장단기 메모리를 이용한 새로운 선박 이동 경로 예측 방법
A New Vessel Path Prediction Method using Long Short-term Memory 저자
(Authors)
김종희, 정찬호, 강도근, 이창진
Jonghee Kim, Chanho Jung, Dokeun Kang, Chang Jin Lee 출처
(Source)
전기학회논문지69(7), 2020.7, 1131-1134 (4 pages)
The transactions of The Korean Institute of Electrical Engineers69(7), 2020.7, 1131-1134 (4 pages) 발행처
(Publisher)
대한전기학회
The Korean Institute of Electrical Engineers
URL http://www.dbpia.co.kr/journal/articleDetail?nodeId=NODE09364803 APA Style 김종희, 정찬호, 강도근, 이창진 (2020). 장단기 메모리를 이용한 새로운 선박 이동 경로 예측 방법. 전기학회논문지, 69(7), 1131-1134. 이용정보 (Accessed) 저작권 안내
DBpia에서 제공되는 모든 저작물의 저작권은 원저작자에게 있으며, 누리미디어는 각 저작물의 내용을 보증하거나 책임을 지지 않습니다. 그리고 DBpia에서 제공되는 저작물은 DBpia와 구독 계약을 체결한 기관소속 이용자 혹은 해당 저작물의 개별 구매자가 비영리적으로만 이용할 수 있습니다. 그러므로 이에 위반하여 DBpia에서 제공되는 저작물을 복제, 전송 등의 방법으로 무단 이용하는 경우 관련 법령에 따라 민, 형사상의 책임을 질 수 있습니다.
Copyright Information
Copyright of all literary works provided by DBpia belongs to the copyright holder(s)and Nurimedia does not guarantee contents of the literary work or assume responsibility for the same. In addition, the literary works provided by DBpia may only be used by the users affiliated to the institutions which executed a subscription agreement with DBpia or the individual purchasers of the literary work(s)for non-commercial purposes. Therefore, any person who illegally uses the literary works provided by DBpia by means of reproduction or
KAIST 143.***.103.66 2021/04/28 10:54 (KST)
1. Introduction
선박의 이동 경로 예측은 선박 간의 충돌을 방지하거나 특, 정 위치에 선박이 도착할 가능성 등을 예측하는 데 필요하다. 하지만 해상에서는 지정된 이동 경로가 없어 선박의 자유도, , 가 높으므로 이동 경로를 예측하기가 매우 어렵다 이를 해결. 하기 위해, [1]에서는 군집화와 신경망을 이용하여 다음 위치 를 분류하는 문제로 경로를 예측하는 방법을 보였다 본 논문. 에서는 Long Short-Term Memory (LSTM) [2]을 이용하여 선 박의 이동 경로를 예측하는 방법을 제안하려고 한다. LSTM을 비롯한 recurrent neural network (RNN)은 시간이 포함된 데이 터를 취급하기 적합하여 경로 예측 등에 많이 사용되었다 , [3]. 특히, LSTM은 Memory를 포함하여 기존의 , RNN이 단기의 데 이터에만 의존하는 것과는 달리 장기의 데이터들을 고려하여 , 예측을 할 수 있는 방법으로 경로 예측에 효과적이다 일반적, . 으로 LSTM을 사용하는 방법들은 LSTM을 특징 벡터를 추출 하기 위해 사용하고, fully connected layer (FC)를 회귀 모델로 사용한다 본 논문에서 제안하는 . LSTM 기반의 방법은 이와는 달리, 3개의 LSTM을 이용하는 방법으로, LSTM들이 특징 벡 터 추출 및 회귀 모델을 모두 구성하는 형태이다 또한 기존 . , 입력 및 출력 벡터와는 다른 선박 이동 경로 예측에 최적화된 입력 및 출력 벡터를 제안한다 제안하는 방법의 효과를 보이. 기 위하여 일반적으로 사용되는 형태인 개의 , 1 LSTM과 개의 1 를 가지는 구조를 대조군으로 삼는다 실험을 통해 제안하 FC . 는 개의 3 LSTM을 사용하는 방법이 매우 정확하게 선박의 이 동 경로를 예측함을 보이며 대조군보다 더 정확하게 선박의 , 이동 경로를 예측함을 보인다.2. Proposed Method
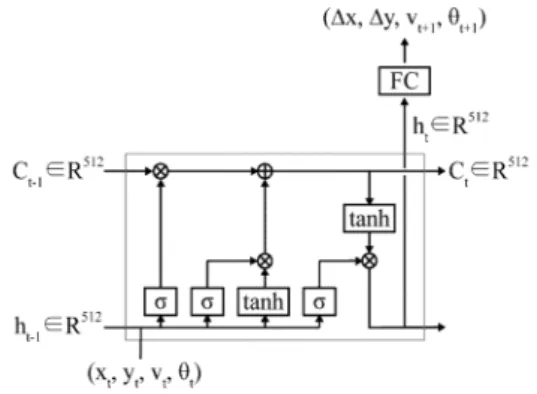
본 논문에서는 선박 이동 경로 예측을 위하여 LSTM을 이 용하는 방법을 제안한다 제안하는 방법을 설명하기에 앞서. , 일반적으로 많이 사용되는 구조를 가지는 대조군을 먼저 설명 한다 대조군은 . FC가 회귀 모델로 많이 사용되는 것을 고려하 여, LSTM으로 특징 벡터를 추출하고 추출된 특징 벡터에서 , 를 회귀 모델로 향후 경로를 예측한 것이다 그림 과 같이 FC . 1 개의 과 개의 로 이루어진 모델로 은 개 1 LSTM 1 FC , LSTM 512 의 출력 노드를 가지고 FC는 512개의 입력을 받아 개의 값4 을 출력하는 형태이다 이때 입력 . , 는 (1)과 같이 정의한다. . (1)A New Vessel Path Prediction Method using Long Short-term Memory
장단기 메모리를 이용한 새로운 선박 이동 경로 예측 방법
Jonghee Kim⋅Chanho Jung⋅Dokeun Kang⋅Chang Jin Lee
김종희*⋅정찬호†⋅강도근**⋅이창진***
Abstract
In this paper, we propose a new vessel path prediction method using long short-term memory (LSTM). LSTM is one of recurrent neural networks which contains memory cell in order to deal with long-term data. In order to fully utilize the advantage of LSTM, our proposed method employs 3-layer LSTM instead of a fully connected layer. We also propose new input and output vectors well suited for the vessel path prediction. In order to prove the effectiveness of the proposed method, we compare the proposed method with a baseline method which consists of a LSTM and a fully connected layer. In comparison between the proposed method and the baseline method, the proposed method outperforms the baseline method based on LSTM.
Key Words
vessel path prediction, recurrent neural network (RNN), long-short-term memory (LSTM)
†Corresponding Author : Dept. of Electrical Engineering, Hanbat National University, Korea E-mail: [email protected]
https://orcid.org/0000-0003-3145-6732
*School of Electrical Engineering, Korea Advanced Institute of Science and Technology, Korea
https://orcid.org/0000-0003-4836-2038
**The 3rd R&D Institute - 4th directorate, Agency for Defense Development, Korea https://orcid.org/0000-0003-3363-853X
***The 5th R&D Insitute - 1st Directorate, Agency for Defense Development, Korea https://orcid.org/0000-0002-1697-143X
Received : May 5, 2020 Revised : June 4, 2020 Accepted : June 10, 2020
Copyright ⓒThe Korean Institute of Electrical Engineers
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0/) which permits un- restricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1132 The Transactions of the Korean Institute of Electrical Engineers, vol. 69, no. 7, July, pp. 1131~1134, 2020
여기서, 는 각각 시간 에서의 위도와 경도를 나타내
고, 와 는 각각 시간 에서의 속도와 방향을 나타낸다 그.
리고 출력 , 는 (2)와 같이 정의한다.
그림 1 LSTM-Baseline 구조 Fig. 1 LSTM-Baseline architecture
∆ ∆ (2) 여기서, ∆∆는 각각 위도와 경도의 변화량으로, 에 ∆∆를 더하여 다음 시간 에서의 위도와 경도의 값 을 예측한다 이 방법을 . LSTM-B (LSTM-Baseline)이 라고 정의한다. 제안하는 방법은 그림 와 같이 층의 2 3 LSTM으로 이루어진 구조를 가진다 제안하는 방법은 이전 시간의 정보를 고려하. 지 않는 FC를 사용하지 않고, 3개의 LSTM을 사용하여 LSTM 만으로 특징 벡터 추출 및 회귀 모델로 사용한 것이다 이 중 . 첫 번째 LSTM은 개의 입력을 받아 개의 은닉 노드를 생성4 8 하고 두 번째 , LSTM은 개의 은닉 노드를 입력으로 하여 다8 , 른 개의 은닉 노드를 생성한다 세 번째 8 . LSTM은 다시 개의 8 은닉 노드를 입력으로 받아 개의 출력을 생성한다 그리고4 . , 에서는 속도 LSTM-B 와 방향 를 입출력으로 사용하는데 이렇게 할 경우 속도와 방향이 독립된 것으로 보는 문제가 , 있고 이에 더해 도 근처에서 방향 변화를 제대로 인식하기 , 0 어려울 수 있다 예를 들어. , 359도에서 도로 변하는 차이를 1 2 도가 아닌 358도로 인식하는 문제가 있다 따라서 방향을 . , cos과 sin 함수를 이용하여 위도 방향과 경도 방향으로 분, 리하고 이에 속도 , 를 곱하여 사용하도록 하였다 또한 속도. , 와 방향을 바로 예측할 경우 오차가 매우 클 수 있으므로 , 의 변화량만을 예측하여 오차를 줄일 수 있도록 하였다. 이에 따른 입력 와 출력 의 정의는 (3)-(5)와 같다. , (3) cos sin. (4) ∆∆∆∆. (5) 여기서, ∆∆ 는 각각 위도와 경도 축에 대한 방향의 변화량으로, 에 ∆∆ 를 더하여 다음 시간 에서 의 위도와 경도 축에 대한 방향 을 예측한다 이 방. 법을 LSTM-P (LSTM-Proposed)라고 정의한다. 공정한 비교를 위하여 두 방법의 학습을 동일하게 진행하, 였다 두 방법에서 입출력 데이터를 사용할 때에는 각 데이터. 의 범위를 같게 하여 값의 범위가 큰 특정 데이터에 의존하, 지 않도록 한다 다시 말하면 위도 경도 속도 방향들을 최. , , , , 대 최소값을 정규화하여 , ( 1, 1)– 의 범위를 가지도록 한다 그. 리고 출력값 또한 , (-1, 1)의 범위를 가지는데 이를 정규화할 때 나눠준 값을 이용해 원래의 범위로 복원한다 학습은 예측 . 결과와 실제 경로의 차이를 이용한다 학습을 위한 목적 함수. 는 (6)과 같다. 그림 2 LSTM-Proposed 구조 Fig. 2 LSTM-Proposed architecture
(6) 여기서, 는 LSTM-에 대한 목적 함수를 나타내고, 은 LSTM-에서 사용되는 시간의 데이터, 은 시간에 대한 LSTM-의 예측을 나타낸다 이전 분의 경로를 . 60 이용하여 향후 20분의 경로를 예측하며 예측된 , 20분의 경로 에 대해서만 목적 함수를 계산한다 학습은 . Adam optimizer 를 이용하여 목적 함수를 최소화하는 방식으로 이루어진다 [4] . 학습은 각 선박 별로 주어진 데이터를 모두 사용하였을 때를 으로 정의하여 총 동안 학습을 진행한다 1 epoch 100 epoch .이때 학습률 (learning rate)는 에서 시작하여, 50 epoch와 에서 각각 씩 나누어준다 75 epoch 10 .
3. Experimental Results
제안하는 방법의 학습 및 평가를 위하여 수집한 21개의 선 박의 이동 경로 데이터를 이용하였다 이 중. , 90%는 모델 학 습을 위해 사용하였고 나머지 , 10%를 평가를 위해 사용하였 다 평가는 학습에서와 마찬가지로 이전 시간의 경로를 이용. 1 하여 향후 20분의 경로를 예측하는 방식으로 진행되었다. 각 방법의 예측에 대한 평균 오차는 표 과 같다 참고로1 . , 실험에 사용한 선박들의 최대 속도는 시속 46.3km로 20분 후 의 예측 오차는 최대 30.87km까지 발생할 수 있다 이와 비교. 하여 제안하는 방법의 평균 오차는 2.59km로 최대 오차에 비 해 약 10% 미만의 오차를 보여 상당히 정확한 예측을 하는 것을 알 수 있다. 표 제안하는 방법의 예측 오차1Table 1 Prediction error of the proposed method
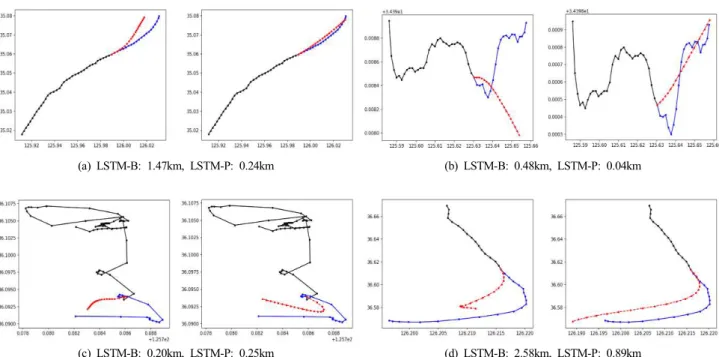
방법 평균 오차 (km) LSTM-Baseline 2.95 LSTM-Proposed 2.59 두 방법을 비교하면, LSTM-B는 개의 1 LSTM과 개의 1 FC를 사용하며 속도와 방향을 분리하여 사용하였다 이와는 달리. , 는 층의 을 사용하였고 속도와 방향을 결합하 LSTM-P 3 LSTM , 여 각 위도 경도 방향으로의 속도 성분을 추출하여 사용하였, 다. LSTM-B의 평균 오차는 2.95km이고, LSTM-P의 평균 오차 는 2.59km로 두 방법 중 LSTM-P의 오차가 더 적은 것을 알 수 있고 이로 미루어 보아, , 3층 구조의 LSTM과 속도와 방향 을 결합한 입출력을 사용하는 것이 더 정확한 예측을 가능하 게 함을 알 수 있다. 그림 에서는 3 LSTM-B와 LSTM-P를 사용하여 예측한 경로 들의 예시를 보였다 예측된 결과를 보면 대체로 원래 경로와 . , 유사한 형태의 경로를 생성하는 것을 확인할 수 있다 예측하. 는 시간이 지남에 따라 실제 정보가 아닌 가상으로 생성된 , 정보의 비중이 높아져 예측이 점점 어려워진다 하지만 그림 , . , 의 오른쪽 아래에 있는 그림과 같이 예측하기 어려운 회전 3 , 을 가지는 경로에서도 학습된 모델을 이용하여 실제 경로와 , 근접한 형태의 회전을 하는 경로를 예측할 수 있음을 확인할 수 있다.
4. Conclusion
본 논문에서는 선박의 이동 경로 예측을 위하여, LSTM을 이용하는 방법을 제안하였다. 3개의 LSTM을 기반으로 하는 구조의 예측 방법 및 선박 이동 경로 예측에 최적화된 입력/ 출력 벡터를 제안하였고 제안하는 방법은 매우 정확한 선박 , 경로 예측 정확도를 보였으며 일반적으로 사용되는 , LSTM과 를 결합한 형태의 방법에 비해 더 높은 fully connected layer성능을 보임을 확인하였다 이를 기반으로 향후에는 더욱 정. 확하게 예측할 수 있도록 보다 다양한 형태의 입출력 벡터와 구조를 탐색하려고 한다. (a) LSTM-B: 1.47km, LSTM-P: 0.24km (b) LSTM-B: 0.48km, LSTM-P: 0.04km (c) LSTM-B: 0.20km, LSTM-P: 0.25km (d) LSTM-B: 2.58km, LSTM-P: 0.89km 그림 예측 결과 예시 및 예측 오차 좌3 ( : LSTM-B, : LSTM-P, 우 검정 이전 경로 파랑 실제 경로 빨강 예측된 경로: , : , : )
1134 The Transactions of the Korean Institute of Electrical Engineers, vol. 69, no. 7, July, pp. 1131~1134, 2020
References
[1] S. Gan, S. Liang, K. Li, J. Deng, and T. Cheng, “Ship trajectory prediction for intelligent traffic management using clustering and ANN,” in Proc. Int. Conf. on Control, 2016. [2] S. Hochreiter and J. Schmidhuber, “Long short-term memory,”
Neural computation, 1997.
[3] A. Alahi, K. Goel, V. Ramanathan, A. Robicquet, L. Fei- Fei, and S. Savarese, “Social lstm: Human trajectory prediction in crowded spaces,” in Proc. IEEE Conf. Comp. Vis. and Patt. Rec., 2016.
[4] D. Kingma and J. Ba, “Adam: A method for stochastic optimization,” arXiv preprint arXiv:1412.6980, 2014.