디지털 영상과 LIDAR 자료를 이용한 수치지도 갱신
윤부열․홍정수 동아대학교 토목공학부
Updating of Digital Map using Digital Image and LIDAR
Buyeol Yun․Jungsoo Hoog Div. of Civil Eng., Dong-A University
요 약 라이다는 고밀도․높은 정확도로 지상좌표를 빠르게 측량하여 지구표면의 수치표고모델과 수치표면모델를 취득할 수 있는 매핑시스템으로 기존의 항공사진측량과 비교하여 효율적이고, 경제적으로 지상의 DEM을 효과적으로 구축 할 수 있게 되었다. 본 연구에서는 LIDAR와 디지털 카메라를 탑재하여 항공측량을 하고, 수치정사영상을 제작하 였다. 제작된 결과물에 대한 정확도 검증을 위하여 GPS로 측량한 지상 검사점을 기본으로 하여 제작된 수치정사 영상의 위치 정확도를 평가하였다. 수치정사영상은 소수의 기준점을 사용한 경우와 기준점을 사용하지 않은 경우의 두 가지로 제작하였다. LIDAR와 디지털 카메라에 의한 수치정사영상의 제작 작업은 소수의 기준점을 사용하는 경 우에 1:1,000 수치지도를 수정․갱신할 수 있으며, 기준점 없이 제작된 정사영상의 경우에는 축척 1:5,000 수치 지도를 수정․갱신할 수 있을 것으로 판단된다.
주요어 LIDAR, 수치표고모델, 수치정사영상, 수치지도
ABSTRACT LIDAR(Light Detection and Ranging) is a new technology for obtaining DEM(Digital Elevation Model) and DSM(Digital Surface Model) of the earth surface. It is a fast method for sampling the earth surface with high density and high point accuracy. As LIDAR emerged, DEM could be developed in the earth surface more efficiently and more economically, compared to the conventional aerial photogrammetry.
In this study, a digital camera is simultaneously used in combined LIDAR surveying, and acquired digitial image and DEM produce digital orthoimage. In this process, methods of combining sensor and digital orthoimage are examined and estimated. For the comparison of the positioning accuracy digital orthoimage, GCPs determined by GPS surveying are used. Two digital orthoimage are produced; one with a few GCP and the other without them. The produced maps can be used to correct or revised 1:1,000 or 1:5,000 scale maps accordingly.
Key words LIDAR, digital elevation model, digital orthoimage, digital map
1. 서 론
GIS(Geographic Information System)의 자료기반이 되는 기존의 수치지도 생성은 전통적인 항공사진측량에 의해 이루어졌으며 이를 위해서는 입체시를 통한 내부 및 외부표정작업이 선행되어야 한다. 이 중 내부표정은 사전에 실험실에서 사진좌표의 관측만으로 쉽게 해결가 능하나 촬영 당시 사진의 공간위치와 회전방향을 결정
하는 외부표정작업에는 많은 시간과 경비가 소요된다.
1970년대 후반까지는 지상기준점만을 이용하여 결정하 여 왔기 때문에 수많은 지상기준점을 설치하여야 했다.
그러나 소수의 기준점만을 사용할지라도 전체지도제작 비의 30∼40% 정도로 매우 큰 비중을 차지한다. 따라서 촬영 시 여러 가지 보조장치를 이용하여 외부표정요소를 결정하였으나 큰 효과를 보지 못하였다(송연경, 2005).
LIDAR(Light Detection And Ranging)는 외부표정요
Fig. 1 Principle of LIDAR.
소를 직접적으로 결정할 수 있으며 디지털 영상은 필름 영상에 비해 영상 취득의 경비, 속도 및 자료의 관리 등 다양한 측면에서 많은 장점을 지니고 있어 수치지도의 수정과 갱신에 효율적으로 이용될 수 있다(박운용등, 2004).
따라서 본 연구에서는 디지털 영상과 LIDAR를 이용 하여 수치정사영상을 제작하고, 기존의 수치지도에 누 락된 레이어들을 탐지하여 수치지도를 수정․갱신하고 자 하였다.
2. LIDAR와 외부표정요소 결정
2.1 LIDAR
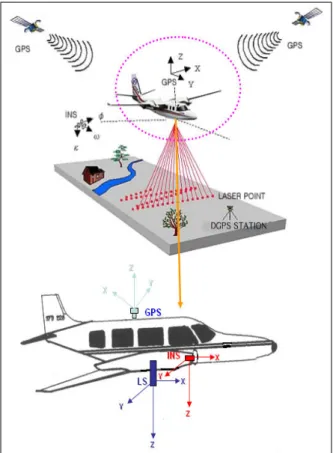
LIDAR는 레이저 스캐너(laser scanner)를 항공기에 장착하여 레이저 펄스를 지표면에 주사하고 반사된 레 이저 펄스의 도달 시간을 관측함으로써 반사 지점의 공 간위치 좌표를 계산해 지표면에 대한 정보를 추출하는 측량기법으로 최근 새로운 지형정보 획득수단으로 부각 되고 있다.
LIDAR는 지상의 표고자료를 취득하는 레이저 스캐너 와 위치결정 및 비행기록 장치인 GPS(Global Positioning System)와 INS(Inertial Navigation System)로 구성되어 있다. GPS는 미리 계획된 비행경로의 유지와 레이저펄 스가 지상으로 발사되는 시점의 레이저 스캐너의 정 확한 3차원 위치를 결정하는 역할을 하며 일반적으로 지상의 기준국과 연계하여 정확도를 향상하는 DGPS (Differential GPS) 방법을 이용한다. 그리고 INS는 비행 중인 항공기의 회전각과 레이저의 발사방향에 대한 정 보를 관측하기 위하여 사용된다. 즉 GPS와 INS는 레이 저 스캐너의 외부표정요소를 결정하는 역할을 한다.
LIDAR에서 자료처리 과정을 통하여 최종 생성되는 산출물로서는 레이저 펄스의 반사 지점들에 대한 다량 의 공간위치(X, Y, Z) 자료와 이로부터 임의로 추출된 공간위치 자료를 이용하여 제작된 격자 자료형식의 DEM(Digital Elevation Model)과 DEM에 수목과 인공 물 등의 지형 피복이 추가된 DSM(Digital Surface Model) 및 지표면 상의 형상(feature)에 대한 정보 등이다.
LIDAR를 이용한 DEM 및 DSM의 제작은 다른 방법에 비해 시간, 비용 및 정확도 면에서 뛰어난 것으로 알려 져 있으며, 이미 외국에서는 연안지역과 산림지역 매핑,
홍수 등의 방재관련 프로그램에서 다양하게 이용하고 있다. Fig. 1에는 LIDAR의 개념도를 나타내었다.
레이저 스캐너는 센서와 지표면까지의 거리 및 방향 을 관측하여 지표면 상의 표고점에 대한 3차원 좌표를 결정한다. 레이저 스캐너는 송신된 레이저 펄스가 지표 면에 도달하여 항공기에 탑재되어 있는 센서로 되돌아 오는 시간을 관측하며, 관측된 시간을 이용하여 지표면 과의 거리를 계산하게 된다(www.opteck.on.ca).
2.2 외부표정요소 결정
3차원 지형정보를 수집․처리하고 가공하는 기법들 이 발달함에 따라 다양한 시스템들이 개발되고 있으며 현재 항공기, 인공위성 및 차량 등을 이용하여 지형정보 를 취득하는 매핑 센서들이 개발되고 있다. 외부표정요 소 직접결정(Direct Georeferencing) 기법은 지형공간정 보를 취득하는 매핑 센서에 대한 여섯 개의 외부표정요 소(Xo, Yo, Zo, ω, φ, κ) 즉, 촬영이나 센싱 당시 탑재된
Fig. 2 Sensor configuration for Direct Georeferencing.
센서의 위치와 회전각을 현지에서 직접 결정하여 모든 영상점들을 지상의 대응점에 매칭시키는 작업을 말한다 (송연경등, 2005).
이러한 외부표정요소 직접결정 기법의 개념에는 실 제적으로 크게 영상의 기하보정 작업과 기하보정된 영 상의 표시를 위한 지도투영면으로의 좌표변환 작업과정 을 거치게 된다. 외부표정요소 직접결정 작업이 완전히 구현되면 기존의 외부표정요소결정 작업에 비해 지상측 량작업과 사진기준점측량 작업이 필요 없으며, 영상자 료로 부터 직접 지상의 위치결정이 가능하고, 타 센서에 의해 수집된 자료와의 연계활용이 편리하다는 장점들이 있다. 또한 수집된 자료의 센서 좌표계와 독립적인 좌표 계로 신속히 표현할 수 있다.
3. 다중센서의 결합
GPS/INS 통합시스템을 이용한 사진기준점 측량의 수행시 초기에는 항공사진측량용 카메라를 이용하였으 나 최근에는 푸쉬브롬(pushbroom)방식의 선형 스캐너 와 SAR (Synthetic Aperture Radar)와 같은 다양한 영상 매핑센서들도 활용하고 있다. 특히, 선형 CCD 디지털 카메라의 경우 푸쉬브롬 방식으로 촬영하며 직접 수치 형태의 자료취득이 가능하므로 실시간 자료처리가 가능 할 뿐 아니라 다중분광영상 취득이 가능하여 각종 주제 도 및 식생 분석이 가능하다. 또한 CCD 디지털 카메라
는 항공기의 비행경로에 연직 방향으로 지형을 스캐닝 함으로서 스트립 입체영상을 얻을 수 있다. CCD 배열 은 보통 3열 방식으로 구성되고, 중심라인은 연직하방 을 촬영하며, 다른 두 라인은 각각 전․후로 기울여 촬 영함으로써 자동으로 스트립 입체영상을 얻을 수 있다.
따라서 GPS/INS 통합시스템을 이용할 경우 각 스캐닝 라인에 대한 시간 정보와 위치 및 회전각 정보가 얻어지 기 때문에 CCD 디지털 영상을 효율적으로 처리할 수 있다. Fig. 2는 외부표정요소의 직접 결정을 위한 GPS, INS와 CCD 디지털 카메라의 배치를 보여준다(Cramer 등, 2004), (Haala 등, 2004).
결합된 외부표정요소의 회전각은 식(1)과 같다.
ωi = ωi+ω0+ω1⋅t φi = φi+φ0+φ1⋅t
κi = κi+κ0+κ1⋅t (1)
여기서, ωi, φi , κi : 보정된 회전각 ωi, φi, κi : 관측된 회전각 ω0, φ0, κ0 : 일정한 이격각 ω1,φ1 ,κ1 : 편류각 오차
영상좌표를 지도좌표의 투영중심 좌표로 나타내는 일반적인 공선조건식은 다음 식 (2)와 같다.
Fig. 3 ALTM 3070.
X map= Xmap0 + mRm app hoto⋅ x p hoto (2)
X map0 =ꀌ ꀘ
︳︳
︳︳ X0
Y0 Z0
ꀍ ꀙ
︳︳
︳︳, X map=ꀌ ꀘ
︳︳
︳ X Y Z
ꀍ ꀙ
︳︳
︳,
Rmapphoto= Rmapphoto( ω, φ, κ), x p hoto=ꀌ ꀘ
︳︳
︳ x' y' - c
ꀍ ꀙ
︳︳
︳ 여기서,
Xmap0 : 지도 좌표의 투영중심좌표
Xmap: 지도좌표의 객체점 좌표
Rma pph oto: 영상에서 지도좌표로의 회전행렬
x ph oto: 영상좌표에서 영상점의 좌표
m : 축척계수
식 (2)를 GPS와 INS 항을 추가하여 카메라와 결합하 여 수정하면 다음 식과 같다.
X map= Xm ap0 +RmapINS⋅[ mRmapphoto⋅ xphoto + △ XINSCam- △ XINSGPS] (3)
X map0 =ꀌ ꀘ
︳︳
︳︳ X0
Y0 Z0
ꀍ ꀙ
︳︳
︳︳, X map=ꀌ ꀘ
︳︳
︳ X Y Z
ꀍ ꀙ
︳︳
︳,
△ XINSCam
ꀌ ꀘ
︳︳
︳︳
△Xcam
△Ycam
△Zcam
ꀍ ꀙ
︳︳
︳︳, △ XINSGPS=ꀌ ꀘ
︳︳
︳︳
△XGPS
△YGPS
△ZGPS
ꀍ ꀙ
︳︳
︳︳,
RmapINS= Rmapphoto( ω, φ, κ),
RI NSp hoto= RIN Sph oto( δω, δφ, δκ), x p hoto=ꀌ ꀘ
︳︳
︳ x' y' - c
ꀍ ꀙ
︳︳
︳
여기서,
Xmap0 : 지도좌표에서 GPS 안테나의 중심좌표
Xmap : 지도좌표에서 객체점의 좌표
△ XINSCam: 카메라와 INS의 이격거리
△ XINSGPS : 카메라와 GPS의 이격거리 RmapINS : 지도좌표에서 INS로의 회전행렬
RIN Sph oto : INS에서 카메라 좌표로의 회전행렬
x ph oto : 영상좌표의 영상점의 좌표
m : 축척계수
또한 부가의 변수로 이용되는 편류 매개변수는 경우 에 따라서 블럭 단위, 스트립 단위 또는 부 스트립 단위 별로 유연하게 도입이 가능하다. 일반적으로 신호차단 이 발생하는 블럭은 불가능하므로 주로 스트립별로 편 류 매개변수를 도입하게 된다. 부가변수의 도입은 때때 로 미지수들 간의 강한 상관관계를 유도하여 결국 정규 방정식을 특이행렬로 이끌어 조정을 어렵게 만들기도 한다. 부가변수의 관측값으로는 GPS 위치 외에도 표고 정보나 기타의 측지 관측값들, 예로서 거리, 방향각 등 을 결합 시 추가의 관측값으로 활용할 수가 있다.
4. 자료 획득과 처리 4.1 실험에 사용된 장비
측량에 사용된 항공기는 CESSNA 208 기종으로 항 공기내에 DEM 획득을 위한 ALTM 3070 스캐너를 장 착한 뒤 운전석 뒤에 항공사진촬영 카메라를 장착하는 자리에 고정판을 만들어 스캐너를 고정하고 컨트롤 컴 퓨터와 CCD 디지털 카메라를 설치하였다. 본 연구에 사 용된 레이저 스캐너 ALTM 3070은 Fig. 3과 같다. 항공기 윗부분에는 구멍을 내어 GPS 안테나를 설치하였다.
GPS 및 INS는 POS/AV 510시스템으로 그 구성은 Fig. 4와 같이 핵심모듈인 LN 200 INS와 인터페이스 장 치 및 비행관리를 위한 컴퓨터 등으로 이루어져 있다.
Applanix의 POS/AV 시스템은 이동하는 항공기나 자동
Fig. 5 CCD camera and data recorder.
Fig. 4 POS/AV 510.
Table 1 Details of CCD image acquisition.
DC 4K 02
Strip number 12 strips(using 3 strips)
Altitude 1400m
Focal Length 55.156mm
Photo Scale 1:25,000
Fig. 6 Used flight map.
Table 2 Details of airborne laser scanning.
ALTM-3070 Laser Header Data
Strip number 12 strips
(using 7 strips)
Altitude 1400m
Point Density 0.5point/㎡
Laser Frequency 70kHz
Users Max Scanner Range 20°
Scanner Counts 65535
차로 지도제작과 정확한 위치정보를 얻기 위하여 개발 되었으며, 이를 위하여 GPS와 관성항법장치를 함께 사 용하고 있다. GPS 수신기와 CCD 카메라는 거의 동시에 작동한다. GPS 수신기가 임의 epoch에서 관측하는 것 은 불가능하다. 따라서 카메라 셔터가 수신기의 출력 신 호에 의해 작동되어야 한다. 기존의 항공 카메라에서는 카메라 셔터를 수동으로 하거나 GPS 관측 epoch에 가 능한 가까이 있는 몇몇 외부장치에 의해 작동되고 셔터 의 중간 개방 시간을 등록한다. 사진측정 항공기의 평균 속도를 고려할 때 시간적인 동기화가 이루어지지 않으 면 몇 m의 오차를 야기할 수 있다(www.applanix.com).
디지털 카메라의 두 가지 중요한 구성요소는 Fig. 5와 같이 카메라 몸체 자체인 CCD 카메라와 하드디스크 인 비행자료 기록기이다. 기하학적 변환이 복잡하므로 GPS/INS를 이용한 외부표정요소 직접결정을 적용하면 보다 나은 정확도를 얻을 수 있다. 디지털 영상의 정확 도는 재래식 항공사진측량과 같이 지상기준점에만 의존 하지는 않는다. 하지만 지상기준점을 이용하면 표정과 검정의 정확도를 훨씬 향상시킬 수 있다.
4.2 CCD 영상취득
실험대상 지역 선정 시에 산악지, 도심지, 항구 등이 모두 포함되도록 계획하였다. 촬영대상면적은 약 20㎢
으로 Fig. 6에 연구 대상 지역에서의 비행 궤적을 나타내 었으며, Table 1에 CCD 카메라 측량의 상세내용을 수록 하였다. LIDAR 측량 상세내용은 Table 2에 수록하였다.
4.3 LIDAR를 이용한 DEM 생성
비행을 통해 얻어진 자료들은 두 가지 소프트웨어를
Fig. 7 Generation of DSM.
Fig. 9 Distribution of control point.
13
6
18 4
3 1 2
11
5
1 88000 1 88500 1 89000 1 89500 1 90000 1 90500 1 91000 1 91500 1 92000
15900 0 160000 161000 162000 163000
Fig. 8 Generation of DEM.
이용하여 처리하였다. INS 자료와 GPS 자료는 REALM 모듈인 POSProc로 처리한 후 REALM ASCII 처리모듈 을 이용하여 ALTM 레이저 자료와 통합한 후 3차원 위 치 좌표값들을 계산하여 ASCII 파일을 생성하였다.생 성된 원시자료는 오차점을 소거하고 건물영역과 지형영 역으로 분류한 후, 좌표변환 하였다. 자료가 공백지역 없이 생성되었는지 확인하고 노이즈에 의한 오차점을 제거한다. 그리고 좌표변환의 과정을 거치고 보간에 의 해 자료를 생성되게 하였다.
LIDAR로 얻어진 ASCII 자료는 측량 경로별로 분리 되어 있으므로 이를 영역(sector)별로 분리하였다. 인접 부분에서 문제가 발생하지 않도록 버퍼링(buffering)을 수행하였다. 획득된 자료는 간격이 불규칙한 점자료이 기 때문에 실제 지형의 고도값이 잘 반영될 수 있는 DEM을 생성하기 위해서는 자료를 분류하여 보정하고, 건물 등 인공구조물들이 제거된 부분에 대한 지형을 처 리하는 보간이 이루어져야 한다.
식생과 건물이 제거된 지형의 반영을 위해서는 일반 적으로 TIN 보간을 주로 사용하게 된다. TIN 보간은 점 간의 라인을 형성하여 완만한 지형을 이루게 되는 최적 의 보간법이라 할 수 있으며, 여기에 제방 및 도심의 도 로를 잘 반영할 수 있도록 추출한 불연속선을 삽입하였 다. Fig. 7과 Fig. 8은 LIDAR의 개별 결과들을 통합하 여 DSM과 DEM을 생성한 모습이다.
4.4 정사영상 생성
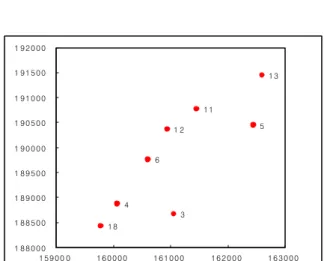
외부표정요소 직접결정 기법에 의해 정사영상을 자 동으로 생성하기 위해서는 카메라의 외부표정요소를 직 접 입력(key-in)한 후, 레이저시스템으로 획득한 DEM 를 이용하여 영상정합 기법으로 두 장의 사진에서 공액 점을 추출하여 3차원 좌표를 생성하는 공정으로 수행하 였다. 향후 다중센서 결합을 통한 수치정사영상생성이 실무에 보편적으로 활용될 경우에 기존의 재래식 방법 에 비해 절대적으로 소수의 기준점만이 필요할 것으로 예상되므로, 이러한 경우에 대비하여 소수의 기준점인 8개 기준점을 사용한 경우와 기준점을 사용하지 않은 경우의 수치정사영상을 생성하였다. Fig. 9에는 사용된 8개의 기준점의 배치를 나타내었다.
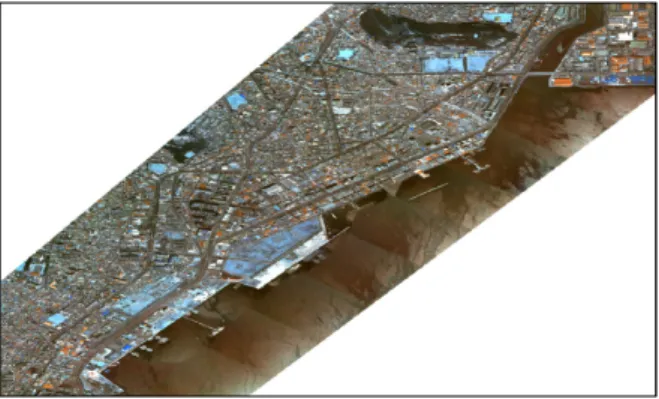
최종적으로 정사영상 제작지역 전체의 사진에 대하
여 모자이킹 작업을 계속 수행하게 되면 완전한 정사영 상이 생성된다. Fig. 10과 Fig. 11에는 상기의 과정을 통 하여 생성된 연구대상 지역에 해당하는 정사영상을 보 여주고 있다. Fig. 10은 8개의 기준점을 사용하여 생성 한 정사영상이며, Fig. 11은 기준점 없이 외부표정요소 만으로 생성한 정사영상이다. 생성된 최종 정사영상은 그림에서 보는 바와 같이 축척이 균일하고 대상지역내 의 모든 지형․지물에 대한 편위가 수정된 지도와 동일 한 기하하적 상관성을 가지고 있음을 알 수 있다.
Fig. 11 Orthoimage(no control point).
Fig. 10 Orthoimage(8 control points).
Fig. 13 Accuracy of DEM.
Li DAR DEM Accuracy
-0.600 -0.400 -0.200 0.000 0.200 0.400 0.600
1 2 7 9 10 11 13 15 16 17 18 19
Check point No.
Error(m)
DZ
Fig. 12 Distribution of checkpoint.
1
14 7
8 13
1110 195
2 9 12
6 15
4 3 18 16
17 187000 187500 188000 188500 189000 189500 190000 190500 191000 191500 192000
159000 160000 161000 162000 163000 164000 165000
`
◆ Used
■ Removed
● Outside
5. 정확도 평가 5.1 DEM 정확도 평가
오차분석은 LIDAR에 의해서 제작된 DEM과 실제 대상지역에서 측량 결과 얻어진 표고값을 비교하는 방 법으로 실시하였다. 이 때, 동일한 지점의 값들을 비교 하였으며, 표준편차를 계산함으로써 정확도를 평가하였 다. 수직위치 정확도를 검증하기 위한 검사점은 대상지 역 내에서 비교적 편평한 지형을 가지고 있는 일정 크기 이상의 지점, 즉 운동장이나 도로, 주차장과 같은 곳을 대상으로 하였으며, 주변에 고층건물 등 GPS 수신을 방 해하는 요인이 없는 곳으로 선점하였다. 검사점의 분포 는 Fig. 12와 같다. 지상 검사점의 측량은 CCD 영상을 기준으로 19점 측량하였으며, 실험지역을 벗어난 검사 점이 3점, DEM을 생성하는 과정에서 제거된 4점을 제 외한 12점에 대하여 평가하였다.
연구대상지역의 수직 정확도 검증 결과를 Fig. 13에 도시하였다. 검사점 측량 결과와 DEM의 동일한 지점에 대한 표고를 비교한 결과, 표준 편차는 0.324m로 나타 났다. 비행고도 1400m, 0.5 point/㎡로 LIDAR 측량했을 경우 제작된 DEM 수직위치 정확도가 ± 0.324m 로서, 이는 축척 1:1,000 지도의 정확도 기준을 만족시키는 것 을 알 수 있었다.
5.2 정사영상 정확도 평가
제작된 정사영상에 대한 정확도의 가장 객관적이고 정량적인 검증을 위하여 총 19점의 지상기준점 중에서 영상에서 확인이 힘든 삼각점 2점과 수준점 1점을 제외 한 16점의 검사점을 선정하여, 정사영상 상에서 이 검사 점에 대응하는 점을 추출하여 그 좌표를 관측하고 두 좌 표값의 편차를 계산하였다. 정확도는 공공측량작업규정 의 세부기준에 제시된 지도의 정확도를 사용하였으며
Fig. 14 Horizontal accuracy of orthoimage(8 control points).
Orthoimage - 8 GCP Accuracy
-3 -2 -1 0 1 2 3 4
1 2 3 4 5 6 7 8 11 12 13 15 16 17 18 19
Check point No.
Error(m)
DX DY
Fig. 15 Horizontal accuracy of orthoimage(no control point).
Orthoimage - 0 GCP Accuracy
-4 -3 -2 -1 0 1 2 3 4 5
1 2 3 4 5 6 7 8 11 12 13 15 16 17 18 19
Check point No.
Error(m)
DX DY
Table 3 Accuracy of map.
Item Scale
Remark
1/500 1/1000
STDEV
horizontal within 0.5mm within 0.7mm distance of map vertical
vertical
point within△h/4 within △h/3 △h: interval of inter- mediate contour line contour line within △h/2
(대한측량협회, 2002; 국토지리정보원, 2002) 그 기준은 Table 3과 같다. 축척 1:1,000 의 경우, 허용정확도는 0.7m (0.7mm×1000)이며, 축척 1:5,000의 경우, 허용정 확도는 3.50m (0.7mm×5000)가 된다.
8개의 기준점을 사용한 경우, Fig. 14에서 보는 바와 같이 정사영상의 평면 정확도는 표준편차가 약 0.36m 이다. 그리고 X축의 표준편차는 0.23m, Y축의 표준편 차는 0.28m 정도이다. 각 검사점에서의 편차의 크기는 검사점 17번의 Y축에 대한 오차가 -0.52m 정도로 가장 큰 경우를 제외하면, 대부분 0.10 ∼ 0.30m 범위 내에 존 재하여 오차의 크기는 매우 균질하며 결과의 정확도는 우수함을 알 수 있다. 8개의 기준점을 사용하는 경우, 수 평위치 정확도가 ± 0.36m 로서, 이는 축척 1:1,000 지도 의 정확도 기준을 만족시키는 것을 알 수 있다.
Fig. 15에서 알 수 있는 바와 같이 기준점을 사용하지 않은 정사영상에 대한 평면오차는 표준편차가 약 2.51m 이다. 그리고 X방향으로는 1.61m, Y방향으로 1.93m의 표준편차 값을 갖는다. 또한 비교적 큰 크기의 오차가 검사점 12와 17번에서 발생하고 있으며 기타 검사점에 대하여는 표준편차 범위 내에서 균질한 크기를 보이고
있으며, 최대오차는 검사점 17에서 약 3.69m 정도이다.
기준점을 사용하지 않고 제작된 정사영상의 경우에는 수평위치 정확도가 ± 2.51m 로서, 이는 축척 1:5,000 지 도의 정확도 기준을 만족함을 알 수 있었다.
외부표정요소 직접결정 기법에 의한 정사영상의 제 작방법은 효율적으로 수치지도를 수정․갱신 할 수 있 을 것으로 판단된다. 검사점을 기준으로 위치정확도를 평가한 결과 그 활용성이 큰 것을 입증하고 있다.
6. 수치지도 레이어의 수정과 3차원 모델 생성 6.1 수치지도 레이어 수정 및 갱신
생성된 정사영상은 최근의 지표면 자료가 반영되어 있기 때문에 이들 자료를 이용하여 연구대상 지역에 대 한 수치지도를 갱신하였다. 수정된 레이어는 건물, 도로 등이며, 갱신된 레이어는 항만에 새로이 매립된 지역이 다. Fig. 16∼17은 새로 매립된 지역을 8개 기준점을 사 용하여 생성한 정사영상과 기준점을 사용하지 않고 생 성된 정사영상을 기존의 수치지도와 중첩하여 나타내었
Fig. 16 1:5,000 digital map overlay (8 control points).
Fig. 17 1:5,000 digital map overlay (no control point).
Fig. 18 1:5,000 digital map correction (8 control points).
Fig. 19 1:5,000 digital map correction (no control point).
으며, Fig. 18∼19는 각각의 정사영상에서 벡터라이징 을 통해 수치지도를 수정 및 갱신한 모습을 나타내었다.
6.2 렌더링을 통한 3D 모델 생성
재래식 방법에 의한 기존의 수치지도는 2차원 평면도 의 제작을 목적으로 하고 있기 때문에 현저한 지형․지 물인 가옥이나 빌딩, 시설물 등의 도화 시에 주로 대상 물의 외곽 경계부분을 따라 도화가 이루어지고 있다.
즉, 시설물의 높이에 따른 기복에 의한 변위량은 거의 고려하지 않고 있는 실정이다. 따라서 높이 값의 차이가 나는 시설물이나 건물의 경우라 해도 구조화 편집 과정 을 거치면서 대상 도화 시설물의 높이 값을 모두 “0”으 로 처리하는 경우가 대부분이다. 이와 같은 작업방법으 로 완성된 수치지도의 구조물 레이어에 의해서는 3차원 자료의 생성이 전혀 불가능하거나 생성한다 하더라도
이의 정확도는 현저히 떨어진다.
따라서 기존의 2차원 자료를 제작하는 도화방법에서 탈피하여 CCD 디지털 영상과 렌더링을 이용하여 직접 3차원 정보를 생산할 수 있는 새로운 입체시 도화방법 이 필수적이다. 이러한 개념에 의한 입체시 도화의 결과 물은 3차원 시각화에 곧 바로 활용할 수 있다. 렌더링 (rendering)은 재료를 지정하고 빛을 준 상태에서 3차원 모델의 컴퓨터 영상을 계산하는 과정이다. 따라서 이 기술은 현재 GIS 분야에서 매우 중요한 개발 대상 기술 중의 하나이다. 기존의 2차원 도화 방식에서 3차원 입체 도화 방식의 변환에 따른 작업공정은 기존의 공정과 비 교하여 크게 달라지지는 않는다. 다만, 작업 방식 자체 가 기존의 방식과 전혀 다른 방식으로 이루어지며, 동일 한 작업 대상지역에 대하여 작업시간이 상대적으로 많 이 소요 될 뿐이다.
Fig. 20은 표고 결정 및 DSM 제작이 끝난 후 대상물
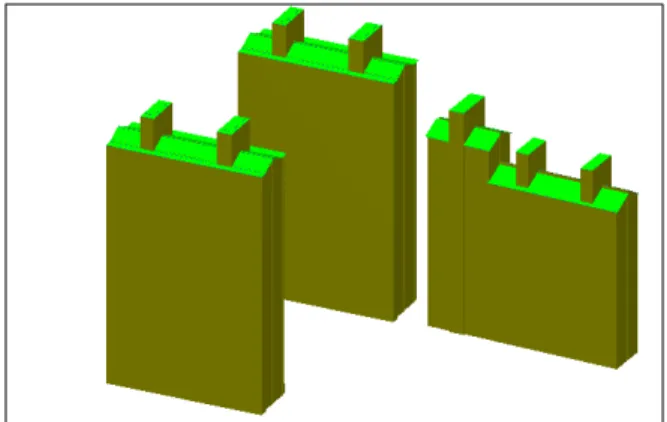
Fig. 20 Render of building. Fig. 22 Building vector overlay.
Fig. 21 Render of building vector.
의 각종 속성 및 질감을 정의하여 최종적인 출력 영상을 얻는 과정을 보여주고 있다. 렌더링 시 고려해야할 요소 들은 조명의 조정, 카메라의 조정, 모델의 표면 질감 및 컬러선정 등이다. 일반적으로 렌더링 과정은 3차원 그 래픽의 성능을 결정하는 중요한 요소이다.
3차원 도화작업 시, 모든 구조물에 대하여 라인과 라 인스트링 형태로 자료를 생성하였고, 도화의 형태 분류 로는 크게 박스형 건물, 피라미드형 건물, 돔형 건물, 원 통형 건물, 콘 형 건물, 기타 건물로 나누어 작업하고 각 각 별도의 레이어로 분리하여 생성하였다. Fig. 21에서 렌더링 자료를 3차원으로 시각화하였다. 기존의 도화자 료와는 다르게 건물의 옥상에 존재하는 돔이나 다른 여 러 가지 구조물에 대해서 도화가 이루어져 있음을 볼 수 가 있다. Fig. 22에서는 CCD 카메라를 이용하여 제작된 정사영상과 렌더링 된 구조물을 중첩시켜 나타내었다.
7. 결 론
본 연구에서는 LiDAR 측량을 이용하여 DEM 및 DSM 을 제작하고, LiDAR 측량과 동시에 디지털 영상을 획 득하여 LiDAR DEM 자료와 수치영상을 융합하여 수치 정사영상을 제작하고, 이의 적용 가능성을 평가하였다.
수치정사영상 제작에 필요한 기존의 DEM 제작이 수 작업에 의한 수정이나 수치지도 등의 변환에 의한 간접 방법에 비해, 본 연구는 LiDAR 측량 시 동시에 획득한 수치 영상을 외부표정요소 직접결정에 의한 자동처리만
을 이용하여 제작함으로써 정사영상 제작의 활용성을 높이고자 하였다. LiDAR 측량과 디지털 카메라 측량을 수행하여 분석한 결과, 다음과 같은 결론을 얻었다.
1. 본 실험의 LiDAR DEM의 수직 위치정확도는 축척 1:1,000 지도의 정확도 기준을 만족시키는 것으로 수 m의 오차가 나는 기존의 DEM 제작 방법보다 우수 함을 입증하였다.
2. 제작된 정사영상의 정확도는 소수의 기준점을 사용 한 경우, 축척 1:1,000 지도의 정확도 기준을 만족시켰 다. 기준점이 없이 제작된 정사영상의 정확도는 축척 1:5,000 지도의 정확도 기준을 만족함을 알 수 있었다.
3. LiDAR DEM과 디지털 영상에 의한 정사영상의 제작 작업은 소수의 기준점을 사용하는 경우에 1:1,000 수
치지도를 수정 갱신할 수 있으며, 기준점 없이 제작 된 정사영상의 경우에는 축척 1:5,000 수치지도를 수 정․갱신할 수 있을 것으로 판단되었다.
4. LiDAR 원 자료로부터 식생과 건물을 분류하고, TIN 알고리즘의 적용을 통하여 DEM 및 DSM을 제작하 여 CCD 영상과의 융합으로 건물을 렌더링 하는 방 법을 제시하였다.
본 연구의 결과는 향후 다중센서와 디지털 카메라 영 상을 이용한 3차원 모델링에 유효하게 적용될 것으로 기대되며 효율적으로 수치지도를 수정 및 갱신 할 수 있 을 것으로 판단된다.
참고문헌
국토지리정보원, 2002. 수치표고모델 시범 연구사업, pp.147-149 대한측량협회, 2002, 공공측량작업규정, pp.57-58.
박운용, 박홍기, 위광재, 송연경. 2004, 외부표정요소 직접결정에 의한 수치정사영상 생성, 한국측량학회 추계학술발표회 논문 집:245-251.
송연경, 2005, Direct Georeferencing에 의한 LiDAR 자료와 CCD 영상의 융합과 적용기법, 동아대학교 박사학위논문, pp.8.
송연경, 이재원, 위광재, 박운용, 2005, LiDAR 자료와 CCD 영상 을 이용한 3D 렌더링, 대한토목학회 학술발표대회 논문집.
Cramer, M., Stallmann, D., Haala, N. 2004. Sensor Integration and Calibration of Digital Airborne Three-line Camera System. Institute for photogrammetry. Commission Ⅱ, Working Group 1. www.ifp.uni-stuttgart.de
Haala, N., Stallmann, D., Cramer, M. 2004. Calibration of Directly Measured Position and Attitude by Aerotriangulation of Three-line Airborne Imagery. Institute for photogrammetry.
Commission Ⅲ. Working Group 1. www.ifp.uni-stuttgart.de www.applanix.com
www.opteck.on.ca