Vol.11, No.5, pp.36-41 (2017) https://doi.org/10.20910/JASE.2017.11.5.36
Kevlar wire를 이용한 링크 구동형 우주잔해 포획장치
정진원1· 황보현1· 김희경1· 이건희1· 서민석1· 이동윤1·김병규1,2,†
1한국항공대학교 항공우주 및 기계공학부
2한국항공대학교 KAU 로봇연구센터
A Linkage Based Space Debris Capture Device Utilizing Kevlar Wires
Jinwon Jung1, Bohyun Hwang1, Heekyung Kim1, Gunhee Lee1, Minseok Seo1, Dongyun Lee1 and Byungkyu Kim1,2,†
1School of Aerospace and Mechanical Engineering, Korea Aerospace University
2KAU Robot Research Center, Korea Aerospace University Abstract
As the space debris in the satellite orbit increases, the risk of collision between the currently operating satellites and the space debris is continuously increasing. Therefore, in this study, we designed one-degree-of-freedom capture device using simple deployment mechanism. The capture device consists of four link groups connected with net. To increase the reliability, each link group is connected to one driving part so that the total degree of freedom is 1. In addition, the links were stowed on each side of the satellites so that they would not affect the janitor satellite mission. Finally, to confirm the possibility of deployment in the space environment, we carried out deployment experiments in water similar to the microgravity environment, and confirmed the deployment of capture device and the possibility of capturing target satellite.
초 록
위성 궤도 내 우주 잔해가 늘어남에 따라 현재 운용 중인 위성들과 폐위성과의 충돌 위험이 지속적 으로 증가하는 추세이다. 위 문제를 해결하기 위해 본 연구에서는 1 자유도의 간단한 메커니즘을 사용 한 포획장치를 설계하였다. 포획장치는 net가 연결된 4개의 링크군으로 구성되었다. 또한 신뢰도를 높이 기 위해 4개의 링크군을 하나의 구동부에 연결하여 자유도가 1이 되도록 설계하였다. 포획장치가 청소 위성(janitor위성)의 임무수행에 영향을 끼치지 않도록 위성의 옆면에 수납하였다. 최종적으로 우주 환경 에서의 전개 가능성을 파악하기 위해 미세중력 환경을 모사한 수중환경에서 포획장치 전개 실험을 수 행하였다. 포획장치 전개실험 중 janitor위성과의 간섭 없이 전개완료 됨을 확인함으로써 대상 위성 포획 에 대한 가능성을 검증하였다.
Key Words : Space Debris(우주 잔해), Capture Device(포획장치), One Degree of Freedom Mechanism(1 자 유도 메커니즘), Kevlar Wire(케블러 와이어), Linkage(링크 장치)
Received: Sep. 11, 2017 Revised: Sep. 29, 2017 Accepted: Oct. 25, 2017
† Corresponding Author
Tel: +82-2-300-0101, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
1. 서 론
최근 활발한 우주 개발과 위성 발사에 의해 임무 수 명이 종료된 폐위성과 임무 수행중인 위성간의 충돌 위험성이 증가하고 있다[1,2].따라서, 2007년 UN 외
기권 평화적 이용 위원회(COPUOS)의 승인 아래 우주 잔해 완화를 위한 지침을 발표 하였다[3]. 또한, 우주 잔해 및 폐위성과의 충돌 위험성을 방지하고자 다양한 방안을 제시하였다[4-7]. 우주 잔해 제거 방식에는 가 항력 돛을 이용하여 저궤도에서 이탈하는 방식인 완화 방식(Mitigation method)[4,5], 지상에서 레이저포를 발사하여 제거하는 지상 제어 방식(Ground control method)[6]과 궤도상에서 직접 잔해를 수거하는 방식 인 포획 방식(Capture method)이 있다[5,7]. 실제로
세계 각국에서는 이런 다양한 방식을 기반으로 한 능 동적인 우주잔해 제거장치의 연구 및 개발을 진행하고 있다[8].
본 논문에서는 포획 방식에 사용되는 포획 장치를 제시하였다. 본 논문에서 제안하는 장치는 포획장치를 탑재한 janitor 위성이 자신과 같거나 작은 크기의 폐 위성을 포획할 수 있도록 설계 되었으며, 위성이 임무 를 수행 중일 때는 임무 수행에 방해가 되지 않도록 위성의 옆면에 수납하였다. 구동부는 하나의 동력원으 로 전개 및 포획이 가능하도록 설계하여 안정성을 높 였다. 또한, 미세중력 환경을 모사하기 위하여 수중에 서 전개 실험을 수행하였다[9].
2. 목표 우주 잔해
2.1 목표 우주 잔해 선정
본 연구에서는 저궤도 상의 우주 잔해 중 2번의 충 돌 위험이 있었던 과학기술위성 3호를 포획대상으로 선정하였다. 대상 위성은 궤도 내에서 일정한 속도로 비행하고 있으며 자세를 제어할 수 없다고 가정하였 다. 따라서 janitor 위성은 대상 위성과 비슷한 속도로 궤도를 돌며 접근하여 대상 위성의 자세와 관계없이 포획할 수 있어야 하며, 포획 시 janitor 위성에 손상 이 없어야한다.
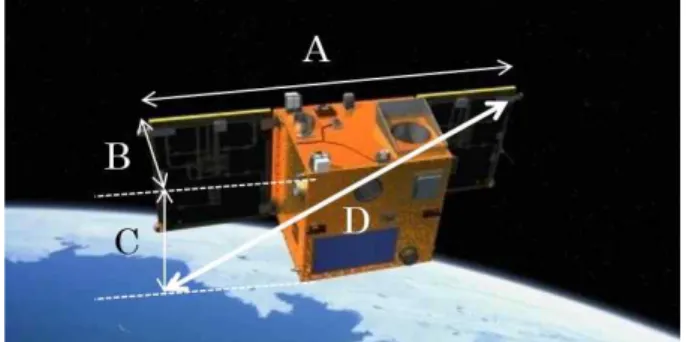
Fig. 1 Science And Technology Satellite-3
Figure 1에서 표현된 Science And Technology Satellite-3의 크기는 가로길이 A는 2535.5 mm, 세로 길이 B는 865.6 mm, 높이 C는 1030.5 mm, 최대길 이인 대각선길이 D는 2869.7 mm 이다. 위성의 자세 와 관계없이 포획하기 위하여 대상 위성의 가장 긴 변
의 구체를 포획할 수 있는 크기의 포획장치를 설계하 였다.
3. 포획장치 설계
3.1 포획장치 구성
Fig. 2 Device configuration a) stored linkage b) deployed linkage c) linkage connection with satellite body d) total stored capture device configuration
본 연구에서는 대상 물체의 가장 긴 변을 지름으로 하는 구체를 포획 및 구속할 수 있도록 포획장치를 설 계하였다. 또한 위성 발사 시 부피가 제한됨을 고려하 여 수납효율 향상을 도모하였다. 포획장치는 4개의 링 크군을 갖도록 구성하고, 각 링크군의 전개 시 링크간 맞닿는 단면각도에 의해 대상물체를 충분히 구속 할 수 있는 공간을 형성하도록 하였다(Fig. 2 a)). 각 링 크의 연결부에는 힌지를 달아 이웃하는 링크들이 힌지 의 고정 축을 중심으로 회전하도록 하였으며, 전개 완 료시 각 링크의 면이 맞닿도록 하였다(Fig. 2 b)). 각 링크에 kevlar wire를 통과시켜 7 개의 링크가 1 개 의 링크군이 되도록 연결하여 reel에 고정하였다(Fig.
2 c)). 포획장치 전개 시 모터가 reel을 회전시켜 각 링크에 연결된 kevlar wire를 감아 4 방향의 링크를 동시에 전개시킨다. 전개 후 대상 우주 잔해가 포획장 치 밖으로 빠져나가지 못하도록 각 팔 사이를 kevlar wire로 연결하여 그물을 형성하였다. 수납 시에는 포 획장치가 janitor위성의 옆면에 장착되어 위성의 임무 수행 시 영향을 미치지 않도록 설계하였다(Fig. 2 d)).
3.2 포획장치 제원
본 연구에서는 제작 및 실험의 용이성을 위하여 실 제모델의 1/6 축소모델을 제작하였다. 축소모델의 포 획 가능 대상 크기는 지름 478 mm의 구체이며, 최소 폭 144.27 mm이다. 목표 대상을 어떠한 자세에서도 포획할 수 있으며, 대상이 포획장치를 빠져나가지 않 도록 설계하였다. 축소모델의 형상은 Fig. 3 과 같다.
Figure 3 a)에 표현된 θ1~θ6 의 크기는 각각 157°, 165°, 165°, 170°, 140° , 130° 이다. Fig. 3 b)에서 표현된 포획장치 입구 부분의 마주보는 링크사이의 거 리 L1은 89 mm이며 대상 물체의 최소 변인 144.27 mm보다 작은 크기로 대상 물체가 빠져나가지 못하도 록 한다. 또한 링크의 끝부분과 janitor위성 사이의 거 리 L2는 585 mm, 마주보는 링크 사이 최대길이 L3는 613 mm이며, 대상 물체의 가장 긴 변을 지름으로 하 는 구체로 가정했을 때 구체의 지름을 초과하는 크기 로 포획 공간을 형성한다. 각 링크의 길이는 125 mm 로 동일하다.
Fig. 3 Scale downed model a) front view b) isometric view
3.3 포획장치 구동부 및 메커니즘
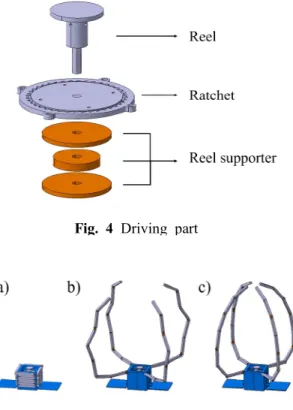
제안된 포획장치의 구동부는 Fig. 4 와 같이 reel, ratchet, reel supporter로 구성되어있다. Rachet과 satellite body는 4 지점에서 볼트 체결을 하여 고정 하였으며, reel이 위성에 고정되어 회전할 수 있도록 supporter를 추가하였다. 구동부는 모터를 이용하여 회전하도록 하였다.
포획장치는 전개 메커니즘과 포획 메커니즘이 하나 의 동력에 의하여 동시에 작동된다. Reel이 회전하여
링크들을 연결하고 있는 kevlar wire를 당기면 위성의 4 방향 모서리에 수납되어 있던 링크들이 위성의 중심 으로부터 반경 방향으로 전개된다. 완전히 전개된 형 상은 Fig. 5 c) 와 같으며, 완전히 전개된 후에는 ratchet을 이용하여 reel이 반대 방향으로 회전하지 못하고, 전개된 링크가 전개형상을 유지하도록 하였다.
본 논문에서 제시한 포획장치는 1/6 모델로 제작 되 었으나 구동부의 경우 구동부를 구성하는 장치들의 메 커니즘을 구현하기 위해 모델 크기를 축소하지 않았 다. 따라서 실제 위성에 적용 시 구동부가 상대적으로 작은 크기가 되며, 위성의 내부에 위치하여 janitor 위 성 운용에 필요한 센서 등의 장치에 영향을 미치지 않 도록 하였다.
Fig. 4 Driving part
Fig. 5 Deployment process a) stored b) deploying c) deployed
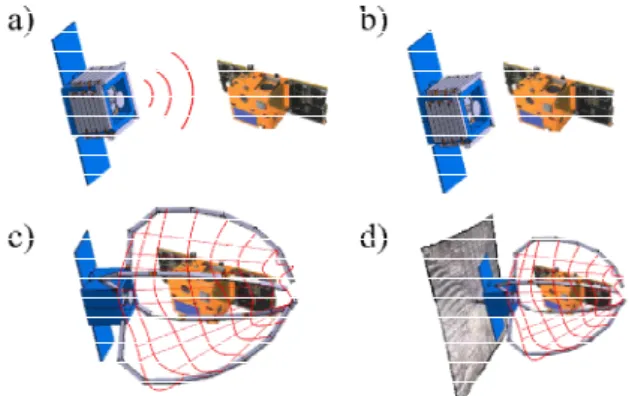
4. 포획 시나리오
- STEP a) : 목표 저궤도에 있는 목표 대상에 접근.
- STEP b) : 목표 대상과 적절한 거리를 유지한 뒤 링크를 구속하고 있는 장치를 해제하고 모터를 구동.
- STEP c) : Reel 회전에 의해 링크가 길이 방향으로
전개된 후 목표 대상이 포획장치를 빠져나가지 못하도 록 구속.
- STEP d) : Rachet에 의해 전개가 완료된 링크가 고정되어 전개 후 형상을 유지하며, 가항력 돛을 전개 시켜 목표 대상과 함께 대기권으로 진입하여 소멸.
Fig. 6 Capture scenario a) approach to target satellite b) keeping nearby distance capture device and target satellite c) capture process d) deploying drag sail
5. 이론적 계산
5.1 미세중력 모사를 위한 수중전개실험
미세중력 상태를 모사하기 위해 수중에서 실험을 수 행 하였다. 물의 온도는 상온(20°C)으로 가정하였다.
각 링크들은 3D프린터(GIANTBOT G5P)를 이용해 제 작하였으며, 밀도 1.26 g/cm3의 PLA(Polylactic acid) 를 재료로 사용하였다. 링크의 내부는 22%만을 재료 로 채워 제작하도록 설정하였으며, 링크의 벽면 두께 는 2.0~2.8 mm로 하였다. 결과적으로 각 링크의 무게 는 30.56 gf이다. 또한 각 링크가 상온의 물속에서 받 는 부력은 28.07 gf 이다. 결국 각 링크는 중력방향으 로 약 2.49 gf의 중력을 받게 되며, 이는 수중에서 링 크가 받는 중력의 약 8.15%이다.
5.2 전개를 위한 reel 회전수
위성과 연결된 첫 번째 링크를 제외한 나머지 각각 의 링크가 전개되기 위해 필요한 wire의 변위 dr2~dr7
을 구하는 식은 링크형상에 의해 다음과 같다.
· sin
⋯
이때 Ɵ는 링크 끝 면의 기울어진 각도, r은 경첩 힌 지의 반지름, d는 링크 두께이다. 위성과 연결된 첫 번 째 링크가 전개되기 위해 필요한 wire의 변위 dr1을 구하는 식은 다음과 같다.
sin
· sin
요구되는 길이의 wire를 당기기 위한 reel의 회전수 는 다음과 같다.
이때
은 와이어 변위 dr1~dr7의 합이며, R은
reel의 반지름이다. 위 식을 이용하여 계산한 결과 reel을 약 2.04바퀴 회전시켰을 때 링크를 완전히 전 개 시킬 수 있다.
5.3 전개를 위한 토크
미세중력 환경을 모사한 수중전개실험에서 링크에 가해지는 지배적인 힘은 유체의 항력으로 가정하였다.
링크가 회전운동을 하므로 링크의 전개 속도는 링크중 심점의 회전에 의한 선속도로 가정하였다. 수조 내에 서 실험 하였으므로, 유체 속도는 링크의 속도로 가정 하였다. 전개 실험에서 모터의 회전속도는 15 RPM으 로 하였다. 전개 시 링크에 작용하는 유체의 항력Fd
는 다음과 같다[10].
이때 ρ는 유체 밀도, v는 링크 속도, CD는 항력계수, A는 링크의 회전방향 면적이다. 항력계수를 구하기 위 해 레이놀즈수를 구하는 식은 다음과 같다[10].
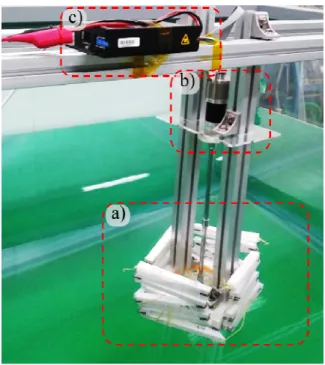
Fig. 7 Experimental setup a) capture device b) motor c) motor controller
Fig. 8 Experiment process a) stowed b) deploying 1 c) deploying 2 d) deployed
이때 L은 링크의 길이, μ는 유체의 점성계수이다.
위 식을 통해 계산한 수조 내 유체의 레이놀즈수는 약 2207이며 이에 따른 유체의 항력계수는 약 1이다.
링크의 전개 속도를 링크의 중심점으로 가정하였으 므로, 항력에 의한 힘은 링크의 중심에 가해진다. 경첩 의 힌지 부분을 기준으로 항력에 의해 링크에 발생하 는 모멘트는 wire에 의해 링크에 작용하는 모멘트와 같아야 한다.
· ·
이때 r1은 링크의 절반길이, f는 wire에 의해 링크에 가해지는 힘, r2는 링크 두께의 절반 길이 이다.
위 식을 통해 계산한 결과 f는 약 238.4 N이다.
·
결과적으로 reel을 회전시키기 위한 모터의 토크T는 위 식에 의해 약 2.4 Nm로 나타나 이를 만족하는 ㈜ 맥슨모터코리아의 EC motor EC-i40 BLD 50W KL 2WE A 모터를 사용하여 전개실험을 수행하였다.
6. 미세중력 환경 모사 수중전개실험 및 결과
제안된 포획장치의 실제 활용 가능성을 확인하기 위 하여 미세중력 환경을 모사한 수중전개실험을 수행하 였다(Fig. 6). 실험 시 모터를 제어하여 reel이 15 rpm으로 2.04바퀴 회전하도록 설정하였다.
위 식에 의해 링크가 완전히 전개되는데 걸리는 시 간은 약 8.17초이다. 실험 결과 약 8.2초로 측정 되었 다. 전개 후 ratchet에 의해 형상이 유지되어 대상 물 체를 포획 시 대상 물체가 구속 된 상태를 유지하도록 한다. 미세중력 환경 모사 실험을 통해서 포획장치가
원활히 구동되는 것을 확인하였다.
7. 결 론
본 연구에서는 다수의 링크로 구성된 우주잔해 제거 용 1 자유도 포획장치를 제안하였다. 제안된 포획장치 는 janitor 위성의 임무 수행에 미치는 영향을 최소화 하기 위해 위성의 측면에 4개의 링크군을 접힌 상태로 수납하도록 설계되었다. 각각의 링크군은 단일 구동축 의 회전 시 링크 내부에 연결된 kevlar wire가 구동축
에 연결된 reel에 감기면서 전개된다. 메커니즘의 구현 가능성을 검증하기 위해 3D printer를 이용하여 1/6 축소모델을 제작하였으며, 미세중력 환경을 모사한 수 중 전개실험을 통해 링크와 링크, 링크와 net사이에 간섭 없이 전개되는 것을 확인하였다. 그러나 제안된 포획장치는 전개된 후의 구조적 특성 및 요구조건, 포 획 대상의 텀블링에 관한 고려, 우주 환경에서의 적합 성 등에 관한 추가적인 연구가 필요하다. 향후 추가적 인 연구를 통해 실제 우주 환경에서 작동 가능한 우주 잔해 제거용 포획장치 개발이 가능할 것으로 기대된 다.
후 기
본 연구와 논문은 한국연구재단을 통해 교육과학기 술부의 우주기초원천기술개발 사업(NSL. National Space Lab)으로부터 지원받아 수행되었습니다.
(NRF-2015M1A3A3A02012496)
이 논문은 2017년도 한국항공대학교 교비지원 연구비 에 의하여 지원된 연구의 결과임.
References
[1] T. Schildknecht, “Optical surveys for space debris.”
Astronomy and Astrophysics Review, vol. 14, pp.
41-111, January 2007
[2] Y. Jung, “Recent status of international norms under discussion for outer space activities and its roles.”, Journal of Aerospace System Engineering, vol. 8, no.
2, pp. 1-6, June 2014
[3] “IADC space debris mitigation guidelines.”
Inter-Agency Space Debris Coordination Committee, IADC-02-01 Revision. 1, September 2007
[4] V. Y. Banine, L. P. Bakker, V. V. Ivanov, J. H. J.
Moors, G. G. Zukavishvili, and A. Veefkind,
"Lithographic apparatus having a debris-mitigation system, a source for producing EUV radiation having a debris mitigation system and a method for mitigating debris." U.S. Patent No. 7,251,012. 31,
Jul 2007
[5] M. Shan, J. Guo, and E. Gill, “Review and comparison of active space debris capturing and removal methods.” Progress in Aerospace Sciences, vol. 80, pp. 18-32, January 2016
[6] C. R. Phipps, “A laser-optical system to re-enter or lower low Earth orbit space debris.” Acta Astronautica, vol. 93, pp. 418-429, January 2014 [7] Z. Guang, and Z. Jing-rui, "Space tether net system
for debris capture and removal." , 2012 4th International Conference on Intelligent Human-Machine Systems and Cybernetics(IHMSC).
IEEE, Vol. 1, pp. 257-261, 2012
[8] H. Kim, M. Kim, “Research trends on space debris removal using a cubesat.”, The Korean Society for Aeronautical & Space Sciences, vol. 43.9, pp.
845-857, September 2015
[9] G. K. Batchelor, "An introduction to fluid dynamics.", Cambridge University Press, 2000