마그네틱 랜드마크를 이용한 모바일 로봇의 위치 인식 및 위치 보정 기술의 개발
Development of Localization and Pose Compensation for Mobile Robot using Magnetic Landmarks
김 범 수
1
, 최 병 준2
, 유 원 석3
, 문 형 필4
, 구 자 춘5
, 최 혁 렬†
Bum Soo Kim
1
, Byung June Choi2
, Won Suk You3
, Hyung Pil Moon4
, Ja Choon Koo5
, Hyouk Ryeol Choi†
Abstract In this paper, we present a global localization and position error compensation method in a known indoor environment using magnet hall sensors. In previous our researches, it was possible to compensate the pose errors of x e , y e , θ e correctly on the surface of indoor environment with magnets sets by regularly arrange the magnets sets of identical pattern. To improve the proposed method, new strategy that can realize the global localization by changing arrangement of magnet pole is presented in this paper. Total six patterns of the magnets set form the unique landmarks. Therefore, the virtual map can be built by using the six landmarks randomly. The robots search a pattern of magnets set by rotating, and obtain the current global pose information by comparing the measured neighboring patterns with the map information that is saved in advance. We provide experimental results to show the effectiveness of the proposed method for a differential drive wheeled mobile robot.
Keywords : Mobile Robot, Global Localization, Pose Compensation, Magnet, Hall Sensor
1. 서 론1)
최근 지능형 로봇은 고급화된 기술을 바탕으로 실용적 인 목적을 위해 가정, 공공 시설, 군사 시설 등에 적용되고 있으며 사회 전반에 걸쳐 그 활용성이 커지고 있다. 특히 지능형 서비스 로봇은 IT 기술과 융합하여 가사 보조, 의 료 보조, 정보 안내 등 다양한 영역에 걸쳐 개발 및 사용되 고 있다. 이러한 로봇은 모바일 로봇에 근간을 두어 산업 용 로봇과 달리 고정된 위치에서 작업뿐만 아니라 이동을 통해 다양한 작업 수행이 가능하다.
로봇에서 이동은 가장 기초적이며 필수적인 기능으로 자율 이동을 통해 고차원적인 작업이 가능하며 따라서 로
Received : Mar. 10. 2010; Reviewed : Jun. 03. 2010; Accepted : Jun. 11. 2010
※ 본 과제(연구)는 지식경제부와 한국산업기술진흥원의 전략기술인력양 성사업의 과제의 지원을 받아 수행되었음.
† 교신저자: 성균관대학교 기계공학부 교수([email protected])
1 LIG넥스원 연구원( [email protected])
2 성균관대학교 기계설계학과 박사과정([email protected])
3 성균관대학교 기계공학부 석사과정([email protected])
4 성균관대학교 기계공학부 부교수([email protected])
5 성균관대학교 기계공학부 조교수([email protected])
봇 스스로 자신의 위치를 인식하는 기술은 매우 핵심적이 다. 이러한 위치 인식 기술은 모바일 로봇의 역사와 함께 그 동안 많은 연구가 있었으나 여전히 로봇 개발에서 해결 해야 할 문제로 남아있다.
대부분의 모바일 로봇은 오도메트리(odometry)에 기반 하여 위치 정보를 얻는다. 그러나 오도메트리(odometry)는 모바일 로봇의 하드웨어 구성의 미묘한 결함에도 치명적 인 영향을 받을 수 있다. 즉 모바일 로봇의 무게 중심이 휠 베이스 (wheelbase) 중심과 일치 하지 않거나 양쪽 바퀴의 크기가 다를 경우 센서를 통해 측정된 바퀴의 회전량과 함 께 오차가 누적되어 잘못된 위치 정보를 얻게 된다. 이러 한 오차의 누적은 시간이 지남에 따라 커지며 결국 지속적 인 위치 인식의 신뢰성을 잃게 된다.
모바일 로봇 위치 인식의 어려움을 해결하기 위해 오도 메트리(odometry) 오차를 줄이기 위한 수학적 분석, 센서 퓨전을 통한 오차 보정, 비젼을 통한 이미지 프로세싱 (image processing) 등 다양한 연구가 진행 되었고, 그 결과 UMBmark(University of Michigan Benchmark), EKF(Extended Kalman Filter)를 이용한 위치 인식, MCL(Monte Carlo Lo-
그림 1. Testbed calization), 랜드마크 인식 등 모바일 로봇의 위치 인식을
위한 장치 활용의 보다 최적화된 방법이 제시되었다
[1-4]
. 그 중 랜드마크를 이용한 위치 인식 방법은 전역 위치 인 식(Global Localization)을 실현 할 수 있는 대표적인 방법이다
[5-7]
. 실례로 RFID태그 또는 바코드(Bar code)를 랜드마크로 사용하여 모바일 로봇의 위치 인식을 구현한 연구가 진
행되었다
[8-10]
. 그러나 이러한 방법은 RFID 안테나, 또는 바코드나 마크를 인식하는 카메라 성능의 한계로 위치 인식 시 작게는 cm단위에서 크게는 m단위까지 오차가 발생하 는 등 정확한 위치 인식 구현에 어려움이 있다. 모바일 로 봇을 실제의 작업에 활용하기 위해서는 정확한 위치 인식 과 이를 통한 목표점으로의 이동이 기반이 되어야 하며 앞 서 언급한 위치 인식 기술을 적용할 경우 원활한 작업수행 이 어렵다.
따라서 본 논문에서는 실제 작업에 활용이 가능한 모바 일 로봇의 보다 정확한 위치 인식을 위하여 마그네틱 랜드 마크를 사용하는 전역 위치 인식(Global Localization) 방법 을 제안한다. 본 논문에서 정의하는 마그네틱 랜드마크는 4개의 자석으로 구성되며 각각의 자석에서 발생하는 자기 장에 의해 하나의 랜드마크는 고유한 자기장을 형성한다. 이와 함께 모바일 로봇은 선형적으로 자기장을 검출할 수 있는 홀센서를 가지며 랜드마크의 자기장에서 발생하는 홀센서 출력을 통해 1mm 단위의 위치 좌표 오차 추정이
가능하다
[12, 13]
. 또한 4개의 자석의 배치에 따라 최대 6가지의 서로 다른 자기장을 형성하는 랜드마크를 만들 수 있으 며 마찬가지로 각각의 랜드마크에서 홀센서를 이용한 위 치 오차 추정 및 랜드마크 인식이 가능하다. 이러한 특징 을 기반으로 본 논문에서 제안하는 위치 인식 방법은 전역 위치 인식(Global Localization)과 함께 위치 오차 추정 및 보정이 가능한 장점을 가진다.
본 논문은 이러한 전역 위치 인식(Global Localization)을 위한 환경 구성과 요소 기술에 대해 설명하며 이를 적용한 실험 결과를 보였다. 2장에서는 전반적인 실험 환경에 대 하여 소개하였고 3장에서는 위치 오차 추정 및 보정 방법 을 설명하였다. 4장에서는 랜드마크 형성, 랜드마크 인식 과 이를 기반으로 하는 전역 위치 인식(Global Localization) 방법을 설명하였다. 5장에서는 전역 위치 인식(Global Localization) 알고리즘을 모바일 로봇에 적용한 실험 결과 를 논의하였으며 6장에서 결론과 함께 개선 방안 및 향후 연구에 대하여 제시하였다.
2. 실험 환경의 구성
이 장에서는 본 논문에서 제안하는 모바일 로봇의 위치
인식 및 위치 오차 보정을 위한 실험 환경에 대해 살펴보 기로 한다. 실험 환경은 모바일 로봇의 이동 공간과 모바 일 로봇으로 구성된다.
2.1 이동 공간의 구성
이동 공간은 2차원 평면으로 가정하며 로봇의 좌표는 x,
y, θ로 표현한다. 이동 공간은 테스트베드로 구현되며 모
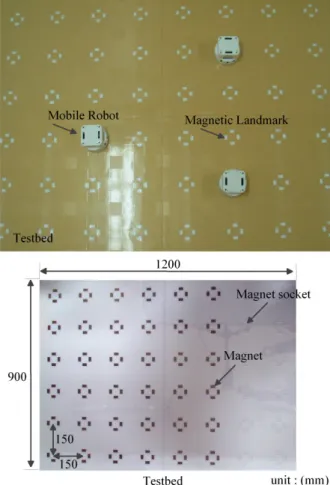
바일 로봇의 이동 및 작업은 이 공간에서 이루어진다. 테 스트베드는 그림 1과 같다. 크기는 가로 1.2m, 세로 0.9m이 고 표면으로부터 4mm 깊이 아래에는 탈착이 가능한 영구 자석이 특정한 배치를 이루며 테스트베드 전체에 균일하 게 분포 되어 있다. 자석과 홀센서 간의 높이는 홀센서의 민감도(sensitivity) 변수를 조절함으로써 변경 가능하다. 자 석은 그림 2에서 보이는 것과 같이 4개가 대칭적으로 배치 되어 하나의 마그네틱 랜드마크를 형성한다. 각각의 랜드 마크는 테스트베드 내에서 격자 형태로 150mm의 간격을 유지하며 고유의 좌표를 갖는다. 이러한 랜드마크의 배열 을 통해 테스트베드 전체는 그림 2와 같은 그리드 맵(grid map) 형태의 절대좌표계를 구성한다.그림 2. Global coordination
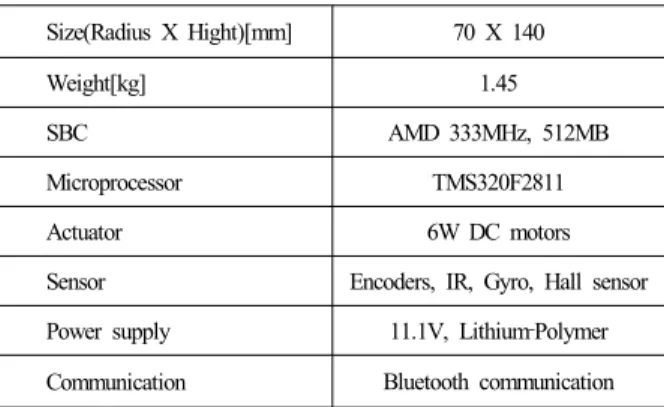
그림 3. Organization of mobile robot
Size(Radius X Hight)[mm] 70 X 140
Weight[kg] 1.45
SBC AMD 333MHz, 512MB
Microprocessor TMS320F2811
Actuator 6W DC motors
Sensor Encoders, IR, Gyro, Hall sensor Power supply 11.1V, Lithium‐Polymer Communication Bluetooth communication
표 1. Specification of the mobile robot
Supply Voltage[V] 5
Voltage output[V] 0 ~ 5
Offset Voltage[V] 2.47
Sensitivity[mV/mT] 120
표 2. Characteristic of the hall sensor 테스트베드에서 마그네틱 랜드마크를 형성하는 자석은
영구 자석으로 주재료는 네오디뮴(Nd)이 사용되었다. 크기 는 가로 20mm, 세로 12mm, 높이 3mm이며 착자 방향은 가 로 방향으로 자기장의 세기는 최대 3000G이다. 테스트베 드에는 총 192개의 자석이 배치될 수 있으며 가로 8, 세로 6개씩(8x6) 총 48개의 랜드마크를 이룬다. 위치 오차 보정 을 위해 사용된 마그네틱 랜드마크는 그림 2과 같은 자석 배치로 형성된다. 4개의 자석을 정사각형 형태로 배치함으 로써 자석 배치의 중심, 즉 랜드마크 중심에 대하여 모바 일 로봇의 중심 좌표(x, y, θ) 추정이 가능하다. 이에 대한 설명은 3장에서 자세히 다루도록 하겠다.
2.2 모바일 로봇의 구성
본 연구에서는 그림 3과 같이 엔코더가 부착된 6W급 DC모터 2개로 두 바퀴가 각각 구동되는 방식(differential‐
drive)의 소형 모바일 로봇을 제작하여 사용하였다. 이 모 바일 로봇은 DSP(TMS320F2811)를 기반으로 구동부와 함 께 장애물 회피를 위한 6개의 적외선 센서를 탑재하여 자 율 주행 및 장애물 회피가 가능하다.
이와 함께 마그네틱 랜드마크 인식과 위치 오차 추정을 위한 홀센서 4개가 모바일 로봇 바닥면에 부착되어 있다.
각 홀센서는 로봇 중심으로부터 정면, 우측면, 좌측면, 후 면 방향으로 25mm거리에 90도 간격을 이룬다. 이러한 배 치는 마그네틱 랜드마크를 구성하는 4개의 자석 배치와 일치하며 각 자석의 중심과 각 홀센서의 중심이 일치할 경 우 모바일 로봇의 중심과 마그네틱 랜드마크의 중심이 일 치한다. 이러한 구성은 모바일 로봇의 홀센서를 이용하여 마그네틱 랜드마크 중심에 대한 위치 추정을 가능하게 한 다. 또한 이동 중 오차 보정을 위하여 홀센서들은 1kHz의 샘플링 주파수로 홀센서 데이터를 디지털 변환시킨다. 오
차 추정 및 보정 방법은 3장에서 설명하도록 하겠다. 기타 모바일 로봇의 상세 구성 및 사양은 표 1, 2와 같다.
3. 위치 오차의 추정과 보정 방법
3.1 위치 오차의 추정
홀센서를 이용한 위치 오차 추정은 모바일 로봇 바닥면 에 부착된 4개의 홀센서 출력값을 통해 이루어진다. 홀센 서는 홀효과에 원리를 두며 로봇이 이동하는 테스트베드 바닥의 마그네틱 랜드마크에서 발생하는 자기장의 영향을 받는다
[11]
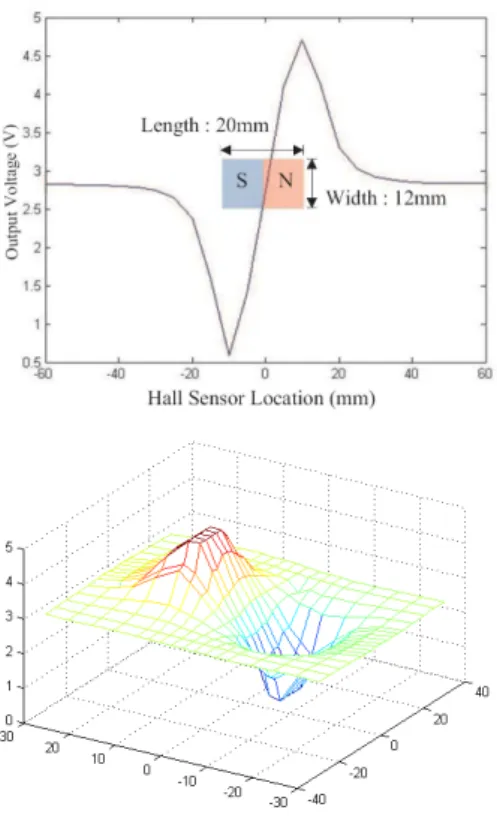
. 로봇의 위치에 따라 각각의 홀센서는 자기장의 영향에 대해 그림 4와 같이 구간 선형적인 전압을 출력한 다. 이를 이용하여 홀센서 출력값에 따른 오차 추정 방법 을 설명하고 수식으로 나타내도록 하겠다.그림 4. Hall sensor output voltage
3.1.1 위치 오차 추정의 전제 조건
자석 표면과 홀센서 사이의
z방향 거리를 일정하게 유
지하고x방향으로 홀센서를 이동시킬 경우 자석의 자기장
에 대한 홀센서 출력전압은 그림 4와 같다. 그림에서 알 수 있듯이 자석 중심에서 N, S극의 영향이 상쇄 되어 약 2.5V(offset voltage)의 전압이 출력되고 자석 양 극 모서리 에서 각각의 자극 영향이 최대로 작용하여 N극 모서리에 서 최대 전압, S극 모서리에서 최소 전압이 출력된다. 또한 양 극 모서리 사이에 홀센서가 존재할 경우 거리에 따른 전압 출력값이 모두 다르며 거리에 따라 홀센서 출력이 거 의 구간 선형에 근접함을 확인할 수 있다. 이 특징적인 선형 구간을 위치 오차 추정에 사용하며 모바일 로봇의 위치 인식을 위해 다음과 같은 조건을 가정한다. 또한, 그림 4에 서 보여지듯이 사용된 자석의 자기장 영역은 자석 중심부 로부터 최대 20mm 로 추정할 수 있다.
A. 모바일 로봇은 테스트베드 내의 각 마그네틱 랜드마크 좌표를 저장하고 있으며 이상적인 이동 경로는 랜드마 크가 구성하는 그리드 맵(grid map)상에 존재한다.
B. 모바일 로봇은 테스트베드 내에서 오도메트리를 통해 로봇 중심의
x, y, θ좌표를 알 수 있으며 마그네틱 랜드
마크를 인식함으로써 절대 좌표 인식이 가능하다. C. 마그네틱 랜드마크의 배치는 모바일 로봇이 이웃한 두랜드마크 사이의 최단 거리를 이동할 때 발생하는 오 도메트리 최대 오차
x e
, ye
가 자석의 너비의 반(w/2)보 다 작도록 간격을 설정한다.앞에서 언급한 가정을 전제로 모바일 로봇은 테스트베 드 내의 각 랜드마크 사이를 이동하며 오도메트리(odo- metry)를 기반으로 위치를 인식한다. 이동 중 오도메트리 (odometry)에서 오차가 발생할 수 있으며 이러한 경우 모 바일 로봇은 랜드마크로 구성된 그리드 맵(grid map) 상의 경로에서 벗어나게 된다. 이 때 오도메트리(odometry)가 가 지고 있는 위치 정보는 부정확하며 모바일 로봇은 근접한 랜드마크로 이동하여 홀센서를 통해 랜드마크 좌표에 대 한 로봇 중심의 좌표를 추정함으로써 오도메트리(odo- metry) 오차를 제거하고 보다 정확한 위치를 인식할 수 있다.
3.1.2 위치 오차 추정 방법
본 논문에서 제안하는 모바일 로봇의 위치 오차 추정은 마그네틱 랜드마크에 대한 로봇 중심의 좌표 인식을 기반 으로 한다. 그림 5와 같이 자석으로 구성된 마그네틱 랜드 마크 주변의 임의의 위치에 앞서 말한 가정에 따라 모바일 로봇이 존재할 경우 4개의 홀센서는 각각 전압 V
1
, V2
, V3
,V 4
를 출력한다. 4 개의 자석들은 랜드마크 중심점에서 일 정 거리(d=50mm)로 떨어진 위치에 90도의 각도 차이로 배 치되기 때문에, 그림 6에서 보여지듯이 각각의 자석의 구 간 선형 출력 특성을 유지하고 있다. 따라서 홀센서로부터 측정된 전압은 그림 4와 같이 홀센서와 자석 사이의 거리 에 따른 전압 출력 관계를 통해 자석의 세로 방향과 평행 한 중심축으로부터 각 홀센서까지의 최단거리로 표현이 가능하다. 따라서 l1
, l2
, l3
, l4
는 다음과 같다., 1, 2, 3, 4
i i i
l
=k V i
= (1)그림 5. Pose error estimation using magnetic landmark
그림 6. Magnetic field of landmark that is formed by four magnets
이 거리를 이용하여 랜드마크 원점에 대한 로봇 중심의 좌표를 구할 수 있으며 이것은 랜드마크 원점에서 로봇 중 심이 벗어난 정도와 같고 다음과 같이 표현된다.
2 4
e
2l l
x
+= (2)
1 3
e
2l l
y
+= (3)
1 4 2 1 1 3
sin ( ) sin ( )
e
l l
l l
d d
θ
= − − = − −
(4)모바일 로봇은 이동 경로 상에 존재하는 랜드마크에서 이 좌표를 추정하여 오도메트리(odometry) 오차를 보정함 으로써 보다 정확한 위치 인식이 가능하다
[12]
.3.2 위치 오차의 보정
테스트베드 내의 모바일 로봇은 홀센서를 통해 오차를 추정한 후 다음의 오차 보정 방법을 통해 그리드 맵(grid map) 상의 이상적인 경로로 복귀가 가능하다. 오차 보정 방법은 정위치 오차 보정과 이동 중 오차 보정이 있다.
3.2.1 정위치 오차 보정
정위치 오차 보정은 마그네틱 랜드마크 주변에 로봇이 멈춰 있을 경우 랜드마크 중심에서 벗어난 오차를 추정한 후 오차( x
e
, ye
,θ e
)만큼 이동함으로써 랜드마크 중심으로 복귀하여 오차를 보정하는 방법이다. 모바일 로봇은 오차 추정 후 오차 보정을 위해 그림 7과 같이 x, y,θ 방향에 대
해 순차적으로 이동한다[13]
.그림 7. Pose error compensation
3.2.2 이동 중 오차 보정
정위치 오차 보정은 정확한 위치 오차 추정의 장점이 있으나 이를 위해서는 항상 랜드마크 위에서 멈춰 오차를 추정한 후 보정이 이루어져야 하며 로봇이 연속적으로 경 로를 이동하는 경우 비효율적일 수 있다. 이를 보완하기 위하여 본 논문에서는 정위치 오차 보정과 함께 모바일 로 봇이 그리드 맵(grid map) 상의 랜드마크를 지나며 멈추지 않고 오차를 보정할 수 있는 방법을 개발하였다. 이 방법 은 모바일 로봇이 이동 중 마그네틱 랜드마크의 자기장을 연속적으로 검출하여 랜드마크의 중심에서 발생하는 자기 장을 인식하게 되면 랜드마크 중심 좌표에 대한 로봇의 위 치 오차를 추정하여 오도메트리(odometry) 오차를 제거하 고 다음 랜드마크의 중심에 도달할 수 있는 새 경로를 실 시간으로 생성함(경로 설정 및 추종)으로써 이루어진다.
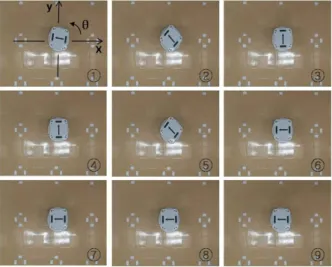
모바일 로봇이 그림 8과 같이 랜드마크를 지나는 동안 그
그림 8. Pose error estimation while the robot moving
그림 9. The hall sensors output that pass through the magnetic landmark upside
그림 10. The path tracking for the pose error compensation 림 9의 홀센서 출력을 인식하며 이를 바탕으로 오차를 추
정한다. 이와 동시에 모바일 로봇이 이동해야 하는 목표지 점을 향해 새로운 경로를 생성한다. 경로 설정 및 추종에 대한 다양한 방법이 있지만, 로봇의 속도와 각속도를 이용 한 빠른 경로 설정 방법을 고려하였다. 그림 10과 같이 오 차를 추정한 동시에 모바일 로봇은 자신의 위치 정보를 바 탕으로 수정한 위치로부터 참조 경로(reference trajectory)로 복귀하여 목표점에 진입할 수 있는
S자 형태의 추종 경로
를 생성하며, 이 경로를 따라 이동하여 오차를 보정하게 된다[14]
. 모바일 로봇의 동역학은 다음과 같이 표현되며,( )
2
w
c r l
v
=r ω
+ω
(4)( )
w
c r l
w
r
ω
=d ω ω
− (5)모바일 로봇의 위치는 다음 수식을 통해 알 수 있다
[14]
.1
[sin(1
) sin( )]k k c k k
c c c c
c
x x v θ θ
ω
+
= ++
− (6)1
[cos(1
) cos( )]k k c k k
c c c c
c
y y v θ θ
ω
+
= ++
− (7)1
k k
c c c t
θ +
=θ
+ Δω
(8)if ω c
= 01
cos( )k k k
c c c c
x +
=x
+ Δv t θ
(9)1
sin( )k k k
c c c c
y +
=y
+ Δv t θ
(10)1
k k
c c
θ +
=θ
(11)모바일 로봇의 동역학적 특성에 기반하여 오차 보정을 위한 경로 생성식은 다음과 같다. 경로를 생성하는 각 원
그림 11. Pattern of magnet arrangement
그림 12. Characteristic of each magnetic landmark 의 반지름 r
1 , r 2
는 모바일 로봇의 이동 속력 vc
와 각속도ω
c
에 의해 아래의 식과 같으며,1,2 c
c
r v
=
ω
(12)다음과 같은 참조 경로(reference trajectory)를 갖는다.
( )
g s
ref c s s
g s
y y
y x x y
x x
= − − +
− (13)
모바일 로봇은 최종적으로 다음의 두 점에 중심을 두고 접하는 두 원
r 1 , r 2
의 연결된 호를 따라 참조 경로(reference trajectory)로 복귀하여 목표점에 도달할 수 있다.2 2
1 1
1 2
( tan ) (1 tan ) 1 tan
e e
r e
e
a r
x x θ θ
θ
= + +
+ (14)
2 1 1
1 2 2
1
( tan ) ( tan ) (1 tan )
e
r e
e e
y y b r r
θ
θ θ
= +
+ (15)
2 2
2 2
2 2
( tan ) (1 tan ) 1 tan
c c
r c
c
a r
x x θ θ
θ
= + +
+ (16)
2
2 2
2 2 2
2
( tan ) ( tan ) (1 tan )
c
r c
c c
y y b r r
θ
θ θ
= +
+ (17)
1 1 2 2 1 1 2 2
(a =1, b =-1, a =-1, b =1 or a =-1, b =1, a =1, b =-1)
4. 전역 위치 인식
본 논문에서 제안하는 전역 위치 인식(Global Localizaion)은 앞서 설명한 위치 오차 추정 및 보정 방법과 다음에서 설명할 랜드마크 인식, 전역 위치 인식을 기반으 로 한다. 모바일 로봇은 이동 공간 내에서 절대 위치를 추 정하기 위해 3개의 연속된 랜드마크를 인식한다.
4.1 마그네틱 랜드마크 형성과 인식 방법
본 연구에서 개발한 마그네틱 랜드마크는 4개의 막대자 석으로 구성되며 정사각형 형태로 배치하여 하나의 랜드 마크를 형성한다. 막대형 자석은 항상 N극과 S극을 쌍으 로 가지기 때문에 4개의 자석을 정사각형 형태로 배치할
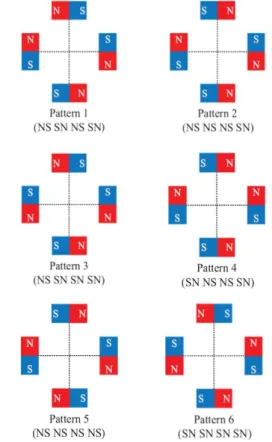
경우 순열에 의해 총 여섯 개의 서로 다른 자기장 특성을 갖는 랜드마크를 형성할 수 있다. 상기 언급한 여섯 개의 마그네틱 랜드마크는 그림 11과 같이 각각 NS SN NS SN (패턴 1), NS NS NS SN(패턴 2), NS SN SN SN(패턴 3), SN NS NS SN(패턴 4), NS NS NS NS(패턴 5), SN SN SN SN(패턴 6)으로 표현된다. 여기서 패턴 5와 패턴 6의 경우 는 자극 배열의 대칭에 의해 거의 동일한 특성을 보이므로 동일한 랜드마크로 간주하며 따라서 모바일 로봇의 전역 위치 인식(Global Localization)을 위한 랜드마크는 패턴 1, 패턴 2, 패턴 3, 패턴 4, 패턴 5로 총 5종류가 사용된다.
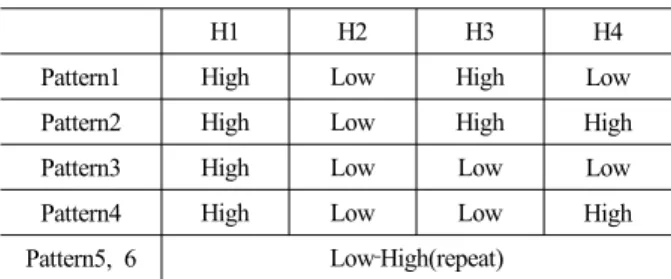
각각의 마그네틱 랜드마크로부터 측정된 자기장에 절대 값을 취하면 그림 12에서와 같이 구별 가능한 고유한 자기 장 특성을 보여준다. 모바일 로봇은 랜드마크 인식을 위해 각 랜드마크 위에서 1회전을 하며 랜드마크에서 발생하는
그림 13. Global Localization 그림 14. Algorithm of Global Localization 자기장을 감지한다. 1회전 중 4개의 홀센서(H1, H2, H3,
H4)는 표 3과 같이 랜드마크를 구분할 수 있는 전압 출력 을 갖는다.
H1 H2 H3 H4
Pattern1 High Low High Low
Pattern2 High Low High High
Pattern3 High Low Low Low
Pattern4 High Low Low High
Pattern5, 6 Low‐High(repeat) 표 3. Recognition data of magnetic landmarks
4.2 전역 위치 인식
모바일 로봇은 공간 내에서 절대 위치를 추정하기 위하 여 랜드마크들을 인식하고, 이를 미리 저장되어 있는 맵 정보와 비교하여 현재의 위치 정보를 획득한다. 제안한 방 법은 최대 6 가지의 랜드마크를 배치하여 맵을 생성하기 때문에 맵이 넓은 영역으로 확장될수록 반복되는 랜드마 크도 증가될 것이다. 따라서 제안된 위치 추정 방법의 성 능은 랜드마크의 탐색 수 및 탐색 패턴의 형태와도 밀접한 관련이 있다. 본 논문에서는 마그네틱 랜드마크를 이용한 새로운 전역 위치 인식 방법에 대하여 설명하기 위하여 랜 드마크의 탐색 수 및 탐색 패턴을 간략화하였다. 모바일 로봇은 그림 13과 같이 ‘ㄱ’ 모양의 연속된 랜드마크 패턴 이 맵 상에 하나씩만 존재 할 경우, ‘ㄱ’ 자 모양으로 연속 된 3개의 랜드마크를 모두 인식함으로써 현재의 위치를 알 수 있다.
모바일 로봇이 랜드마크를 탐색하여 첫번째 랜드마크를
인식하게 되면 ‘ㄱ’ 자를 구성하는 연속된 랜드마크 패턴 의 나머지 2개의 랜드마크를 인식함으로써 작업 공간 내 의 전역 위치를 알 수 있다. 두번째 랜드마크 인식은 첫번 째 랜드마크를 인식한 후 현재의 랜드마크 중심에 대한 모 바일 로봇의 중심 오차( x
e
, ye
, θe
)를 3장에서 설명한 위치 오차 추정 및 보정 방법을 통해 보정한 후 이루어진다. 이 것은 다음 랜드마크 인식의 신뢰도를 높이기 위하여 다음 랜드마크로 이동 시 랜드마크의 중심에 보다 가깝게 도달 하기 위해서이다. 마찬가지로 세 번째 랜드마크 인식은 두 번째 랜드마크 인식 후 위치 오차를 보정하고 다음 랜드마 크로 이동하여 이루어진다. 모바일 로봇이 ‘ㄱ’자 형태의 3개의 랜드마크를 모두 인식하게 되면 저장되어 있는 랜 드마크 맵 정보와 비교하여 현재의 위치를 알 수 있다.[15]
예를 들어 그림 13에서 모바일 로봇의 위치는 다음의 과정을 통해 추정된다. 먼저 모바일 로봇은 첫 번째 랜드 마크 탐색을 통해 패턴 2의 마그네틱 랜드마크를 인식한 다. 그리고 위치 오차를 보정하고 직선방향으로 이동하여 패턴 2라는 두 번째 마그네틱 랜드마크를 인식한다. 마찬 가지로 위치 오차를 보정하고 ‘ㄱ’방향으로 이동을 위해 90도를 회전하여 세 번째 랜드마크로 이동한다. 마지막으 로 세 번째 마그네틱 랜드마크가 패턴 4임을 인식함으로 써 모바일 로봇은 현재의 위치가 ( x
i
, yi
, θi
)임을 추정한다.이러한 전역 위치 인식(Global Localization)과정은 그림 14 과 같이 랜드마크 탐색, 위치 오차 추정 및 보정, 랜드마크 인식을 통합하여 하나의 알고리즘으로 구성하였다.
그림 15. GUI and Testbed for global localization
r x r y r θ
Mean 88% 86% 87%
표 4. Error compensation rate
100(%) , , ,
: , :
i i
i i
i i
e e
r i x y
e
e e
′
θ
= − × =
′
보정 전 오차 보정 후 오차
x y θ
Max error
(Absolute value) 0.5 1.5 1.14
Mean error 0.23 0.66 0.31
표 4. Remaining error after compensation[mm, °]
그림 16. Global Localization
5. 실 험
본 논문에서 제안하는 전역 위치 인식(Global Local- ization)은 위치 오차 추정 및 보정과 마그네틱 랜드마크 인 식을 기반으로 한다. 이 실험은 랜드마크 탐색을 시작으로 4장에서 설명한 전역 위치 인식(Global Localization) 알고 리즘을 따라 작업 공간 내에서 모바일 로봇이 자신의 위치 를 인식하는 일련의 과정을 진행하였다. 실험 진행 및 모 바일 로봇의 상태 확인을 위하여 그림 15의 MFC 기반의 GUI를 제작하였다.
모바일 로봇은 테스트베드의 임의의 점에서 위치 정보 없이 이동을 시작하며 그림 15의 랜드마크 탐색을 통해 첫 번째 랜드마크를 인식한다. 이 후 알고리즘에 따라 3개의 연속된 랜드마크 패턴을 인식하여 위치를 추정한다. 그림 16의 모바일 로봇은 첫 번째 랜드마크 인식 후 랜드마크 패턴 정보를 저장하였고 3장에서 설명한 오차 추정 및 보 정을 통해 다음 랜드마크 중심으로 이동하였다. 그리고 두 번째, 세 번째 랜드마크를 모두 인식한 후 연속된 마그네 틱 랜드마크 패턴 정보를 맵 정보와 비교하여 현재의 위치 를 추정하였다.
실험 결과 모바일 로봇은 표 4의 오차 보정률을 보이며
웨이포인트로 삼는 랜드마크 중심에 평균 1mm 의 오차 범 위로 도달하였으며 연속된 3개의 랜드마크를 인식함으로 써 절대적인 위치 추정 및 목표점 도달이 가능하였다.
6. 결 론
본 논문에서는 실제 모바일 로봇에 적용 가능한 전역 위치 인식(Global Localization) 방법을 제안하였다. 마그네 틱 랜드마크를 사용하는 것을 특징으로 하며 이를 이용한 위치 오차 추정 및 보정, 랜드마크 인식 등 본 연구의 핵심
적인 기반 기술 및 이를 통합한 하나의 전역 위치 인식 (Global Localization) 알고리즘을 개발하였다. 또한 개발된 알고리즘을 실제 모바일 로봇에 적용하였고 실험 결과를 통해 모바일 로봇 스스로 작업 공간상에서 절대적인 위치 를 인식할 수 있음을 확인하였다. 현재 첫 번째 랜드마크 탐색 방법 개선과 전역 위치 인식을 위한 랜드마크 맵 생 성을 위한 연구가 진행 중이며 향후 이 연구를 통해 보다 완성도 높은 전역 위치 인식(Global Localization) 알고리즘 을 개발할 수 있을 것이다.
참 고 문 헌
[1] J. Borenstein, Liqiang Feng, “Measurement and Correc- tion of Systemmatic Odometry Errors in Mobile Robots,”
IEEE Transactions on Robotics and Automation, Vol.12, No.6, pp.869‐880, 1997.
[2] A. Martinelli, “The Odometry Error of a Mobile Robot With a Synchronous Drive System,” IEEE Transactions on Robotics and Automation, Vol.18, No.3, pp.399- 405, 2002.
[3] J. J. Leonard and H. F. Durant‐Whyte, “Mobile Robot Localization by Tracking Geometric Beacons,” IEEE Transactions on Robotics and Automation, Vol.7, No.3, pp.367‐382, 1991.
[4] F. Dellaert, D. Fox, W. Burgard, S. Thrun, “Monte Carlo Localization for Mobile Robots,” Proceedings of the 1999 IEEE International Conference on Robotics and Automation, pp.1322‐1328, 1999.
[5] P. Jensfelt and S. Kristensen, “Active Global Local- ization for a Mobile Robot Using Multiple Hypothesis Tracking,” IEEE Transactions on Robotics and Auto- mation, Vol.17, No.5, pp.748‐760, 2001.
[6] A. Gasparri, S. Panzieri, F. Pascucci, and G. Ulivi, “A Hybrid Active Global Localisation Algorithm for Mobile Robots,” 2007 IEEE International Conference on Robotics and Automation, pp.3148‐3153, 2007.
[7] S. Se, D. Lowe, and J. Little, “Global localization using distinctive visual features,” 2002 IEEE/RSJ International Conference on Intelligent Robots and System, pp.226‐231, 2002.
[8] K. KODAKA, H. NIWA, Y. SAKAMOTO, M. OTAKE, Y. KANEMORI, S. SUGANO, “Pose Estimation of a Mobile Robot on a Lattice of RFID Tags,” 2008
IEEE/RSJ International Conference on Intelligent Ro- bots and Systems, pp.1385‐1390, 2008.
[9] S. S. Han, H. S. Lim, and J. M. Lee, “An Efficient Localization Scheme for a Differential‐Driving Mobile Robot Based on RFID System,” IEEE Transaction on Industrial Electronics, Vol.54, No.6, pp.3362‐3369, 2007.
[10] J. Huh, W. S. Chung, S. Y. Nam and W. K. Chung,
“Mobile Robot Exploration in Indoor Environment Using Topological Structure with Invisibe Barcodes,”
ETRI Journal, Vol.29, No.2, pp.189‐200, 2007.
[11] E. H. Hall, “On an New Action of the Magnet on Electric Currents,” American Journal of Mathematics, Vol.2, pp.287‐292, 1879.
[12] B. S. Kim, B. J. Choi, S. M. Jin, H. P. Moon, J. C.
Koo, W. K. Chung and H. R. Choi, “Development of Position Correction Technique for Mobile Robot using Magnet Hall Sensor,” The 5th International Conference on Ubiquitous Robots and Ambient Intelligence 2008, pp.173‐178, 2008.
[13] B. J. Choi, B. Kim, S. M. Jin, J. C. Koo, W. K.
Chung, H. R. Choi, and H. Moon, “Magnetic land- mark‐based position correction technique for mobile robots with hall sensors,” Intelligent Service Robotics, Vol.3, No.2, pp.99‐113, 2010.
[14] K. C. Koh and H. S. Cho, “A Smooth Path Tracking Algorithm for Wheeled Mobile Robots with Dynamic Constraints,” Journal of Intelligent and Robotics System, Vol.24, pp.367‐385, 1999.
[15] B. J. Choi, B. S. Kim, J. Y. Chun, H. P. Moon, J. C.
Koo, W. K. Chung and H. R. Choi, Magnetic Patterns based Global Localization for a Mobile Robot using Hall Sensors,” Proceedings of the 2009 IEEE Inter- national Conference on Mechatronics and Automation 2009, pp.192‐197, 2009.
김 범 수
2008 성균관대학교 기계공학 부(공학사)
2010 성균관대학교 기계공학 부(공학석사)
2010~현재 LIG 넥스원 연구원 관심분야 : Muti‐robot system,
SLAM, Localization
최 병 준
2003 성균관대학교 기계공학 부(공학사)
2005 성균관대학교 기계공학 부(공학석사)
2005~현재 성균관대학교 기계 공학부 박사과정 관심분야 : Muti‐robot system, Cooperation, SWARM,
Path planning & Task allocation algorithm
유 원 석
2009 성균관대학교 기계공학 부(공학사)
2009~현재 성균관대학교 기 계공학부 석사과정 관심분야 : Muti‐robot system,
SLAM, Localization
문 형 필
1996 포항공과대학교 기계공 학과(공학사)
1998 포항공과대학교 기계공 학과(공학석사)
2005 Univ. of Michigan(공학박 사)
2005~2007 Carnegie Mellon Univ. Post‐doctoral Fellow 2008~현재 성균관대학교 기계공학부 조교수 2009~현재 URAI2009 Publication chair 관심분야 : Mobile Robot, Biomimetic Robot
구 자 춘
1989 한양대학교 기계공학과 (공학사)
1992 University of Texas Sys- tem Identification & Con- trol(석사)
1997 University of Texas Dy- namic systems Modeling & Simulation(박사) 1997~1999 삼성 Information Systems America Staff
Engineer
1999~2001 IBM Storage Systems Division Advisory Engineer
2001~현재 성균관대학교 교수
관심분야 : Modeling and simulation of physical sys- tems, Precision Mechatronic System, Compu- tational mechanics, Sensors & Actuators
최 혁 렬
1984 서울대학교 기계공학과 (공학사)
1986 한국과학기술원 기계공 학과(공학석사)
1994 포항공과대학교 기계공 학과(공학박사)
1986~1989 LG전자 정보기술 연구소 주임연구원 1993~1995 일본정부 문부성 초청 동경대학 연구원 1999~2000 일본 AIST 초빙 연구원
1995~현재 성균관대학교 기계공학부 교수
2005~현재 IEEE Transaction onRobotic Associate Editor
관심분야 : Field Robotics, Dexterous hand, Haptic display, Artificial muscle actuator