과 식(12)에 의하여 최적 상태로 전기차량 주행 에 필요한 BLDCM의 전동력 제어신호를 출력한다.
주행모터 BLDCM은 성능과 기계적 구조 측면에서 회전자에서의 손실이 작아 효율이 높으며, 회전자 구 조로 인해 고속운전이 가능하다. 또한 BLDCM 구동 제어에는 빠른 토크 응답이 가능한 그림4와 그림5의 벡터제어가 적용된다.
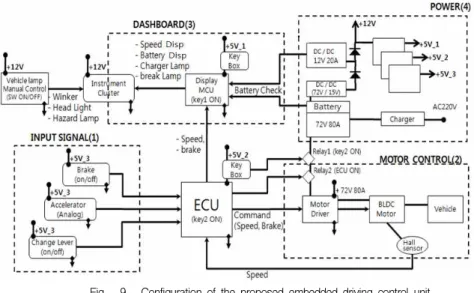
Fig. 9. Configuration of the proposed embedded driving control unit 그림 9. 제안된 임베디드 구동제어장치 구성
Fig. 7. PWM interrupt control signals 그림 7. PWM 인터럽트 제어신호
Fig. 8. Block diagram of the proposed driving controller 그림 8. 제안된 구동제어기의 블록다이어그램
1인승 전기차량의 속도제어기는 BLDCM과 부하의 식(8)(9)에서 간략화모델에 근궤적을 적용하여 임계이 득 과 임계주파수 을 구한 후, Ziegler-Nicols 방법[12]의 식(13)을 각기 적용하여 PID 이득 , ,
를 선정하였다.
이 값은 기준으로 차량실험의 시행착오방법에 의 하여 그림8 PID제어기의 , ,
를 각기 적용하였다.
(13.a)
(13.b)
(13.c)
Table 3. Applied inverter specification 표 3. 적용된 인버터 사양
구 분 규 격
Type PWM VSI
Rated. Power 4KW, 1200rpm Operating voltage 72Vdc
Cooling Forced air Size[mm] 265×205×170
본 논문에서는 그림9와 같이 BLDCM 속도제어기 를 포함한 1인승 전기차량용 임베디드 구동제어장치 를 제안한다. 차량 내부장치에 필요한 전원 12[Vdc]
와 5[Vdc] 전압을 생성해야 하고 내부적으로는 주행 부의 고전류 전기장치와 전자차폐를 통하여 제어기 및 내부 전자장치에 전자파간섭을 보장해야 한다.
설계된 제어장치는 입력 전원은 72[Vdc], 80[A] 리 튬 인산철 배터리를 이용하였고 MCU(Main Control Unit)는 대쉬보드 계기판, ECU(Electrical Control Unit), VSI와 센서에 필요한 전원 공급을 목적으로 72[Vdc]/ 12[Vdc], 12[Vdc]/5[Vdc]의 DC/DC컨버터를 포함하고 있다.
Ⅲ 실험결과
본 PEV의 주행모터는 슬롯수/극수 27/32 구조로 회전자와 고정자 코아와 정격용량 72[Vdc], 80[A]으 로 그림10과 같이 제작되고, 주행 전동기에 대한 성 능 실험결과 표1과 같이 정격출력 3.24 [KW], 정격속 도 1,200[rpm], 구동 토오크 34.4[Nm]을 적용하였다 [2].
설계된 전동제어기는 다이나모 MG에 주행 전동기 를 그림 11과 같이 장착하고 무부하 및 부하상태에서 속도제어 실험을 수행하였다. 그림 12(a),(b)는 주행
전동기내에 매입된 홀센서로 부터 검출된 회전자 U, V, W상에 대한 위치각 펄스신호와 인버터 홀센서에 의해 검출된 상전류 출력신호이다. 그림12(a)는 100[rpm] 저속운전과 그림12(b)는 1,200[rpm] 고속운 전에서의 ①②③채널에서 U, V, W상 위치각 펄스신 호이고 ④채널에서는 상전류 파형을 나타낸다. 펄스 구동제어 실험결과, 위치각 신호에 정확하게 상전류 가 발생함을 확인할 수 있다. 또한 속도응답 실험은 정지상태에서 최고속도 1,200 [rpm]에 도달하는 스텝 응답실험이 수행하였다. 그 결과 그림12(c)와 같이 목 표값 도달시간 1.8 [sec]이었고, 목표값에는 ±0.1%내 로 안정되게 속도명령 목표값에 추종하였다.
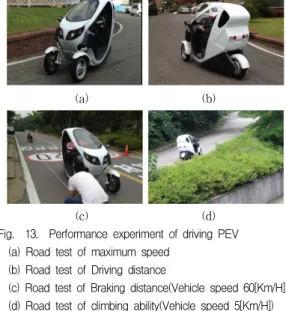
설계 제작된 PEV의 도로 주행성능시험을 그림 13 과 같이 최고속도, 주행거리, 최대속도 도달시험, 제동 시험, 등판능력을 각기 시험하였다.
Fig. 10. In-wheel BLDCM for PEV 그림 10. PEV 적용을 위한 인휠 BLDCM
Fig. 11. Lab experiment of embedded control unit 그림 11. 임베디드 구동제어기의 성능 LAB
본 논문의 1인승 전기차량에 대한 설계목표는 국 토해양부 고시(2010-165호) 근거리 전기자동차 안전 규정에 근거하여 차량의 안전속도 60[Km/H]로 설정 하였으며, 1회 충전 주행거리는 도심 내에서 이동하 는 차량의 안전된 이동거리를 확보하기 위한 목적으 로 기존 차량의 최대 이동거리에 대한 평균거리를 적 용하여 1회 충전거리 100[Km]를 선정하였다. 또한 전 기차량의 제동 안전을 확보하기 위하여 시속 60 [Km/H] 주행 조건에서 제동거리를 15[m]이내이고, 등판능력은 시내 일반 도로의 등판각도를 기준으로 12 [deg]를 표4와 같이 설계목표로 설정하였다.
(a)
(b)
(c)
Fig. 12. Performance experiment of embedded VSI (a) Hall sensor output of ① CH U phase, ② CH V phase,
③ CH W phase (5 [V/div])
④ CH phase current 5 [A/div], Time 20 [ms/div]
(b) Hall sensor output of ① CH U phase, ② CH V phase,
③ CH W phase (5 [V/div])
④ CH phase current 5 [A/div], Time 1 [ms/div]
(c) Step response result of speed command 1,200[rpm]
① speed output 2 [V/div], speed scale factor 400 [rpm/V]
② phase current 5 [A/div], Time 400 [ms/div]
그림 12. 임베디드 VSI 구동제어장치의 성능실험파형 (a) ① U, ② V, ③ W상 홀센서 출력신호 5 [V/div]
④ 상전류 5 [A/div], 시간 20 [ms/div]
(b) ① U, ② V, ③ W상 홀센서 출력신호 5 [V/div]
④ 상전류 5 [A/div], 시간 1 [ms/div]
(c) 속도명령 1,200[rpm]의 스텝응답 실험결과
① speed output 2 [V/div], 속도 스케일값 400 [rpm/V]
② phase current 5 [A/div], 시간 400 [ms/div]
설계 차량의 성능실험은 각 시험항목별로 3회 반 복실험을 수행한 실험 결과는 표 4와 같다. 최고속도 시험결과 81[Km/H] 출력되었다. 근거리 전기자동차 안전규정에 근거하여 차량의 안전 설계 목표를 위하 여 60[Km/H]로 속도를 제한하였으며, 리튬 인산철 배터리(72[V], 80[A])를 완충한 상태로 일반도로를 주 행 실험한 결과 105 [Km] 주행이 가능하였다.
최고 제한속도 60 [Km/H]로 도달하는 시간과 이 조건에서 제동력을 실험한 결과, 평균 도달시간은 11.3[sec]와 제동거리는 12.2[m]로 설계조건을 만족하 였다. 또한 등판능력시험은 주행속도 5.0[Km/H]를 유 지한 상태에서 12.3[deg] 도로조건에서 등판이 가능하 였다. 상기 실험을 통하여 설계 제작된 PEV는 안정 된 주행성능과 설계목표를 충분히 만족함을 확인 할 수 있었다.
(a) (b)
(c) (d)
Fig. 13. Performance experiment of driving PEV (a) Road test of maximum speed
(b) Road test of Driving distance
(c) Road test of Braking distance(Vehicle speed 60[Km/H]) (d) Road test of climbing ability(Vehicle speed 5[Km/H]) 그림 13. 1인승 전기차량의 구동제어 성능실험
(a) 최대속도 시험 (b) 충전 주행거리 측정시험
(c) 브레이크 제동시험(주행속도 60[Km/H]) (d) 등판능력 시험(주행속도 5[Km/H])
Table 4. Performance experiment results of driving PEV 표 4. PEV 주행 성능실험 결과
평가항목 단위 주행 성능실험
설계목표 시험결과
최고속도 Km/H 60 81.0
(제한속도 : 60)
충전주행거리 Km 100 이상 105
60Km/H 도달시간 sec 15 이내 11.3 제동성능(60Km/H주행) m 15 이내 12.2
등판능력 deg 12 이상 12.3
Ⅳ 결론
1인승 전기자동차는 운전자의 안전을 보장하고 승 차감 향상을 위한 역 3륜형태의 차체, 틸팅기능을 가 지는 조향장치, 차량의 주행력 확보를 위한 인휠형 BLDCM 및 3상 전압제어형 인버터(VSI) 등으로 구 성된다[1],[2].
논 논문에서는 BLDCM의 구동제어를 위하여 180°
도통 공간벡터 제어형 PWM VSI 제어를 위하여 PIC18F8720 프로세서를 적용한 MCU, 16Mb flash Rom, 32Mb SDRAM 등으로 3상 BLDCM 인버터 구 동제어회로로 구성되어 있다.
1인승 전기차량의 주행용 BLDCM에 대한 구동제 어를 위하여 임베디드 구동제어장치 설계하였고 Lab 실험과 PEV 주행실험을 통하여 구동제어에 대한 성 능을 검증하였다. 차량에 장착하여 3상 PWM- VSI를 구동제어 한 결과, 속도응답 실험은 정지상태에서 최 고속도 1,200[rpm]에 도달하는 스텝응담 실험결과 목 표값 도달시간 1.8[sec]이었고, 목표값에는 ±0.1%내로 안정되게 속도 목표값에 양호하게 추종이 우수함을 그림 12에서 확인 할 수 있었다. 설계 제작된 PEV의 도로 주행성능시험을 위하여 최고속도, 주행거리, 최 대속도 도달시험, 제동시험, 등판능력을 시험한 결과, 제안된 그림8과 그림9의 임베디드 구동제어장치는 안 정된 주행성능과 설계목표를 충분히 만족함을 확인 할 수 있었다. 추후 인버터의 전력효율 및 고조파 문 제를 개선하기 위하여 역률개선의 전류제어형 정현파 인버터에 대한 연구를 지속할 계획이다.
References
[1] Kyoojae Shin, Hyunrok Cha, Younju Seo,
“Development of Pesonal Electrical Vehicle”, The Korea Institute of Power Electronics, KIPE, vol.16, No.2, pp.44∼
48, 2011
[2] H.R. Cha, K.J. Shin, Y.J. Seo, “Design of Outer Rotor IPM type PMSM for 3 Wheel Electric Vehicle, ICEMS, 2011
[3] Z. Q. Zhu and D. Howe, "Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles", Proceedings of the IEEE, pp.746∼765, 2007
[4] Krause P.C “Analysis of Electric Machinery”, McGraw-Hill, New York, 1986
[5] Karim Abbaszadeh, Mostafa Jafari, “Optimizing
cogging torque reduction in slot opening shift method for BLDC motor by RSM ” PEDSTC, 2nd. pp.62-66, 2011 [6] K.T Chau, Dong Zhang, J.Z. Jiang, Chunhua Liu and Yuejin Zhang, “Design of a magnetic-geared outer-rotor permanent magnetic Brushless motor for electrical vehicles”, IEEE Transactions on magnetics, Vol.43, No.6, pp.2504∼2506, 2007
[7] Y. Fan, X. Han, Z. Xue and H. Jiang, “Design, analysis and control of a permanent magnet in-wheel motor based on magnetic-gear for electric vehicles”, ICEMS, 2011
[8] Takashi Kenjo, “Power Electronics for the Microproce ssor Age”, Oxford University Press, 1994
[9] Richrd Valentine, “Motor Control Electronics Hand- book”, McGraw-Hill, 1998
[10] KJ Shin, HR Cha, YJ Seo, JY Lim, “Design of bike inverter using adative state observer of dc-link”, ICEMS, 2012
[11] Ion Boldea, S. A. Nasar, “Electric Drives”, CRC Press, 1998
[12] Bahram Shahiab & Michael Hassul, “Control system design using Matlab”, Prentice-Hall Intena –tional Inc.,pp.171∼177, pp.284∼287, 1993
BIOGRAPHY
Shin Kyoo-Jae(Life Member)
1985 : BS degree in Electronics Engineering, Wonkwang University.
1988 : MS degree in Electrical Engineering, Cheonbuk National University.
2009 : PhD degree in Electrical Engineering, Busan National University.
1988.4∼1991.7 : Navy Technology School
1991.8∼1997.2 : Research Manager Engineer, Doosan Ind.
1997.3∼Present : Professor in Dept. of Electrical Control Engineering, Suncheon First University
Cha Hyun-Rok(Member)
1998 : BS degree in Chemical Engineering, Chonnam National University.
2000 : MS degree in Electrical Engineering, Chonnam National University.
2009 : PhD degree in Information Processing, Tokyo Institute of Technology.
2000~2004 : Engineer, Samsung Gwangju Electronics 2004~Current : Senior Researcher, Korea Institute of industrial technolgy