https://doi.org/10.7848/ksgpc.2019.37.3.109
개선된 개미 군집 최적화를 이용한 고해상도 위성영상에서의 객체 기반 도로 추출
Object-Based Road Extraction from VHR Satellite Image Using Improved Ant Colony Optimization
김한세1) · 최강혁2)· 김용일3)· 김덕진4)· 정재준5)
Kim, Han Sae · Choi, Kang Hyeok · Kim, Yong Il · Kim, Duk-Jin · Jeong, Jae Joon
Abstract
Road information is one of the most significant geospatial data for applications such as transportation, city planning, map generation, LBS (Location-Based Service), and GIS (Geographic Information System) database updates. Robust technologies to acquire and update accurate road information can contribute significantly to geospatial industries. In this study, we analyze the limitations of ACO (Ant Colony Optimization) road extraction, which is a recently introduced object-based road extraction method using high-resolution satellite images. Object-based ACO road extraction can efficiently extract road areas using both spectral and morphological information. This method, however, is highly dependent on object descriptor information and requires manual designations of descriptors. Moreover, reasonable iteration closing point needs to be specified.
In this study, we perform improved ACO road extraction on VHR (Very High Resolution) optical satellite image by proposing an optimization stopping criteria and descriptors that complements the limitations of the existing method. The proposed method revealed 52.51% completeness, 6.12% correctness, and a 51.53% quality improvement over the existing algorithm.
Keywords : Object-Based, Road Extraction, Ant Colony Optimization, VHR Satellite Images
초 록
도로 정보는 교통, 도시 계획, 지도 갱신, 위치기반서비스 그리고 GIS (Geographic Information System) 데이터
구축 등에 활용되는 중요한 기초 공간정보 자료이다. 따라서 정확한 도로 정보를 획득하고 이를 갱신하는 것은 다
양한 공간정보 산업에 중요한 역할을 수행할 수 있다. 본 연구에서는 고해상도 위성영상에서 객체 기반의 도로 추
출 기법으로 최근 소개된 개미 군집 최적화(ACO: Ant Colony Optimization)의 한계점을 분석하고 이를 개선하
고자 하였다. 객체 기반의 ACO 도로 추출은 도로의 분광 및 형상 정보를 모두 활용하여 효과적으로 도로 추출
을 수행할 수 있으나 객체 서술자 정보에 의존적이며 서술자 계산 시 사용자의 개입이 필요하다. 또한, 최적화 반복
종료 시점의 설정이 모호하다는 단점이 존재한다. 따라서 본 연구에서는 이를 개선하기 위해 기존 서술자의 한계
를 보완하는 서술자와 최적화 반복 종료기준을 제안하였다. 제안된 방법은 기존의 알고리즘보다 52.51%의 완성도
(completeness), 6.12%의 정확도(correctness), 51.53%의 품질(quality) 향상을 나타내었다.
핵심어 : 객체 기반, 도로 추출, 개미 군집 최적화, 고해상도 위성 영상
Original article
Received 2019. 05. 09, Revised 2019. 05. 18, Accepted 2019. 05. 24
1) Member, Dept. of Civil and Environmental Engineering, Seoul National University (E-mail: [email protected]) 2) Member, Dept. of Civil and Environmental Engineering, Myongji University (E-mail: [email protected])
3) Corresponding Author, Member, Dept. of Civil and Environmental Engineering, Seoul National University (E-mail: [email protected]) 4) Member, School of Earth and Environmental Sciences, Seoul National University (E-mail: [email protected])
5) Member, Dept. of Geography. Sungshin Women’s University (E-mail: [email protected])
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium,
1. 서 론
도로정보는 교통 관리, 도시 계획, 위치기반 서비스 등의 다 양한 분야에 기초 자료로 활용되며, 정확한 도로정보는 관련 산업의 신뢰도를 높일 수 있다. 위성 및 항공영상을 이용한 도 로정보 추출은 넓은 지역의 최신 도로정보를 취득할 수 있는 장점이 있어 다양한 관련 연구가 지속적으로 수행되고 있다.
특히, 최근 고해상도 위성 또는 항공영상의 활용성이 증대됨 에 따라 이를 이용하여 도로를 추출하는 다양한 연구가 진행 되고 있다.
고해상도 위성 또는 항공영상을 활용한 도로정보 추출은 크게 수동 및 자동화 기법으로 나누어 볼 수 있다. 수동적인 방식은 상대적으로 도로정보의 정확도 확보에는 유리하지만, 제작 및 갱신에 많은 시간과 높은 경제적인 비용이 요구되는 한계가 존재한다(Dal et al ., 2012). 반면, 자동화 기법은 수동 기법에 비하여 효율적으로 도로 추출이 가능하지만, 현실적 으로 활용될 수 있는 수준의 정확도를 확보하지 못하고 있다 (Das et al ., 2011; Miao et al ., 2015; Li et al ., 2016). 따라서 고 해상도 위성 및 항공영상을 활용한 자동화된 도로 추출 기법 에 관한 연구의 필요성이 증대되고 있다.
위성영상을 이용한 도로 추출은 주로 영상 분류(image classification)를 활용하여 수행되며(Das et al ., 2011) 화소 기 반과 객체 기반의 방법으로 나뉠 수 있다. 화소 기반의 도로 추출은 영상에서 도로의 분광적 특징을 나타내는 화소를 도 로 클래스로 분류하는 방법이며 객체 기반의 도로 추출은 유 사한 분광 정보를 나타내는 화소들을 객체(segment)로 분할 하고 객체 단위의 도로 클래스를 분류하는 방법이다. 화소 기 반의 도로 추출의 연구는 신경망(neural network), 최대우도 (maximum likelihood), SVM (Support Vector Machine) 등의 분류자를 이용하여 수행되어왔다(Miao et al ., 2015). Yager and Sowmya (2003)은 영상의 에지 정보를 활용하여 SVM 분류자로 도로 추출을 수행한 바 있으며 Zhou et al . (2006) 은 최대우도 분류자를 활용한 도로 추출을 수행하였다. 또한, Kirthika and Mookambiga (2011)은 화소 기반의 분광 및 질 감 정보를 활용하여 신경망을 훈련시켜 도로의 중앙선을 추 출한 바 있다. 하지만 화소기반의 도로 추출은 영상에 나타나 는 노이즈에 큰 영향을 받으며 고해상도 영상에서 오분류 확 률이 높다는 단점이 존재한다(Fauvel et al ., 2008).
반면, 객체 기반의 도로 추출은 화소의 집합인 객체 단위 로 수행되기 때문에 영상의 노이즈에 상대적으로 영향을 적 게 받으며 처리해야 하는 정보를 단순화시켜 큰 영상에서도 효율적으로 도로를 취득할 수 있는 장점이 있다. 또한, 객체
기반의 도로 추출은 객체의 기하 및 구조적 특징을 이용할 수 있으며 기존의 연구에서 도로 추출의 정확도를 확보하기 위 해 도로의 기하 및 구조적 특징을 활용하는 것은 그 중요성 을 검증한 바 있다(Baltsavias, 2004; Huang et al ., 2007). 따 라서 객체 기반의 도로 추출은 화소 기반 분석에 비해 높은 정확도를 나타내며 고해상도 영상에서 도로 추출 방법으로 그 성능을 검증받아왔다(Blaschke, 2010; Myint et al ., 2011;
Miao et al ., 2015). 객체 기반의 도로 추출은 영상 분할(image segmentation)을 수행하여 공간 객체 단위의 정보를 획득하 고 분류자를 통하여 도로 클래스를 분류하는 방법으로 다 음과 같이 다양한 영상 분할 기법과 분류자를 통한 도로 추 출 연구가 진행되어 온 바 있다. Huang and Zhang (2009)는 FNEA (Fractal Net Evolution Approach)기법으로 영상 분할 후 binary SVM 분류자를 사용하여 도로를 추출한 바 있으며 Grote et al . (2012)은 노말라이즈 컷(normalized cut) 영상 분 할 후 퍼지 규칙(fuzzy rule) 기반으로 도로 객체를 분류하였 다. Miao et al . (2015)은 SRM (Statistical Region Merging)으 로 영상 분할 후 SVM 분류자로 도로 추출을 수행하였으며 Li et al . (2016)은 BPT (Binary Partition Tree)로 영상 분할 후 퍼 지 규칙을 적용하여 도로를 분류하였다.
한편, 개미 군집 최적화(ACO: Ant Colony Optimization) 알고리즘을 도로 추출에 적용하고자 하는 연구들이 수행되 어왔다 . ACO는 주로 순회 세일즈맨 문제(TSP: Travelling Salesman Problem), 에지 탐지(edge detection), 영상 분할과 같은 알고리즘의 설계에 활용되어왔으며 네트워크 기반의 문 제 해결에 우수한 성능을 보이며 도로 네트워크 추출 알고리 즘으로서의 적용 가능성을 검증해왔다(Maboudi et al ., 2018).
Zarrinpanjeh et al .(2013)은 도로정보를 갱신하기 위한 ACO 의 프레임워크를 처음 제안하였으며 Yin et al .(2015)은 영상 분할 후 객체의 폴리곤과 에지 정보를 활용한 ACO 도로 추 출 방법을 제안하여 e-Cognition에서 제공하는 객체 기반 분 류의 도로 추출에 비해 약 40%의
-score를 향상시킨 바 있 다. Maboudi et al .(2017)은 이후 고해상도 위성영상을 MRS (Multi-Resolution Segmentation)로 영상 분할하여 도로의 특성을 나타내는 객체 서술자를 계산하고 이를 ACO의 경험 정보로 활용하여 MARS (Multivariate Adaptive Regression Splines), Geodesic, SVM, Principal Curve 알고리즘과의 도 로 추출결과 비교를 통해 우수성을 검증하였다.
그러나 기존 문헌에 소개된 ACO 도로 추출 방법은 다음
과 같은 한계점을 가지고 있다. 첫째로, 알고리즘 내에서 도
로 객체 탐지의 전제가 되는 도로의 특징이 부족하여 보다 정
확한 도로정보의 획득을 위해 다양한 도로의 특징을 고려하
여야 한다. 둘째로, 객체 서술자 계산과 최적의 파라미터 선정 등에서 사용자의 개입을 필요로 한다. 마지막으로, 도로 추출 의 정확도가 알고리즘의 반복 횟수에 영향을 받기 때문에 반 복 종료기준의 설정이 필요하다. 따라서 본 연구에서는 위와 같은 한계점을 개선하여 고해상도 위성영상에서의 객체 기반 도로 추출 기법으로 개선된 ACO 도로 추출 알고리즘을 제안 하고자 한다. 이를 위하여 다양한 도로의 특징을 반영하는 객 체 서술자를 제안하여 추가적으로 활용하고자 하며 최적 파 라미터 선정 및 반복 종료기준을 설정하여 사용자 개입을 최 소화하고자 한다. 본 논문은 다음과 같은 순서로 구성되어 있 다. 2장에서는 기존연구의 도로 추출의 한계와 이를 개선하기 위해 본 연구에서 제안하는 도로 추출의 방법론을 설명한다.
3장에서는 제안하는 방법과 기존 방법의 결과를 평가하여 비 교 분석을 수행한다. 마지막으로 4장에서는 결론과 함께 제안 기법의 한계점 및 향후 연구를 제시한다.
2. 실험 방법
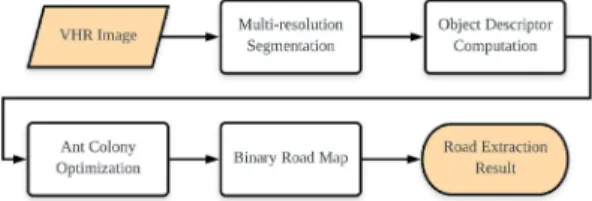
본 연구의 도로 추출의 흐름은 Fig. 1과 같다. 먼저, 고해상 도 위성영상을 MRS로 객체 단위로 분할한다. 다음으로, 객체 정보를 획득하기 위해 각 객체의 도로의 특성을 반영하는 서 술자를 계산한다. 획득한 객체 정보를 ACO 도로 추출에 적용 하여 도로 객체를 탐지하며 탐지된 도로 객체들의 선형 결합 후 이진 영상으로 최종 도로 추출결과를 획득한다.
Fig. 1. Flow chart of road extraction process
2.1 영상 분할
영상 분할의 결과는 이어지는 도로 추출 알고리즘에 적 용되는 단위로 이용되므로 최종 결과에 큰 영향을 미친다 (Maboudi et al ., 2018). ACO 도로 추출은 도로의 탐지에 객 체의 분광 및 구조적 특성을 이용하기 때문에 본 연구에서 는 영상 분할 기법으로서 분광 정보와 형태적 특성을 동시에 활용하는 MRS로 영상 분할을 수행하였다. MRS는 각 픽셀 을 하나의 객체로 취급하여 결합 인자(fusion factor) 안에서 불균일성(heterogeneity)이 최소가 되도록 인접 객체들을 병
합시켜 나가는 상향식 영역 병합(bottom up region merging) 방식의 영상 분할 방법이다. 결합 인자는 Eq. (1)과 같이 색 상 불균일성(color heterogeneity)과 형상 불균일성(shape heterogeneity)의 가중 합으로 표현된다.
(1) where : Heterogeneity, W : Weight of the heterogeneity.
색상 불균일성은 Eq. (2)와 같은 수식으로 표현된다.
B W (2)
where : Number of pixels, : Standard deviation of object’s spectral value, B: Cardinality of the bands set, ,
: First, second, and merged object respectively.
형상 불균일성은 smoothness heterogeneity와 compactness heterogeneity의 가중 합으로 표현되며 이를 구하는 수식은 Eq. (3)과 같다.
W
W (3)
where : Factual length of the object, : Perimeter of minimum bounding box.
2.2 도로 객체 서술자
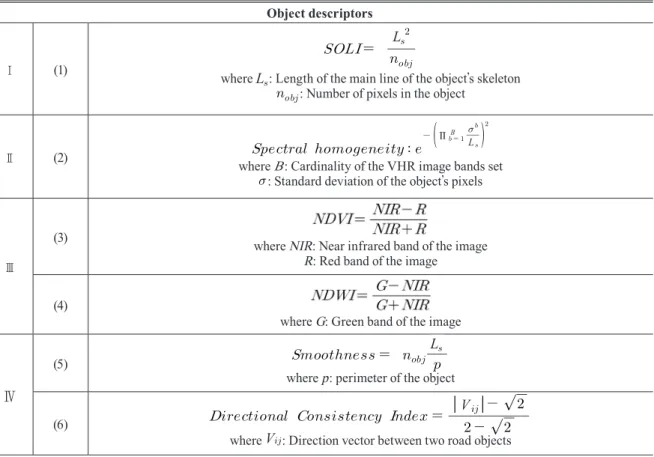
도로 객체 서술자는 영상에서 도로를 구분할 수 있게 하는 구조적, 분광적, 지형적 특성을 반영하는 지표이다(Das et al ., 2011). 고해상도 위성영상에서 도로 객체를 식별하기 위해 서 술자는 다른 객체들에 비해 뚜렷한 대조를 보여야하며 효과 적으로 정의된 서술자는 알고리즘의 결과에 정확성을 높일 수 있다(Maboudi et al ., 2018). 따라서 효과적인 도로 객체 서술 자의 정의를 위해서는 서술자가 나타낼 수 있는 도로의 특성 들을 파악하는 것이 중요하다. 본 연구에서는 Table 1과 같이 기존의 많은 연구에서 공통적으로 사용된 도로의 핵심적인 특성 네 가지를 반영하고자 하였다(Mckeown and Denlinger, 1988; Wang and Newkirk, 1988; Zlotnick and Carnine, 1993;
Mayer and Steger, 1998; Klang, 1998; Katartzis et al ., 2001;
Tupin et al ., 2002; Bentabet et al ., 2003; Das et al ., 2011; Miao et al ., 2015). 본 연구에서 사용한 객체 서술자는 Table 2에 명 시된 여섯 가지 서술자와 같으며 기존 ACO 도로 추출에 사
W
W
용된 객체 서술자인 SOLI (Skeleton-based Object Linearity Index), spectral homogeneity, NDVI (Normalized Difference Vegetation Index, NDWI (Normalized Difference Water Index)와 본 연구에서 추가적으로 고려한 smoothness와 DCI (Directional Consistency Index)로 구분된다. 기존의 서술자 는 도로의 특성 Ⅰ,Ⅱ, Ⅲ만을 반영하며 본 연구에서는 도로 의 특성 Ⅳ를 반영하는 객체 서술자인 smoothness와 DCI를 제안하였다.
Maboudi et al . (2013)에 의해 제안된 SOLI와 spectral ho- mogeneity는 도로의 특성 Ⅰ와 Ⅱ를 효과적으로 반영하는 서 술자이나 SOLI는 도로의 폭을 사용자가 지정해야 하고 도
로 객체 내에서 값의 분포가 크기 때문에 도로 객체와 비도 로 객체의 뚜렷한 구분이 어렵다는 한계를 가진다. 이와 같 은 한계를 개선하기 위하여 본 연구에서는 Eq. (3)으로부터 의 smoothness를 서술자로 이용하여 도로 폭의 수동 지정 필 요성을 개선하고 객체 간 서술자인 DCI를 제안하여 큰 SOLI 값을 보이는 도로 객체들 위주의 탐지를 개선하고자 하였다.
제안하는 ACO 도로 추출 알고리즘에 사용된 객체 서술자 는 Table 2와 같다. SOLI와 smoothness는 최대 최소 정규화 가 수행되었으며 NDVI와 NDWI의 임계치 설정에는 Otsu 임 계치가 사용되었다.
Table 1. Road characteristics Road
characteristics Descriptions
Ⅰ Road structures are mostly elongated.
Ⅱ The surface of road is spectrally homogeneous, with low variations.
Ⅲ Roads are spectrally differentiable with respect to vegetation, water, and man-made structures.
Ⅳ Roads rarely have non-smooth and sharp bent structures.
Table 2. Object descriptors and corresponding road characteristics Object descriptors
Ⅰ (1)
L
where L
: Length of the main line of the object’s skeleton
: Number of pixels in the object
Ⅱ (2)
∏
L
B
where B : Cardinality of the VHR image bands set
: Standard deviation of the object’s pixels
Ⅲ
(3) where NIR: Near infrared band of the image R: Red band of the image (4) where G: Green band of the image
Ⅳ
(5)
L
L
where p: perimeter of the object
(6)
V
where V
: Direction vector between two road objects
2.2.1 DCI
본 연구에서 제안하는 객체 간 서술자인 DCI는 도로 특성
Ⅳ를 반영하며 객체 간의 관계에 대한 서술자로서 단일 객체 에 대한 서술자가 나타내지 못하는 특성을 반영할 수 있다. 이 러한 객체 간의 관계를 고려하는 객체 간 서술자는 이웃하는 객체를 기준으로 도로를 탐지하는 ACO 알고리즘을 효율적 으로 활용할 수 있는 장점이 있다. 두 객체 간의 방향 일관성을 구하기 위해서 먼저 Fig. 2(a)와 같이 각 객체의 방향 벡터를 구한다. 방향 벡터는 각 객체의 이진 영상에 컨벡스 헐(convex hull) 연산을 수행한 외곽선과 주 방향을 기울기로 하는 직 선과의 교점을 지나는 벡터 V V
로 정의된다. V
는 Fig.
2(b)와 같이 정의되며 Eq. (4)와 같이 [ 2]의 범위를 가지 는 각 객체의 방향 벡터에 관한 수식으로 나타난다. 최종적으 로, DCI는 Table 2(6)과 같이 정규화된 서술자로 계산된다.
, (4)
where,
: x coordinate of the center of gravity of the corresponding object
Fig. 2. Computation of direction vector between two road objects (a) Direction vectors for each objects
(b) Direction vector between two road objects
3. 개선된 개미 군집 최적화 도로 추출
ACO 알고리즘은 경험 정보와 페로몬 자취(pheromone trail)에 의해 계산된 이행 규칙(transition rule)에 의해 확률 적으로 더 높은 쪽의 노드(node)를 선택하는 원리를 가진다.
Fig. 3은 Maboudi et al . (2017)과 본 연구에서 제안하는 ACO 도로 추출의 흐름도를 나타낸다.
(a) (b)
Fig. 3. Ant colony optimization flow chart (a) Maboudi et al . (2017) (b) Proposed
Maboudi et al . (2017)에 의해 제안된 ACO 도로 추출 알고 리즘은 도로의 특성을 뚜렷하게 보이는 객체를 효율적으로 탐지해내지만, 다음과 같은 한계점을 가지고 있다. 먼저, 분할 된 개미가 배치(breeding)되는 객체의 수의 설정이 모호하다.
개미가 배치되는 객체의 수는 최종 결과에 중요한 영향을 미 치므로 이에 대한 적절한 설정이 필요하다. 다음으로, 도로 객 체의 탐지가 SOLI에 의존적이다. 따라서 반복 횟수가 늘어날 수록 낮은 SOLI 서술자 값을 가지는 가장자리 객체와 교차로 와 같은 도로 객체의 탐지가 제외된다. Maboudi et al . (2017) 은 ACO가 탐지하는 이웃의 정의를 최 이웃과 그 이웃으로 확 대하여 낮은 SOLI를 가지는 객체들의 탐지를 포함하여 이러 한 한계를 극복하고자 하였으나 이는 비도로 객체의 탐지를 증가시킬 수 있고 두 객체 이상 떨어진 도로는 탐지하지 못하 는 한계점이 존재한다. 마지막으로, 반복 종료의 기준이 명확 하지 않다. 반복 횟수와 정확도가 필연적으로 비례하지 않으 므로 이를 효율적으로 설정하지 못하면 최종 도로 추출결과 의 완성도(completeness)와 정확도(correctness)가 낮아질 수 있다.
본 연구에서는 이러한 한계점을 극복하기 위해 Fig. 3(b)와
같이 개선된 알고리즘을 제안하였다. 개선된 ACO는 개미가
탐지를 시작하는 도로 후보객체(nest objects)를 지정하고 각
도로 후보객체마다 최적화된 도로 추출결과를 얻은 뒤 이를 선형 결합하여 최종 도로 추출결과를 획득한다. 본 연구에서 제안하는 방법을 통해 높은 서술자 값을 나타내는 도로 객체 와 상대적으로 적은 서술자 값을 나타내는 도로 객체와의 페 로몬의 차이를 줄일 수 있으며 가장자리 객체 또한 성공적으 로 탐지해낼 수 있다. 또한, 제안하는 알고리즘 반복 종료기준 을 통해 효율적인 도로 탐지를 수행할 수 있다.
3.1 도로 후보객체 지정과 배치
본 연구에서는 기존에서 도로 추출 정확도 저하의 원인이 었던 가장자리 객체와 교차로 등의 효율적인 탐지를 위하여 탐색 시작 객체를 다음과 같이 지정하였다. 먼저, NDVI와 NDWI의 임계치 이하의 값을 가지는 객체의 경험 정보 값의 분포를 획득한다. 경험 정보 값은 객체 서술자 SOLI, spectral homogeneity, 그리고 smoothness의 곱으로 표현된다. 다음으 로, 0 이상의 경험 정보 값을 가지는 가장자리 객체와 임계치 이상의 경험 정보 값을 나타내는 객체를 도로 후보객체로 지 정한다. 개미는 지정된 도로 후보객체에서 차례로 배치되어 각 도로 후보객체마다 최적화된 도로 객체 탐지 결과를 획득 한다. Fig. 4(a)와 (b)는 각각 객체의 경험 정보의 분포와 지정 된 도로 후보객체를 나타낸다.
Fig. 4. Road candidates designation (a) Heuristic information map (b) Road candidates
3.2 이행 규칙
배치된 개미는 이행 규칙에 따라 확률적으로 다음 도로 객 체들을 선택해나간다. 번째 반복의 개미는 위치한 객체에서 이웃한 객체들의 페로몬과 경험 정보를 통하여 다음 객체 를 선택한다. 다음 객체를 선택하는 확률은 페로몬과 경험 함 수 (heuristic function)에 대한 식으로 나타낼 수 있으며 경험 함수는 각 객체 서술자의 곱으로 표현된다(Eqs. (4) and (5)).
(a) (b)
∑
∈
N
, ∀ ∈ N
(4)
where
: Pheromone value between object and , N
: Set of all neighbouring objects at object with ant
∙
∙
∙
∙
∙
∙
∙
∙
×
×
×
× (5)
where H : Heavi stepside function, T : Threshold.
3.3 종료기준
본 연구는 두 가지의 종료기준을 가진다. 개미의 도로 객체 탐지 종료기준과 ACO 반복 종료기준이다. 먼저, 개미의 도로 객체 탐지 종료기준은 다음과 같다. (1) 이웃 객체가 모두 방 문한 적 있는 객체일 경우, (2) 이웃 객체가 도로일 확률이 모 두 0일 경우, (3) 방문한 경로가 전 세대 개미의 방문 경로와 일 치할 경우이다. 위의 3가지의 기준 중 한 가지 이상을 만족하 면 탐색이 종료되며 지나온 경로와 역방향 경로를 저장한다.
다음으로, 제안 기법은 각 도로 후보객체에서 최적화된 도로 탐지 결과를 획득하여야 하므로 최적화 반복 종료의 기준이 필요하다 . 이를 설정하기 위해 본 연구에서는 매 반복 배치되 는 개미의 수()를 제안하였다. 의 설정은 개미가 잘못된 탐 지 결과나 초기 탐지 결과에 의존적으로 움직이는 경향을 최 소화할 수 있으며 각 도로 후보객체에서 도로 탐지의 최적화 종료기준을 제공한다. 반복 종료의 기준은 다음과 같다. 같은 세대 마리 개미의 탐색 경로가 모두 일치하며, 이 일치된 탐 색 경로가 이전 세대의 탐지에서 일치된 탐색 경로와 동일한 경우 도로 탐지가 종료된다.
3.4 페로몬 갱신
개미의 도로 객체 탐지가 끝나면 다음 세대 개미들의 이행 규칙에 피드백을 제공하기 위해 페로몬을 갱신한다. 페로몬 갱신은 증발과 강화로 나뉜다. 페로몬의 증발은 페로몬의 무 제한적인 증가를 방지하고 비도로 객체의 페로몬을 감소한다.
번째 세대의 페로몬은 Eq. (8)에 의해 계산되며 페로몬 변화 의 양 는 Eq. (9)와 같이 계산된다.
(8) where : Evaporation rate
∀
∈
E
E (9)
4. 실험 결과 및 분석
4.1 실험 지역
본 연구에서 제안하는 방법의 성능을 검증하기 위하여 실 험에 사용된 영상은 2017년 04월에 획득된 평양시의 Geo- eye-1A 영상으로 Blue, Green, Red와 NIR (Near InfraRed) 밴드를 가지며 다중 분광(multi-spectral) 1.6m, 전정(pan- chromatic) 0.5m의 공간해상도를 제원으로 한다. 실험지역은 1000 x 1000 픽셀로 주차장이나 긴 인도와 같은 유사도로와 도로의 교차로 구간들이 다수 존재하였다. Fig. 5은 실험에 사 용된 고해상도 위성 영상과 육안으로 디지타이징(digitizing) 된 지상 참조자료이다.
Fig. 5. Study area (a) VHR image (b) Ground truth
(a) (b)
4.2 실험 결과
Maboudi et al . (2017)의 실험은 scale=43, shape=0.5, compactness=0.3의 파라미터로 MRS 영상 분할하여 3930개 의 객체를 획득하고 각 객체의 SOLI, spectral heterogeneity, NDVI, NDWI 서술자를 계산하였다. 이후 논문에서 제시된 최적의 파라미터를 사용하여 SOLI에 따른 룰렛 휠 기반 배치 (roulette wheel based breeding)로 반복 당 200개의 객체를 선 정하고 10회 반복하였다.
본 연구에서 제안하는 접근법으로는 scale=45, shape=0.5, compactness=0.7로 MRS 영상 분할하여 3715개의 객체를 획 득하였으며 각 객체의 SOLI, spectral homogeneity, NDVI, NDWI를 획득하고 smoothness와 DCI를 추가로 계산하였다.
ACO의 파라미터로는 증발계수 0.3을 적용하였으며 초기 페 로몬은 1로 설정하였다. 도로 후보객체는 임계치 0.5 이상의 경험 정보 값을 나타내는 객체와 0 이상의 경험 정보 값을 나 타내는 가장자리 객체를 합하여 96개의 객체를 분류하였다.
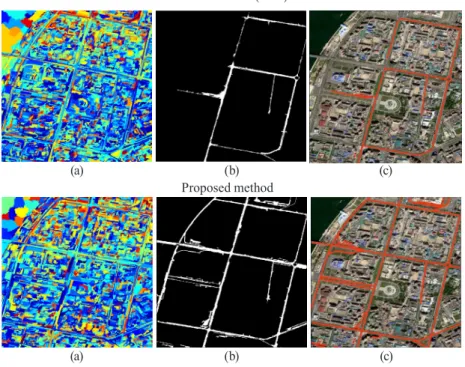
이후 각 도로 후보객체마다 3마리의 개미를 배치하여 개선된 ACO로 최적 도로결과를 획득하였다. 최종 도로 추출결과는 각 도로 후보객체별 도로 추출결과를 선형 결합하여 이진 영 상으로 획득하였다. Figs. 6(a), (b), (c)는 기존의 방법으로 수 행된 결과이며, Figs. 6(d), (e), (f)는 제안된 방법의 결과이다.
(a) (b) (c)
Maboudi et al . (2017)
(a) (b) (c)
Proposed method
Fig. 6. Road extraction results (a),(d) Random color-coded segmentation results (b),(e) ACO road extraction results (c),(f) Final road centerlines superimposed on
the satellite images
4.3 결과 분석 및 정확도 평가
본 연구의 정량적 평가 방법으로는 종래의 많은 도로 추 출 연구에 정확도 평가 방법으로 사용되는 Wiedmann et al . (1998)에 의해 제시된 세 가지 metric에 대하여 평가하였다 (Mayer et al ., 2006; Hu et al ., 2005; Das et al ., 2011; Grote et al ., 2012; Miao et al ., 2014; Cheng et al ., 2017; Maboudi et al ., 2017, 2018). Completeness, correctness, quality를 정의하는 식은 다음과 같다.
≤
≤
×
≤
≤
×
≤
≤
×
(8)
≤
≤
×
≤
≤
×
≤
≤
×
(9)
≤ ≤
≤
×
≤
≤
×
≤
≤
×
≤
≤
×
(10)
Completeness는 참조자료로부터 지정된 범위 안에 추출된 도로의 연장이 포함되는 비율이며 correctness는 추출된 도 로의 지정된 범위 안에 포함되는 참조자료 연장의 비율이다.
Quality는 위의 두 metric의 종합적인 평가 지수이다. Table 3 은 실험 결과의 정량적 평가 결과이다.
실험 결과 본 연구에서 제안한 도로 추출결과는 기존 의 방법보다 52.51%의 completeness, 6.12%의 correctness, 51.53%의 quality 향상을 나타내었다. 기존 알고리즘에서는 탐지하지 못했던 지역적으로 낮은 경험 정보 값을 나타내는 객체를 탐지하는 데 성공했으며 확대된 이웃의 범위에 미치지 못하는 도로 객체 또한 객체 간 서술자를 통하여 효과적으로 도로 네트워크 추출이 수행되었다. Fig. 7에는 본 실험 결과에 서 오 탐지된 지역과 탐지에 실패한 지역을 나타내었다. 도로 와 유사한 형태적 특성을 가지고 있는 건물의 그림자와 인도 등의 객체가 오 탐지되었으며 탐지에 실패한 도로의 경우 건 물 폐색과 도로 위의 차량에 의해 영상 분할 단계에서의 실패 가 주된 원인으로 분석되었다. 이러한 한계를 개선하기 위하 여 보다 다양한 객체 서술자의 반영과 영상 분할 단계에서 최 적의 파라미터 선정에 대한 분석이 필요할 것으로 판단된다.
Table 3. Qualitative assessment of road extraction result
Completeness(%) Correctness(%) Quality(%)
Maboudi et al . (2017) 41.11 88.59 37.44
Proposed 93.62 94.71 88.97
Fig. 7. Road extraction failure area
5. 결 론
본 연구에서는 고해상도 위성영상에서 ACO를 활용한 객
체 기반의 도로 추출을 수행하였다. 객체 기반 분석을 위하
여 먼저 MRS로 영상 분할을 수행한 후 객체 서술자를 계산
하였다. 기존의 객체 서술자가 가지는 한계를 개선하기 위하
여 DCI를 제안하였으며 총 여섯 가지 객체 서술자를 본 연구
에서 제안한 ACO 알고리즘에 적용하여 최종 도로 추출결과
를 획득하였다. 또한, 본 연구에서는 반복 종료기준의 설정을
위하여 개미가 배치되는 시드인 도로 후보객체와 동시에 도로
를 탐색하는 개미의 수를 제안하였다. 제안 방법은 기존의 방
법에서 탐지에 실패하였던 가장자리 혹은 교차로 부분의 도
로 객체 탐지에 성공하였으며 기존 알고리즘 대비 52.51%의
completeness, 6.12%의 correctness, 51.53%의 quality 향상
Fig. 7. Road extraction failure area
5. 결 론
본 연구에서는 고해상도 위성영상에서 ACO를 활용한 객 체 기반의 도로 추출을 수행하였다. 객체 기반 분석을 위하 여 먼저 MRS로 영상 분할을 수행한 후 객체 서술자를 계산 하였다. 기존의 객체 서술자가 가지는 한계를 개선하기 위하 여 DCI를 제안하였으며 총 여섯 가지 객체 서술자를 본 연구 에서 제안한 ACO 알고리즘에 적용하여 최종 도로 추출결과 를 획득하였다. 또한, 본 연구에서는 반복 종료기준의 설정을 위하여 개미가 배치되는 시드인 도로 후보객체와 동시에 도로 를 탐색하는 개미의 수를 제안하였다. 제안 방법은 기존의 방 법에서 탐지에 실패하였던 가장자리 혹은 교차로 부분의 도 로 객체 탐지에 성공하였으며 기존 알고리즘 대비 52.51%의 completeness, 6.12%의 correctness, 51.53%의 quality 향상
을 나타내었다. 하지만 여전히 영상 분할의 품질에 의존적인 결과를 나타내며 도로 후보객체가 영상에 고르게 분포해야 하는 한계점을 가지고 있다.
향후 연구로서는 질감 정보 등을 포함하는 객체 서술자를 활용하여 도로와 인도 및 건물 그림자 등을 구분하는 방법과 다양한 특성을 나타내는 영상 및 영상 분할 방법에 따른 DCI 의 효율 및 객체 서술자별 효용성에 대한 분석이 필요할 것으 로 판단된다.
감사의 글
이 논문은 2018년도 서울대학교 융·복합 연구과제 지원사 업의 지원을 받아 수행된 연구임.
References